1
Изобретение относится к промышленному транспорту, в частности к складским системам, и может быть использовано для автоматического управления механизированными стеллажами, конечными элеваторами и т.п.
Цель изобретения - повышение точности адресования и упрощение конструкции.
На фиг.1 изображено устройство дл автоматического адресования объекта по кратчайшему пути; на фиг.2 - вид А на фиг.1; на фиг.З - электрическая схема управления приводом перемещения объекта.
Устройство содержит адресный диск 1 с отверстиями 2, расположенными по окружности с угловым шагом позиций адресования, и шкалой 3 номеров, например, полок 4 элеваторного стеллажа 5. Адресный диск 1 жестко закреплен на валу 6, на котором свободно установлен задатчик 7 адреса, выполненный в виде диска 8 с кулачком 9 в виде полукруга и фиксатором 10, установленным с возможностью взаимодействия с отверстиями 2 адресного диска 1. На диске 8 укреплен указатель 11 номеров полок, а на основании 12 установлены датчики выбора направления движения, выполненные в виде конечных выключателей 13 и 14 со смещением от диаметральной плоскости на угол d. меньше углового шага позиций адресования и возможностью взаимодействия с кулачком 9 задатчика 7 адреса. Вал 6 кинематически связан с приводом 15 пе
0
5
0
0
5
ремещения полок 4 с помощью механической передачи 16 таким образом, что прохождение полкой 4 стеллажа 5 всей трассы соответствует одному обороту адресного диска 1. У окна 17 выдачи установлен датчик останова в виде конечного 18.1 и 18.2 выключателя 18 с размыкающими контактами с возможностью взаимодействия с полками 4 стеллажа 5.
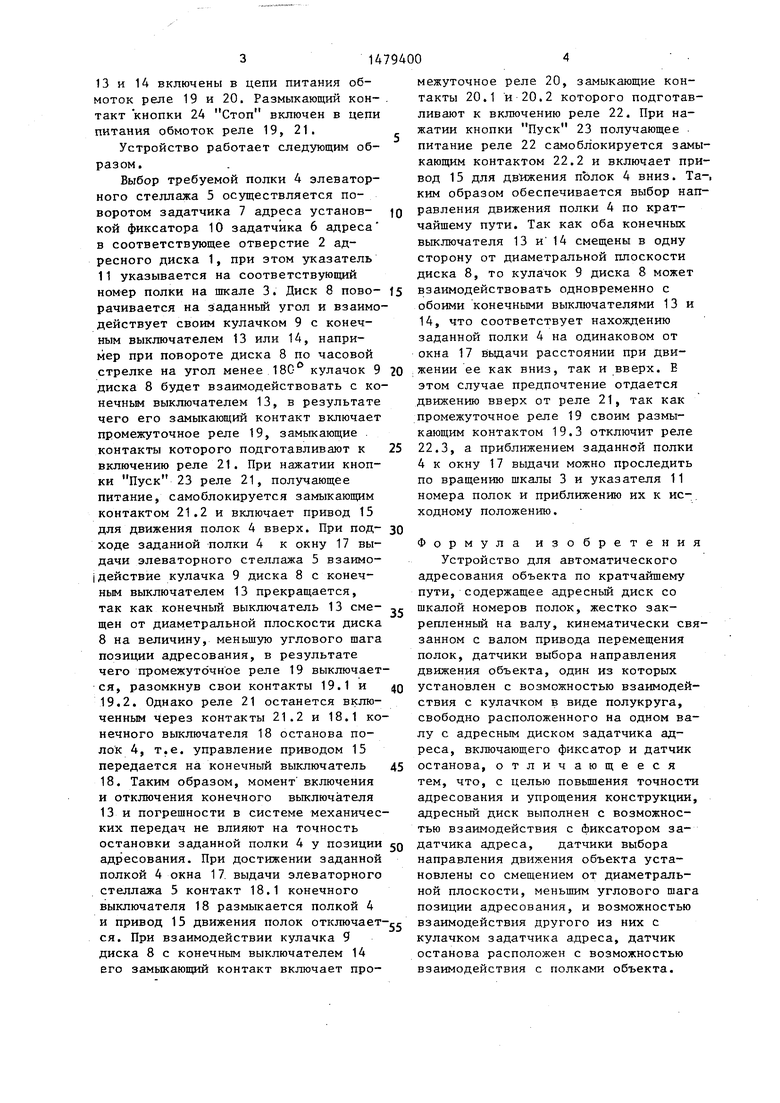
Блок управления приводом 15 перемещения полок 4 элеваторного стеллажа 5 содержит промежуточные реле 19 с замыкающими контактами 19.1 и 19.2 и размыкающим контактом 19.3, реле 20 с замыкающими контактами 20.1 и 20.2, реле 21 с размыкающим контактом 21.1 и замыкающим контактом 21.2, реле 22 с размыкающим и замыкающим контактами 22.1 и 22.2, кнопку 23 Пуск с замыкающими контактами 23.Г и 23.2 и кнопку 24 Стоп. Соединенные последовательно замыкающие контакты 23.1 и 19.1, а параллельно им замыкающие контакты 21.2 последовательно включены с параллельно соединенными замыкающим и размыкающим контактами 19.2 и 18,1 и размыкающим контактом 22.1 в цепь питания обмотки реле 21. Соединенные последовательно замыкающие и размыкающие контакты 23.2, 20.1 и 19.3 и подключенный к ним параллельно замыкающий контакт 22.2 включены последовательно с параллельно соединенными замыкающим и размыкающим контактами и размыкающим контактом 21.1 в цепь питания обмотки реле 22. Замыкающие контакты
13 и 14 включены в цепи питания обмоток реле 19 и 20. Размыкающий контакт кнопки 24 Стоп включен в цепи питания обмоток реле 19, 21.
Устройство работает следующим образом.
Выбор требуемой полки 4 элеваторного стеллажа 5 осуществляется поворотом задатчика 7 адреса установкой фиксатора 10 задатчика 6 адреса в соответствующее отверстие 2 адресного диска 1, при этом указатель 11 указывается на соответствующий номер полки на шкале 3. Диск 8 поворачивается на заданный угол и взаимодействует своим кулачком 9 с конечным выключателем 13 или 14, например при повороте диска 8 по часовой стрелке на угол менее 180° кулачок 9 диска 8 будет взаимодействовать с конечным выключателем 13, в результате чего его замыкающий контакт включает промежуточное реле 19, замыкающие контакты которого подготавливают к включению реле 21. При нажатии кнопки Пуск 23 реле 21, получающее питание, самоблокируется замыкающим контактом 21.2 и включает привод 15 для движения полок 4 вверх. При под- ходе заданной полки 4 к окну 17 выдачи элеваторного стеллажа 5 взаимо- I действие кулачка 9 диска 8 с конечным выключателем 13 прекращается, так как конечный выключатель 13 смещен от диаметральной плоскости диска 8 на величину, меньшую углового шага позиции адресования, в результате чего промежуточное реле 19 выключает
ся, разомкнув свои контакты 19.1 и
19.2. Однако реле 21 останется включенным через контакты 21.2 и 18.1 конечного выключателя 18 останова полок 4, т.е. управление приводом 15 передается на конечный выключатель 45 18. Таким образом, момент включения и отключения конечного выключателя 13 и погрешности в системе механических передач не влияют на точность остановки заданной полки 4 у позиции JQ адресования. При достижении заданной полкой 4 окна 17 выдачи элеваторного стеллажа 5 контакт 18.1 конечного выключателя 18 размыкается полкой 4
и привод 15 движения полок отключает-, взаимодействия другого из них с
ся. При взаимодействии кулачка 9 диска 8 с конечным выключателем 14 его замыкающий контакт включает прокулачком задатчика адреса, датчи останова расположен с возможност взаимодействия с полками объекта
0
5
0 5 0
5
0
5 Q
межуточное реле 20, замыкающие контакты 20.1 и 20.2 которого подготавливают к включению реле 22. При нажатии кнопки Пуск 23 получающее питание реле 22 самоблокируется замыкающим контактом 22.2 и включает привод 15 для движения полок 4 вниз. Та-, ким образом обеспечивается выбор направления движения полки 4 по кратчайшему пути. Так как оба конечных выключателя 13 и 14 смещены в одну сторону от диаметральной плоскости диска 8, то кулачок 9 диска 8 может взаимодействовать одновременно с обоими конечными выключателями 13 и 14, что соответствует нахождению заданной полки 4 на одинаковом от окна 17 выдачи расстоянии при движении ее как вниз, так и вверх. Е этом случае предпочтение отдается движению вверх от реле 21, так как промежуточное реле 19 своим размыкающим контактом 19.3 отключит реле 22.3, а приближением заданной полки 4 к окну 17 выдачи можно проследить по вращению шкалы 3 и указателя 11 номера полок и приближению их к исходному положению.
Формула изобретения
Устройство для автоматического адресования объекта по кратчайшему пути, содержащее адресный диск со шкалой номеров полок, жестко закрепленный на валу, кинематически связанном с валом привода перемещения полок, датчики выбора направления движения объекта, один из которых установлен с возможностью взаимодействия с кулачком в виде полукруга, свободно расположенного на одном валу с адресным диском задатчика адреса, включающего фиксатор и датчик останова, отличающееся тем, что, с целью повышения точности адресования и упрощения конструкции, адресный диск выполнен с возможностью взаимодействия с Фиксатором задатчика адреса, датчики выбора направления движения объекта установлены со смещением от диаметральной плоскости, меньшим углового шага позиции адресования, и возможностью
кулачком задатчика адреса, датчик останова расположен с возможностью взаимодействия с полками объекта.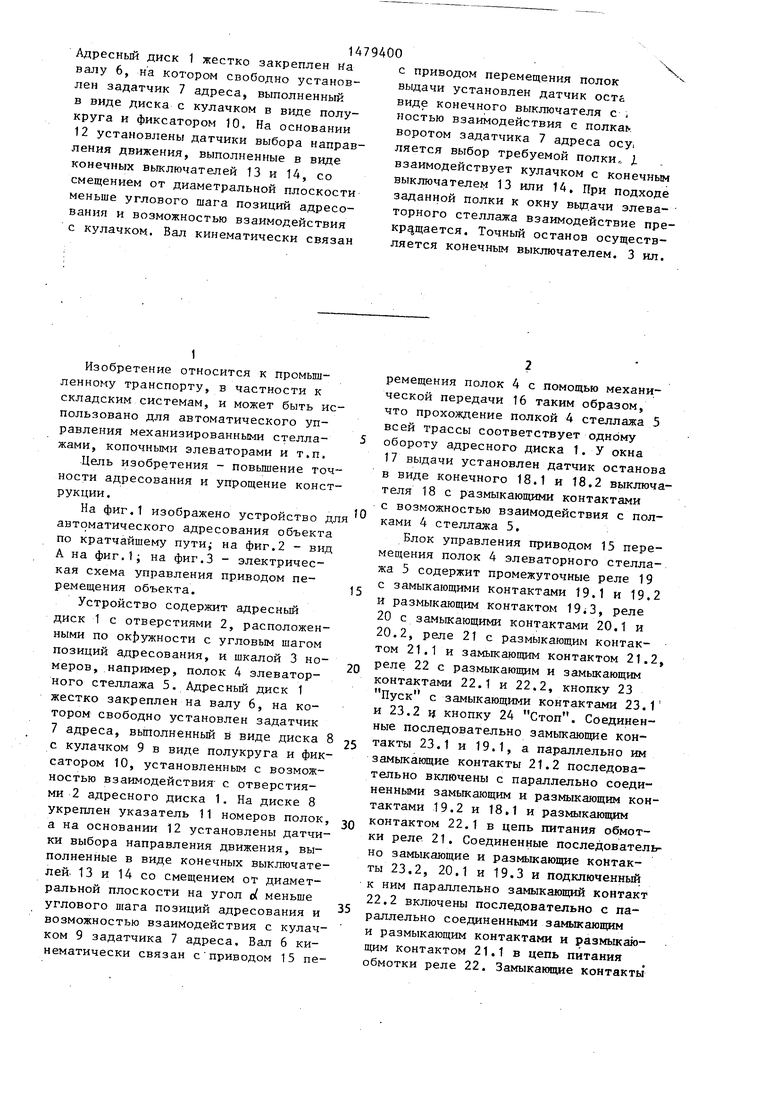
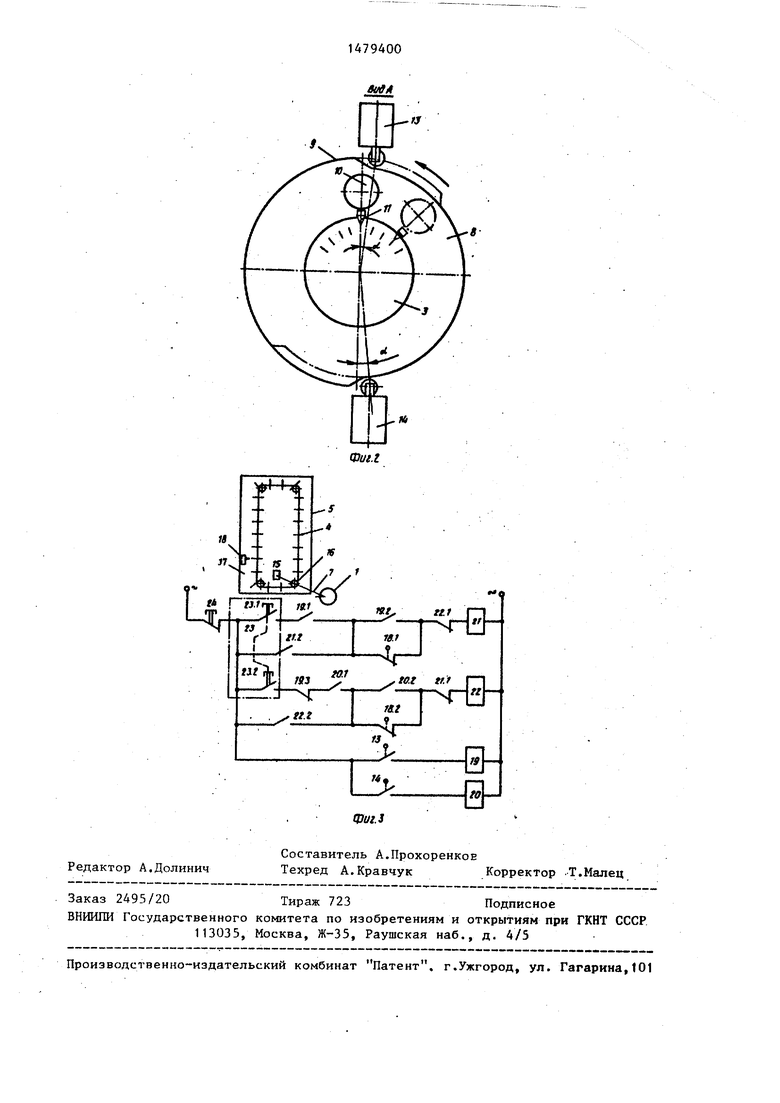
Изобретение относится к области промышленного транспорта, в частности к складским системам. Цель изобретения - повышение точности адресования и упрощение конструкции. Устройство содержит адресный диск 1 с отверстиями 2, расположенными по окружности с угловым шагом позиций адресования и шкалой 3 номеров, например, полок элеваторного стеллажа. Адресный диск 1 жестко закреплен на валу 6, на котором свободно установлен задатчик 7 адреса, выполненный в виде диска с кулачком в виде полукруга и фиксатором 10. На основании 12 установлены датчики выбора направления движения, выполненные в виде конечных выключателей 13 и 14, со смещением от диаметральной плоскости меньшего шага позиций адресования и возможностью взаимодействия с кулачком. Вал кинематически связан с приводом перемещения полок. У окна выдачи установлен датчик останова в виде конечного выключателя с возможностью взаимодействия с полками. Поворотом задатчика 7 адреса осуществляется выбор требуемой полки. Диск взаимодействует кулачком с конечным выключателем 13 или 14. При подходе заданной полки к окну выдачи элеваторного стеллажа взаимодействие прекращается. Точный останов осуществляется конечным выключателем. 3 ил.
wM-4
«
-- т
fi. ts /
1 Шй2х
«
г
«
| W
| Устройство для автоматического адресования объекта по кратчайшему пути | 1983 |
|
SU1117263A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство управления перемещениемпОлОК | 1977 |
|
SU821330A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
