Изобретение относится к промышленному транспорту и может быть использовано для управления оборудованием с замкнутыми трассами движения, например, конвейерами, элеваторными стеллажами, тележками для межоперационных передач.
Цель изобретения - увеличение числа позиций адресования и упрощение устройства.
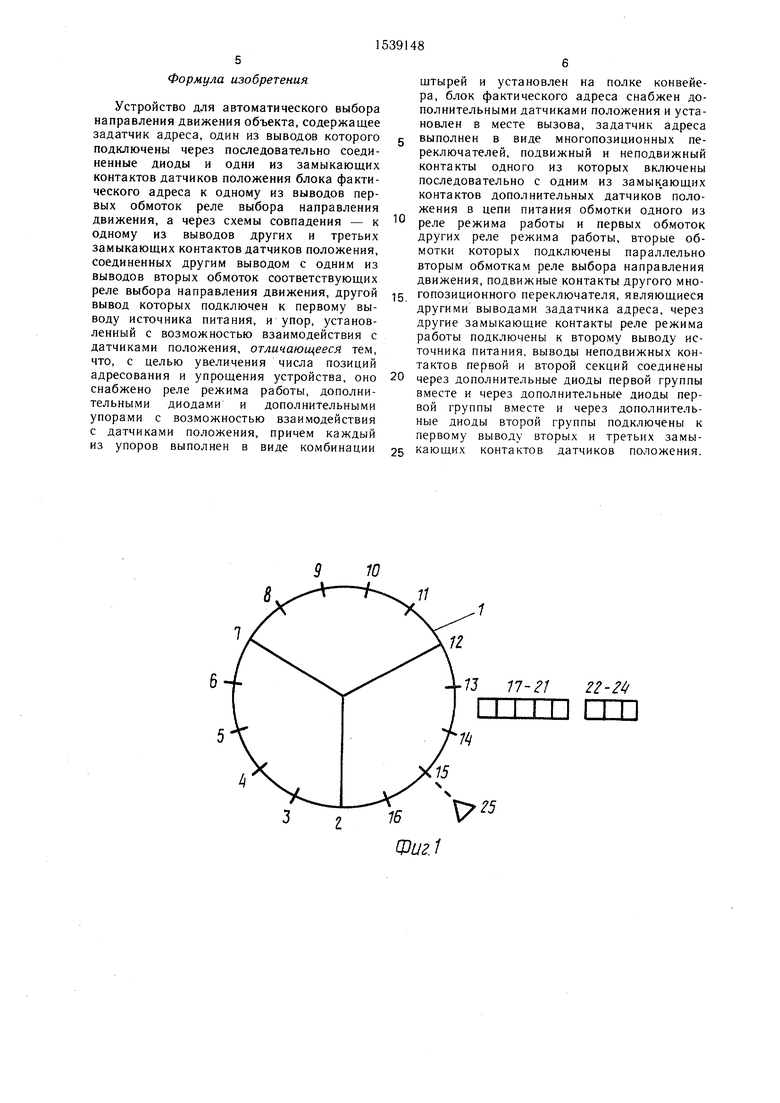
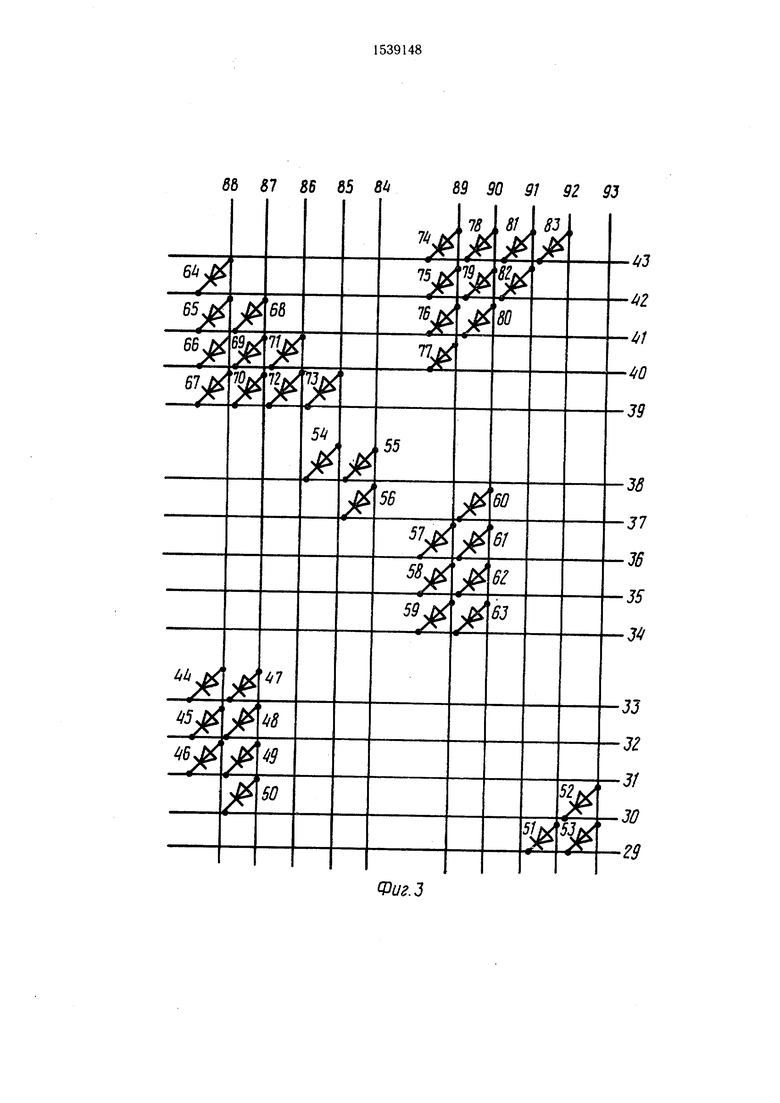
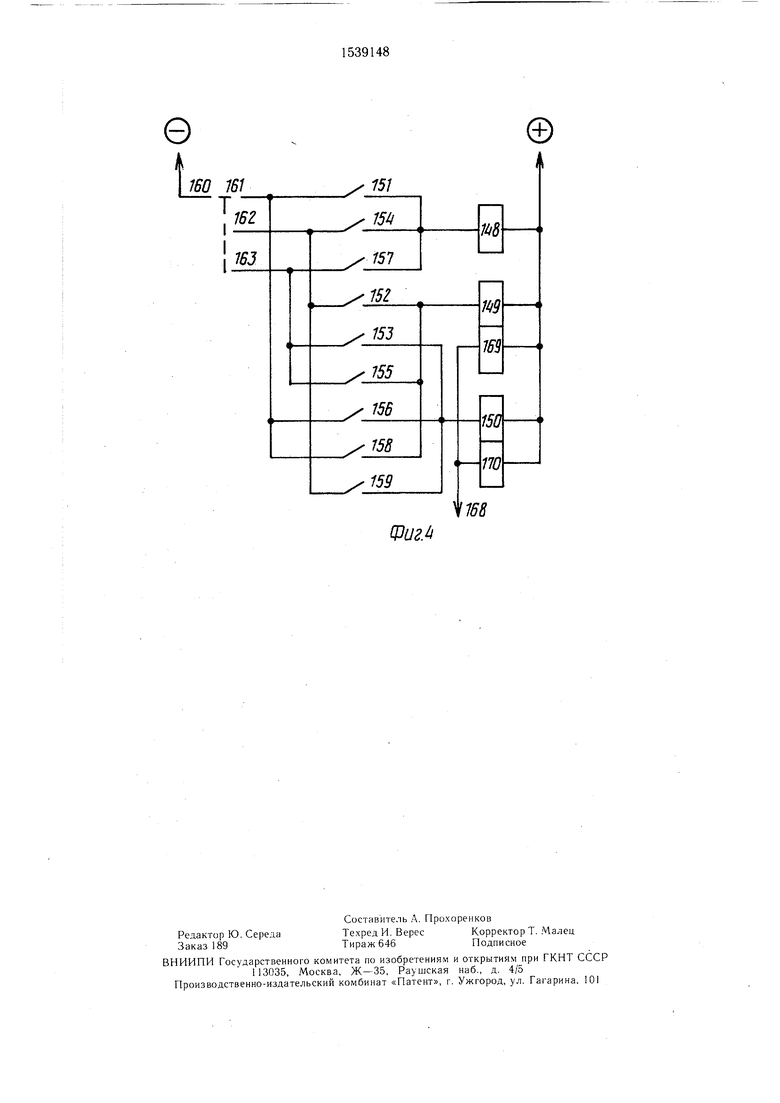
На фиг. 1 изображена схема трассы; на фиг. 2 - принципиальная электрическая схема предлагаемого устройства; на фиг. 3 - диодные комбинационные структуры схем совпадения; на фиг. 4 - принципиальная электрическая схема выбора режима.
Устройство для автоматического выбора направления движения объекта, например цепного конвейера 1 (фиг. 1) с полками 2-16 содержит установленные на последних упоры (не показано) с возможностью взаимодействия с датчиками 17-24 положения, а для каждой группы полок 2-16 - с датчиками 17-24 положения соответственно, которые расположены в месте 25 вызова, задатчик адреса в виде многопозиционного переключателя с подвижными контактами 26-28 (фиг. 2) и неподвижными контактами секций, подключенными через шины 29-43 соответственно к входам групп диодных схем совпадения и через и.х диоды 44-83 (фиг. 3) к первым выводам 84-93 блока фактического адреса, состоящего из замыкающих контактов 94-108 датчиков 17 - 21 положения, причем датчику 17 соответствуют контамы 94,99 и 104, датчику 18 - контакты 9.. 100 и 105, датчику 19 - контакты 9d 101 и 106, датчику 20 - контакты 1 102 и 107, датчику 21 - контакты 98, 10о 108
сд
со
СО
+00
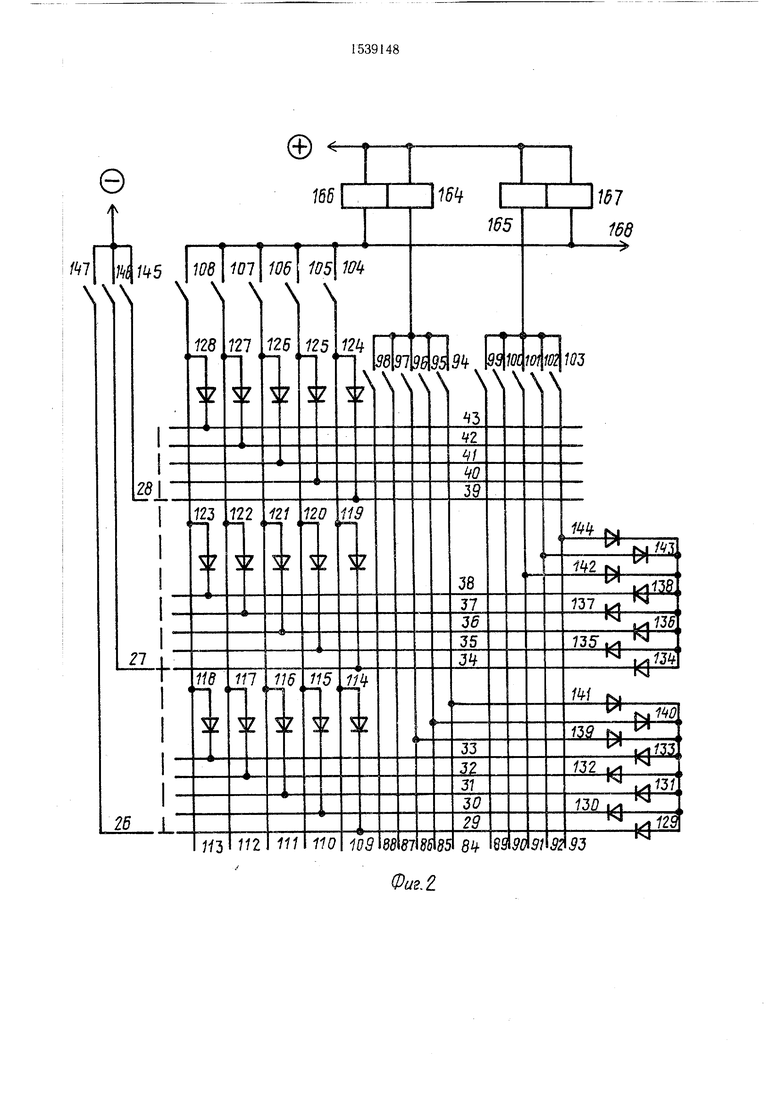
дополнительных шин 109-113 адресования, подключенных через разделительные диоды 114-118, 119-123, 124-128 соответственно к шинам 29-33, 34-38, 39-43 и непосредственно к замыкающим контактам 104-108 вторых выводов блока фактического положения, а также через разделительные диоды 129-133, 134-138 и встречно включенные соответственно диоды 139-141, 142-144 к первым группам выводов 84-86, 91-93 блока фактического адреса, которые согласно программе работы объекта 1 закорочены между собой, подвижных контактов 26-28 задатчика адреса, подключенных к источнику питания (не показано) через соответствующие замыкающие контакты 145-147 соответственно реле режима работы, обмотки 148-150 (фиг. 4) которых первыми выводами подключены к одному выводу источника питания, а вторыми выводами через замыкающие контакты 151 - 153, 154-156, 157-159 соответственно датчиков 22-24 положения и подвижный контакт 160 задатчика адреса через шины 161 -163 старшего разряда, образуя последовательные системы 148, 151, 161; 148, 154, 162; 148, 157, 163; 149, 152, 162; 149, 155, 163; 149, 158, 161; 150, 153, 163; 150, 153, 163; 150, 156, 16Г, 150, 159, 162; к второму выводу источника питания, реле выбора направления движения, первые обмотки 164 и 165 которых подключены соответственно к замыкающим контактам 94-98, 99-103, а вторые обмотки 166 и 167 - к замыкающим контактам 104-108 третьего 168 вывода блока фактического положения и они же через вторые обмотки 169 и 170 реле режима - к другому выводу источника питания.
Устройство работает следующим образом.
Цепной конвейер I воздействует упорами полки 15 на датчик 20 младшего разряда и датчик 24 старшего разряда, что соответствует местонахождению у места 25 вывоза. Замкнуты контакты 97, 102 и 107 датчика 20 и контакты 157-159 датчика 24. Задатчик адреса установлен, например, подвижными контактами 26-28 соответственно на шины 29, 34 и 39, а подвижным контактом 160 на шину 163, что соответствует полке 12. По цепи: подвижной контакт 160, шина 163, контакт 157, включается обмотка 148 и замыкается контакт 145. По цепи: контакт 145, подвижный контакт 28, шина 39, диод 70, вывод 87, контакт 97, включается обмотка 164, ставящая реле выбора направления шижения на механическую защелку. По команде реле направления полка 12 начинает перемещаться к месту 25 вызова. При достижении полкой 12 места 25 вызова опять включается обмотка 148 и по цепи: контакт 145, подвижный контакт 28,
диод 124, контакт 104 датчика 17 включаются обмотки 166, 167, 169 и 170. Обмотка 166 включает реле выбора направления движения,
Цепной конвейер 1 воздействует упорами полки 16 на датчик 21 младшего разряда и датчик 24 старшего разряда, что соответствует ее местонахождению у места 25 вызова. Замкнуты контакты 98, 103 и 108
0 датчика 21 и контакты 157-159 датчика 24. Задатчик адреса установлен, например, подвижными контактами 26-28 соответственно на шины 29, 34 и 39, а подвижным контактом 160 на шину 161, что соответствует полке 2. По цепи: подвижный контакт 160, шина 161, контакт 158 включается обмотка 149, ставящая на механическую защелку реле режима, замыкается контакт 146. По цепи контакт 146, подвижный 27, шина 34, диод 134, диод 144, выQ вод 93, контакт 103 включается обмотка 165, ставящая на механическую защелку реле выбора направления движения. По команде реле направления полка 2 начинает перемещаться к месту 25 вызова. При достижении полкой 2 места 25 вызова по цепи:
5 контакт 146, подвижный контакт 27, диод 119, контакт 104 датчика 17 включаются обмотки 166, 167, 169 и 170. Обмотки 167 и 169 отключают соответственно реле выбора направления движения и режима.
0 Цепной конвейер 1 воздействует упорами полки 14 на датчик 19 младшего разряда и датчик 24 старшего разряда, что соответствует ее местонахождению у места 25 вызова. Замкнуты контакты 96, 101 и 106 датчика 19 и контакты 157-159 датчика 24.
5 Задатчик адреса установлен, например, подвижными контактами 26-28 сответствен- но на шины 33, 38 и 43, а подвижным контактом 160 на шину 162, что соответствует полке 11. По цепи: подвиж0 ный контакт 160, шина 162, контакт 159 включается обмотка 150, ставящая на механическую защелку реле выбора направления движения, замыкается контакт 147. По цепи: контакт 147, подвижный контакт 26, шина 33, диод 133, диод 139, вывод 86,
5 контакт 96 включается обмотка 164, ставящая на механическую защелку реле выбора направления движения. По команде реле выбора направления движения полка 11 начинает перемещаться к месту 25 вызова. При достижении полкой 11 места 25 вызова по цепи: контакт 147, подвижный контакт 26, диод 118, контакт 108 датчика 21 включаются обмотки 166, 167, 169 и 170. Обмотки 166 и 170 отключают соответственно реле выбора направg ления движения и режима.
Работа устройства для прочих положений цепного конвейера 1 и вызываемых полок 2-16 аналогична.
0
Формула изобретения
Устройство для автоматического выбора направления движения объекта, содержащее задатчик адреса, один из выводов которого подключены через последовательно соединенные диоды и одни из замыкающих контактов датчиков положения блока фактического адреса к одному из выводов первых обмоток реле выбора направления движения, а через схемы совпадения - к одному из выводов других и третьих замыкающих контактов датчиков положения, соединенных другим выводом с одним из выводов вторых обмоток соответствующих реле выбора направления движения, другой вывод которых подключен к первому выводу источника питания, и упор, установленный с возможностью взаимодействия с датчиками положения, отличающееся тем, что, с целью увеличения числа позиций адресования и упрощения устройства, оно снабжено реле режима работы, дополнительными диодами и дополнительными упорами с возможностью взаимодействия с датчиками положения, причем каждый из упоров выполнен в виде комбинации
0
штырей и установлен на полке конвейера, блок фактического адреса снабжен дополнительными датчиками положения и установлен в месте вызова, задатчик адреса выполнен в виде многопозиционных переключателей, подвижный и неподвижный контакты одного из которых включены последовательно с одним из замыкающих контактов дополнительных датчиков положения в цепи питания обмотки одного из реле режима работы и первых обмоток других реле режима работы, вторые обмотки которых подключены параллельно вторым обмоткам реле выбора направления движения, подвижные контакты другого мно5 гопозиционного переключателя, являющиеся другими выводами задатчика адреса, через другие замыкающие контакты реле режима работы подключены к второму выводу источника питания, выводы неподвижных контактов первой и второй секций соединены
0 через дополнительные диоды первой группы вместе и через дополнительные диоды первой группы вместе и через дополнительные диоды второй группы подключены к первому выводу вторых и третьих замы5 кающих контактов датчиков положения.
Изобретение относится к промышленному транспорту и может быть использовано для управления оборудованием с замкнутыми трассами движения. Цель изобретения - увеличение числа позиций адресования и упрощение устройства. Устройство содержит задатчик адреса, выполненный в виде многопозиционных переключателей, включенных в цепи питания обмоток реле выбора направления движения через последовательно соединенные разделительные диоды, схему совпадения и замыкающие контакты (К) первых датчиков положения (ДП) блока фактического адреса и реле режима работы (РРР) и в цепи питания обмоток РРР через К вторых ДП. На полках конвейера установлены упоры с возможностью взаимодействия с ДП, расположенными в месте вызова. При задании требуемой полки включается РРР. Его К в зависимости от фактического положения заданной полки включает соответствующие реле выбора направления. По его команде полка конвейера перемещается к месту вызова. 4 ил.
--7J 17-21 22-2Ь
rrrm
74
15
16V
Фиг.1
25
Фиг. 2.
87 86 85 8b
89 90 91 92 95
43 42 41 40 39
33
37
36
35
34
33 32 31 30 29
Фиг.З
Ц
I I
®иг.ь
| Устройство для программного реверса движения люлечного конвейера | 1973 |
|
SU475326A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для автоматического выбора направления движения объекта | 1985 |
|
SU1289764A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
