Изобретение относится к машиностроению, а более конкретно к робототехнике.
Цель изобретения - повышение возможностей проведения реконфигурации в ограниченном пространстве, упрощение и расширение технических возможностей,
Это достигается тем, что перед расфйк- сацией частей многоподвижного шарнирного звена манипулятору придают и фиксируют конфигурацию, при которой ось шарнира реконфигурируемого многопод- йижного звена расположена горизонтально, а угол отклонения от вертикали прямой, проходящей через центр тяжести части манипулятора от второй половины звена до рабочего органа с захваченным объектом включительно перпендикулярно оси шарни- , оа реконфигурируемого звена равен требуемому углу взаимного поворота частей звена, причем изменение взаимного положения частей осуществляется заданием выдержки времени между расфиксацией и фиксацией взаимного положения частей многоподвижного звена.
Выдержка времени на реконфигурацию составляет от 1 до 20 с.
Сущность изобретения (заключается в следующем. Придание манипулятору конфигурации, при которой ось шарнира реконфигурируемого звена занимает горизонтальное положение, позволяет осуществлять реконфигурацию за счет силы тяжести без задания движений в сочленениях манипулятора. Выдерживание угла отклонения от вертикали равным требуемому для поворота, а также-задание достаточной для поворота выдержки времени (с учетом возможных колебаний от 1 до 20 с) позволяют осуществить взаимный поворот частей на требуемый угол.
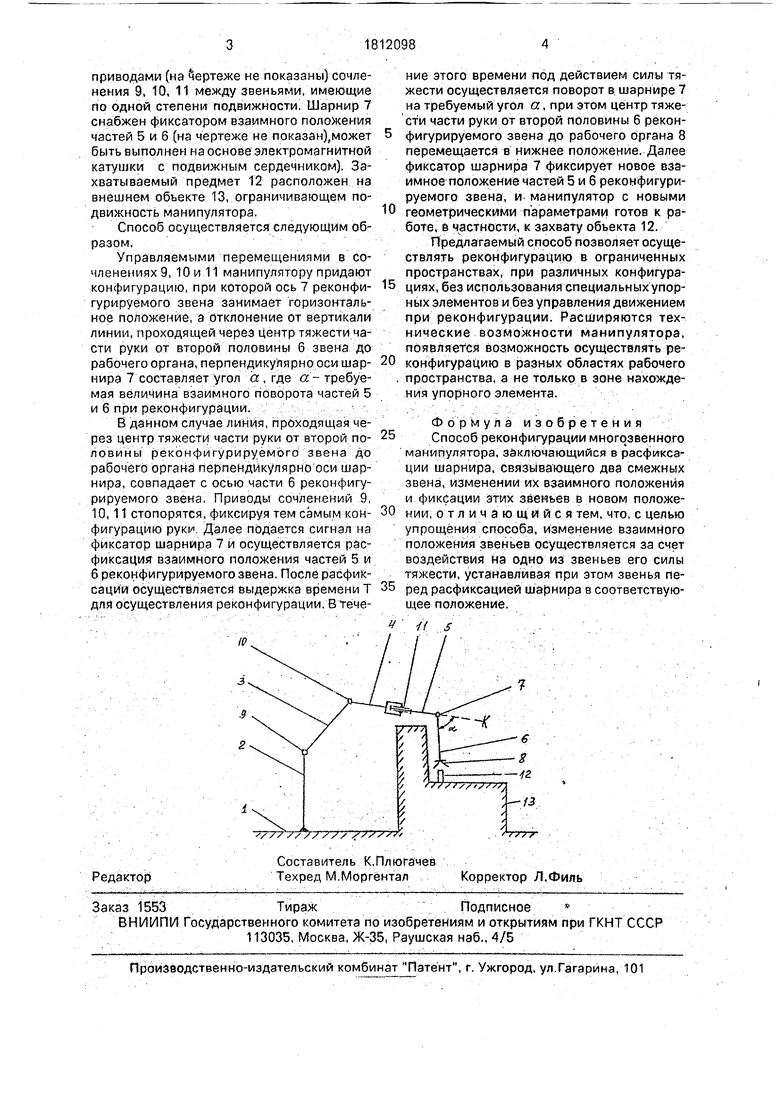
На чертеже показана кинематическая схема манипулятора после реконфигурации, пунктирной линией показаны положение рабочего органа и конфигурация многоподвижного звена перед началом реконфигурации.
Манипулятор для реализации способа содержит, например, основание 1, звенья 2-4, реконфигурируемое шарнирное звено, состоящее из двух частей 5 и 6, связанных шарниром 7 с одной степенью подвижности, рабочий орган (схват) 8 и снабженные
(Л
G
00
а
ю о о
00
приводами (на Чертеже не показаны) сочленения 9, 10, 11 между звеньями, имеющие по одной степени подвижности Шарнир 7 снабжен фиксатором взаимного положения частей 5 и 6 (на чертеже не показан),может быть выполнен на основе электромагнитной катушки с подвижным сердечником). Захватываемый предмет 12 расположен на внешнем объекте 13, ограничивающем подвижность манипулятора.
Способ осуществляется следующим образом.
Управляемыми перемещениями в сочленениях 9, 10 и 11 манипулятору придают конфигурацию, при которой ось 7 реконфи- гурируемого звена занимает горизонтальное положение, а отклонение от вертикали линии, проходящей через Центр тяжести части руки от второй половины 6 звена до рабочего органа, перпендикулярно оси шарнира 7 составляет угол а , где а- требуемая величина взаимного поворота частей 5 и 6 при реконфигурации. :
В данном случае линия, проходящая через центр тяжести части руки от второй половины рёконфигурируёмого звена до рабочего органе перпендикулярно оси шар- нирз, совпадает с осью части 6 рёконфигурируёмого звена, Приводы сочленений 9, 10,11 стопорятся, фиксируя тем самым конфигурацию руки. Далее подается сигнал на фиксатор шарнира 7 и осуществляется рзс- фиксацмя взаимного положения частей 5 и б реконфигурируемого звена. После расфик- сации осуществляется выдержка времени Т для осуществления реконфигурации. В тёче0
ние этого времени под действием силы тяжести осуществляется поворот в. шарнире 7 на требуемый угол а, при этом центр тяжести части руки от второй половины 6 реконфигурируемого звена до рабочего органа 8 перемещается в нижнее положение. Далее фиксатор шарнира 7 фиксирует новое взаимное положение частей 5 и 6 реконфигурируемого звена, и манипулятор с новыми геометрическими параметрами готов к работе, в частности, к захвату объекта 12.
Предлагаемый способ позволяет осуществлять реконфигурацию в ограниченных пространствах, при различных конфигура5 циях, без использования специальных упорных элементов и без управления движением при реконфигурации. Расширяются технические возможности манипулятора, появляется возможность осуществлять ре0 конфигурацию в разных областях рабочего .пространства, а не только в зоне нахождения упорного элемента.
Ф dp мула и з о б р е т е н и я Способ реконфигурации многозвенного манипулятора, заключающийся в расфикса ции шарнира, связывающего два смежных звена, изменении их взаимного положения и фиксации этих звеньев в новом положении, отличающийся тем, что, с целью упрощения способа, изменение взаимного положения звеньев осуществляется за счет воздействия на одно из звеньев его силы тяжести, устанавливая при этом звенья перед расфиксацией шарнира в соответствующее положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ реконфигурации многоподвижного звена манипулятора | 1988 |
|
SU1678603A1 |
| Реконфигурируемый робототехнический комплекс | 1990 |
|
SU1812096A1 |
| СПОСОБ ПРОГРАММИРОВАНИЯ РЕКОНФИГУРИРУЕМОГО МАНИПУЛЯТОРА | 1991 |
|
RU2043914C1 |
| Манипулятор | 1990 |
|
SU1805029A1 |
| ПОДВОДНЫЙ РЕКОНФИГУРИРУЕМЫЙ МОДУЛЬНЫЙ РОБОТ | 2022 |
|
RU2772503C1 |
| Манипулятор | 1983 |
|
SU1171307A1 |
| Способ и система для определения по меньшей мере одного свойства манипулятора | 2014 |
|
RU2672654C2 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
Использование: в управлении манипуляторами. Сущность изобретения: манипулятору придают необходимое положение, затем расфиксируют шарнир, связывающий два звена. Одно из звеньев принимает под .действием силы тяжести соответствующее положение, которое фиксируют шарниром. 1 ил.
ч -ft Ј
| Манипулятор | 1986 |
|
SU1549741A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
