Изобретение относится к машиностроению, конкретно к конструкциям манипуляторов промышленных роботов.
Цель изобретения - расширение технологических возможностей.
Изобретение поясняется чертежами.
На фиг.1 показан манипуляторе начальный момент реконфигурации; на фиг.2 - то же, в конечный момент реконфигурации.
Манипулятор содержит основание 1, кинематически связанные звенья 2,3, а также последнее звено, состоящее из двух частей 4 и 5. Реконфигурирующий элемент состоит из двух звеньев 6 и 7, первое из которых закреплено на основании 1, а второе имеет возможность фиксации относительно рабочего органа (схвата) 8, для чего на части 7 могут быть выполнены, например, углубления по форме губок схвата 8. Звенья 6 и 7 реконфигурирующего элемента связаны шарниром 9, а части 4 и 5 реконфигурируе- мого последнего звена - шарниром 10 с фиксатором 11.
Устройство работает следующим образом..
Манипулятор выполняет заданные технологическим процессом операции, при этом взаимное положение частей 4 и 5 последнего звена зафиксировано фиксатором 11. Для изменения параметров (реконфигурации) последнего звена манипулятор принимает.положение, при котором углубления части 7 реконфигурирующего элемента оказываются между губками схвата 8 (фиг.1). Далее губки схвата 8 смыкаются, фиксируя взаимное положение рабочего органа 8 от0
5
0
5
0
5
носительно звена 7 реконфигурирующего элемента. На фиксатор 11 подается сигнал на расфиксацию взаимного положения частей 4 и 5 последнего звена. Перемещением звеньев 2 и 3 осуществляется изменение положения последнего сочленения (между звеном 3 и последним звеном) относительно звена 6 реконфигурирующего элемента, при этом за счет вращений в шарнирах 9 и 10 изменяется конфигурация последнего звена (фиг.2). Новое взаимное положение частей 4 и 5 последнего звена фиксируется фиксатором 11, губки схвата 8 размыкаются, после чего манипулятор с измененными параметрами последнего звена готов к продолжению работьк
Формула изобретения Манипулятор, установленный на основании и содержащий, по крайней мере, три кинематически связанных звена, одно из которых состоит, по крайней мере, из двух частей, имеющих возможность относительного перемещения и фиксации взаимного .положения, пЈи этом на последнем звене закреплен рабочий орган, причем на основании установлен- реконфигурирующий элемент, имеющий возможность контакта и фиксации на рабочем органе, отличающийся тем, что, с целью расширения технологических возможностей, реконфигурирующий элемент выполнен из двух шар- нирно соединенных звеньев, одно из которых закреплено на основании, а другое имеет возможность фиксации на рабочем органе.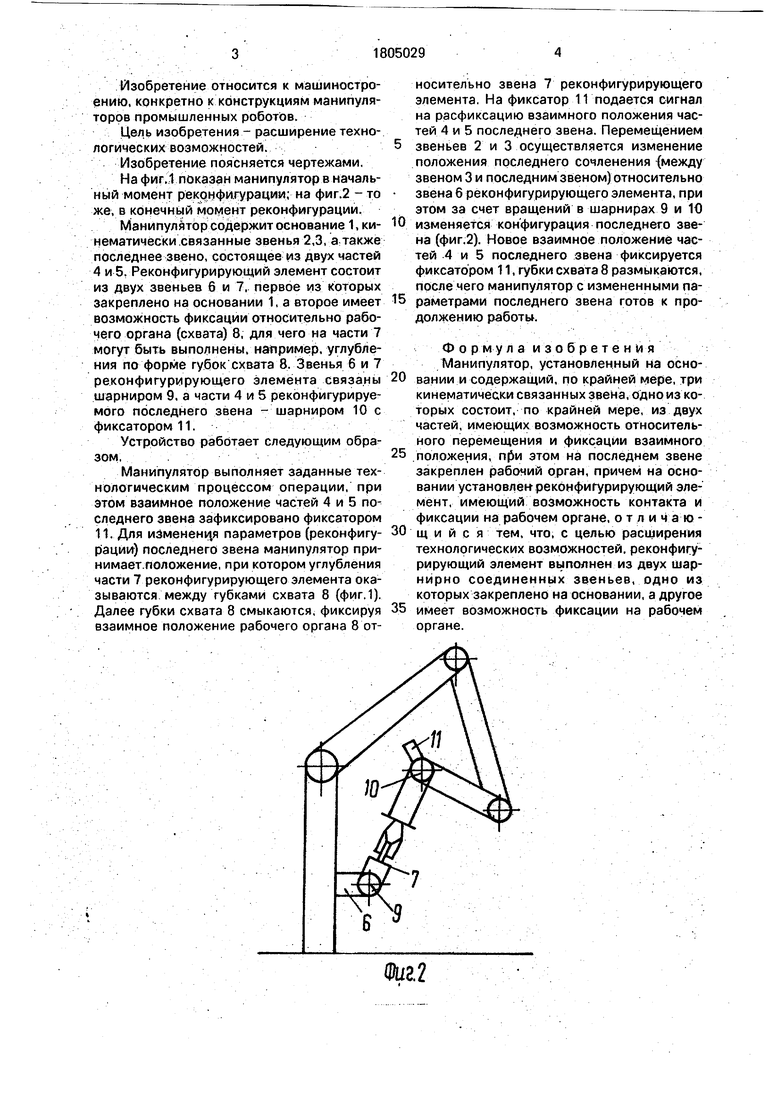
| название | год | авторы | номер документа |
|---|---|---|---|
| Реконфигурируемый робототехнический комплекс | 1990 |
|
SU1812096A1 |
| Способ реконфигурации многоподвижного звена манипулятора | 1988 |
|
SU1678603A1 |
| Способ реконфигурации многозвенного манипулятора | 1990 |
|
SU1812098A1 |
| СПОСОБ ПРОГРАММИРОВАНИЯ РЕКОНФИГУРИРУЕМОГО МАНИПУЛЯТОРА | 1991 |
|
RU2043914C1 |
| Устройство для перемещения объектов в рабочую зону | 1983 |
|
SU1122503A1 |
| МАНИПУЛЯТОР РОБОТА | 2015 |
|
RU2616317C1 |
| Манипулятор | 1988 |
|
SU1627400A1 |
| Схват манипулятора | 1983 |
|
SU1104018A1 |
| ПОДВОДНЫЙ РЕКОНФИГУРИРУЕМЫЙ МОДУЛЬНЫЙ РОБОТ | 2022 |
|
RU2772503C1 |
| СХВАТ ЗАДАЮЩЕГО ОРГАНА МАНИПУЛЯТОРА | 1972 |
|
SU426804A1 |
Использование: в конструкциях манипуляторов. Сущность изобретения: схват 8 за- хватывает одну из частей упорного 2 элемента, фиксатор расфиксирует взаимное положение частей 4 и 5 последнего звена; после чего движением звеньев 2 и 3 изменяется положение последнего сочленения относительно упорного элемента. При этом за счет поворотов в шарнире упорного элемента и в шарнире последнего звена изменяется взаимное положение частей 4 и 5, а следовательно и форма, и параметры последнего звена. Новое взаимное положение частей 4 и 5 последнего звена фиксируется шарниром. 2 ил.
| Способ реконфигурации многоподвижного звена манипулятора | 1988 |
|
SU1678603A1 |
