Изобретение относится к автоматическому управлению производственными процессами и может быть использовано для управления механизированными стеллажами, конвейерами, гаражами, библиотеками и т.п.
Целью изобретения является расширение функциональных возможностей с одно- временным повышением надежности схемы.
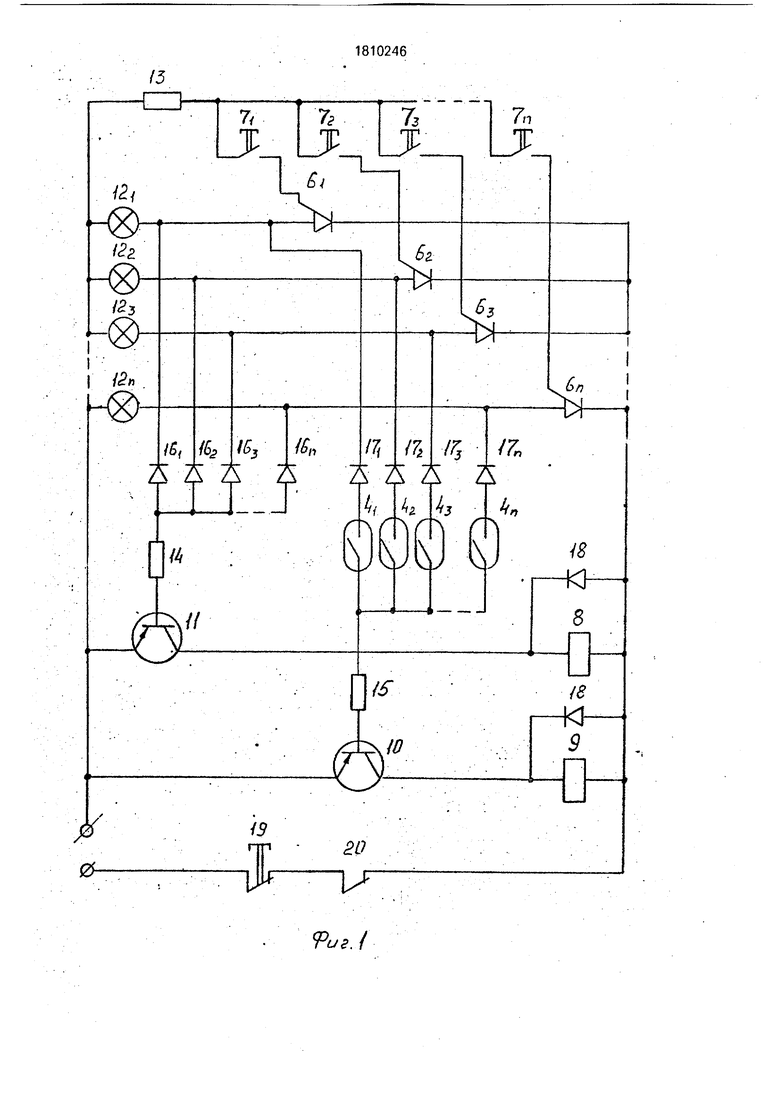
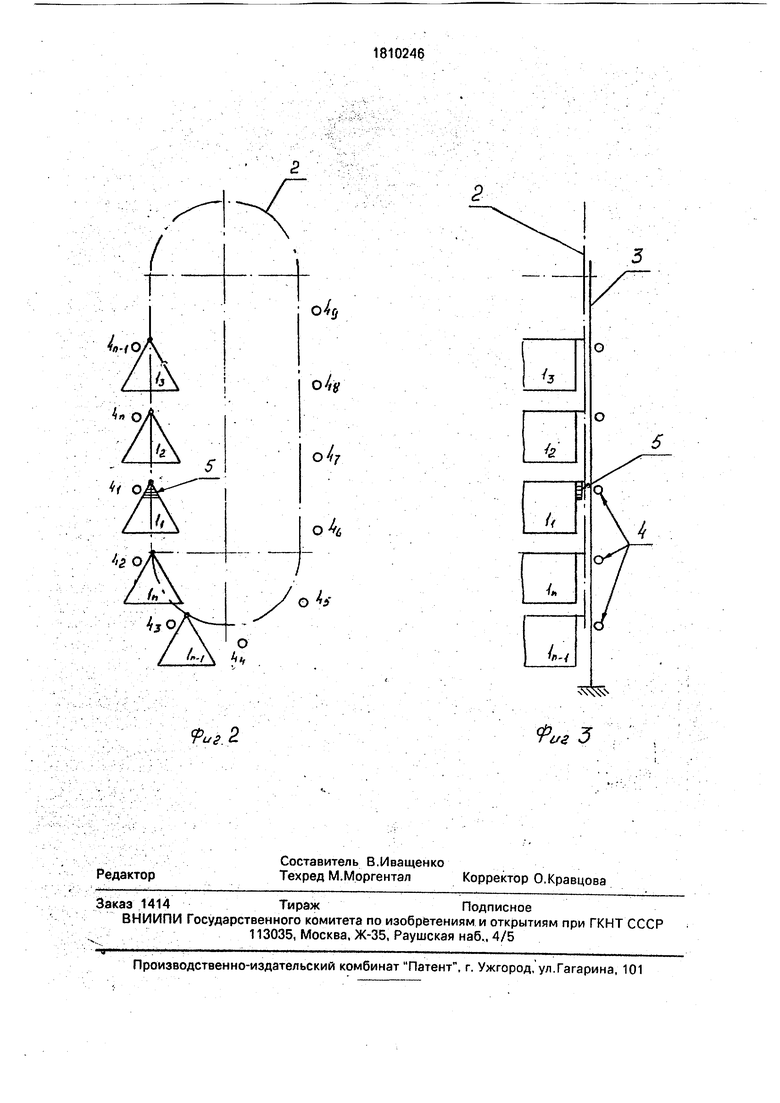
На фиг. 1 представлена принципиальная электрическая схема устройства для управления подвижным объектом; на фиг.2 - схема расположения датчиков адреса вдоль трассы движения подвижных объектов; на фиг.З -- вид А на схему расположения датчиков адреса.
Устройство для упрарления подвижным объектом, например механизированным стеллажным элеватором, включает N подвижных объектов 1, имеющих возможность перемещения вдоль трассы 2. На стойках 3 вдоль трассы перемещения 2 установлены
датчики адреса 4, число которых соответст- вует числу подвижных объектов с шагом, равным числу подвижных объектов. На одном из подвижных объектов 1 (на любом) установлен считывающий элемент 5. Датчики адреса подключены в анодную цепь запоминающих тиристоров 6, количество которых соответствует количеству адресов. Управляющий вывод каждого из тиристоров 6 последовательно соединен с соответствующей кнопкой адреса 7, катоды тиристоров соединены между собой и вторыми выводами катушек реле пуска 8 и реле остановки 9. Первый вывод катушки реле остановки 9 через транзисторный ключ 10 соединен с вторыми выводами всех датчиков адреса 4. . Первый вывод катушки реле пуска 8 через транзисторный ключ 11 соединен с анодом запоминающих тиристоров 6. В анодной цепи каждого тиристора 6 установлен сигнальный элемент 12, выполненный в виде лампочек, Для сглаживания напряжения в схеме установлены резисторы 13, 14, 15 и
00
о
hO Јь О
диоды 16, 17, 18. Кроме того, в катодной цепи тиристоров последовательно включены кнопка аварийного сброса адреса 19 и размыкающий контакт 20 реле остановки 9.
Устройство управления подвижным объектом работает следующим образом.
Подвижный объект, например, полки стеллажа элеватора, имеют возможность перемещаться вдоль трассы 2, смонтированной на стойке 3. На той же стойке 3 имеется стационарное место остановки для погрузки и разгрузки полок подвижного объекта. Например, необходимо отыскать полку 1з и остановить ее в месте разгрузки. Для этого оператор должен начать кнопку адреса 7з. При этом управляющий выход тиристора 6з отпирает тиристор и Пропускает электрический ток через транзисторный ключ 11 на катушку реле пуска 8, включается электродвигатель (на чертеже не показано), обеспечивающий движение подвижного объекта 1 вдоль трассы 2, Одновременно включается сигнальный элемент 12з, подтверждающий правильность выбранного адреса. Движение подвижного объекта будет продолжаться до тех пор, пока считывающий элемент 5, установленный на полке 11, не войдет в зону действия бесконтактного датчика адреса 4з, в результате чего через транзисторный ключ 10 подтоком окажется обмотка реле остановок 9. При этом, постоянно замкнугый контакт 20 этого реле разо- мкнет цепь двигателя и движение подвижного объекта вдоль трассы прекратится. Так как шаг расположения датчиков 4 соответствует шагу расположения полок 1 на подвижном объекте, то остановка искомых полок происходит всегда в одном и том же месте стойки 3: месте разгрузки.
. Схема работает аналогично при поиске любой другой полки. В случае неправильно набранного адреса или любой другой аварийной ситуации можно принудительно остановить движение полок и сбросить набранный адрес, разорвав электроцепь . посредством кнопки 19.
Формула изобретения Устройство для управления подвижным объектом, содержащее подвижный объект со считывающим элементом, датчики адреса, включенные параллельно и установленные на трассе, реле пуска и реле остановки двигателя , параллельно включенные и связанные с каждой из N цепей адресования, включающих последовательно установлен0 ные кнопку пуска, коммутационный элемент и сигнальную лампу, отличающее с я тем, что, с целью повышения надежности управления N подвижными объектами, движущимися по замкнутой трассе, с постоян5 ным местом разгрузки, в него введены два транзисторных ключа, сглаживающие диоды и резисторы, размыкающий контакт реле остановки, кнопка аварийного сброса адреса., при этом N коммутационные элементы
0 выполнены в виде запоминающих тиристоров, аноды которых через сглаживающие диоды подключены к первым выводам соответствующих им датчиков адреса, при этом катоды тиристоров подключены через пер5 вые выводы обмоток реле пуска и реле остановки, через размыкающий контакт реле остановки и кнопку аварийного сброса адреса к цепи питания, при этом вторые выводы датчиков адреса соединены между собой
0 и подключены через сглаживающий резистор к базе первого транзисторного ключа, эмиттер которого включен в цепь питания, а коллектор - к второму выводу обмотки реле остановки, кроме того, первые
5 выводы датчиков адреса соединены через сглаживающие диоды и резистор с базой второго транзисторного ключа, эмиттер которого включен в цепь питания, а коллектор подключен к второму выводу обмотки реле
0 пуска, при этом параллельно реле пуска и реле остановки включены диоды, аноды которых соединены с первыми выводами обмоток реле пуска и реле остановки, а катоды соединены с вторыми выводами обмоток ре5
ле пуска и реле остановки, кроме того, кнопки пуска установлены в цепях управляющих выводов тиристоров, при этом аноды тиристоров через сигнальные лампы включены в цепь питания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического адресования объекта по кратчайшему пути | 1987 |
|
SU1479400A1 |
| Устройство для автоматического выбора направления движения полок элеваторного стеллажа по кратчайшему пути | 1984 |
|
SU1337327A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1983 |
|
SU1137033A1 |
| Устройство для контроля работы насоса | 1982 |
|
SU1072079A1 |
| КОМПЛЕКС АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КОНВЕЙЕРАМИ | 2016 |
|
RU2657527C2 |
| Устройство для аварийной сигнализации | 1980 |
|
SU868808A1 |
| Устройство для автоматического выбора направления движения полок элеваторного стеллажа по кратчайшему пути | 1983 |
|
SU1148825A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ РЕЖИМОМ РАБОТЫ ПЛАЗМОТРОНА И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2389055C2 |
| Устройство управления электроподогревом | 1988 |
|
SU1644107A1 |
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1539148A1 |
Использование: автоматическое управление производственными процессами, управление механизированными стеллажами, контейнерами. Сущность изобретения: датчики адресов установлены параллельно между собой. Коммутационный элемент выполнен в виде заполняющего тиристора. Вход тиристора Соединен с первым контактом соответствующего датчика адреса и через первый транзисторный ключ с реле пуска двигателя. Второй контакт датчика адреса через второй транзисторный ключ соединен с реле остановки двигателя. Устройство содержит кнопку пуска. Она установлена в цепи управляющего вывода тиристора. Шаг установки подвижных объектов соответствует шагу установки датчиков адреса. 3 ил.
| Устройство для автоматического поиска точки на замкнутой кривой | 1972 |
|
SU455891A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для управления подвижным объектом | 1987 |
|
SU1594102A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
