Изобретение относится к машиностроению, а более конкретно к робототехнике.
Цель изобретения - расширение технологических возможностей за счет обеспече- ния возможности осуществления реконфигурации в разных зонах рабочего пространства и расширение диапазона изменения параметров реконфигурируемого звена.
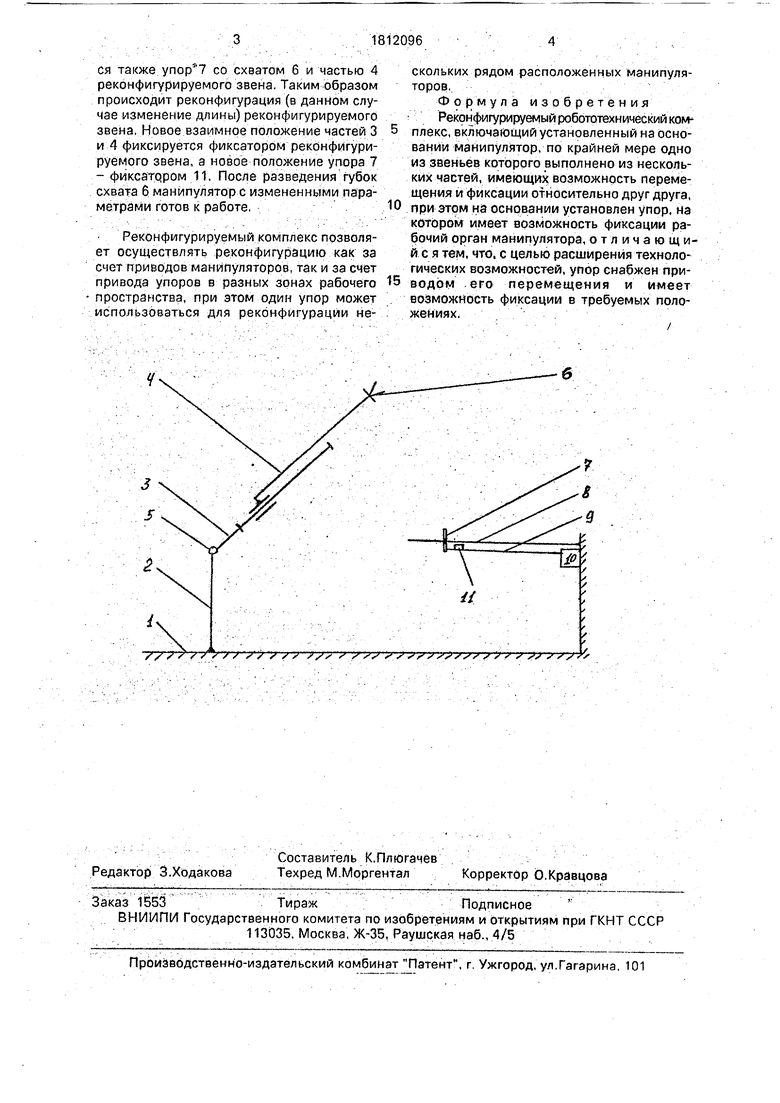
На чертеже представлен вариант кинематической схемы устройства.
Манипулятор комплекса содержит неподвижно закрепленное на основании 1 звено 2, связанное шарнирным соединением 5 с реконфигурируемым звеном, состоящим из двух частей 3 и 4, выполненных с возможностью линейного взаимного перемещения. Взаимное положение частей 3 и 4 фиксируется фиксатором реконфигурируемого звена, на части 4 реконфигурируемого звена установлен рабочий орган (схват) 6. Упор 7 расположен в рабочей зоне манипулятора с возможностью захвата его схватом
6. а также с возможностью перемещения, вдоль направляющей 8, неподвижно закрепленной относительно основания 1.
Посредством штока 9 упор 7 связан с приводом 10 его перемещения и снабжен фиксатором 11 положения штока 9 и упора
7. закрепленным на направляющей 8.
Устройство работает следующим образом.
Поворотом в сочленении 5 манипулятору придается конфигурация, при которой упор 7 оказывается между губками схвата 6. Губки схвата 6 сжимаются, фиксируя положение схвата 6 на упоре 7. Подаются сигналы на расфиксацию взаимного положения частей 3 и 4 реконфигурируемого звена и на фиксатор 11, в результате чего обеспечивается возможность взаимной перемещения частей 3 и 4 реконфигурируемого звена,, а также перемещения штока 9 и упора 7 со .схватом6 вдоль направляющей 8. Привод 10 осуществляет перемещение на требуемое расстояние.штока 9, при этом перемещает00
1
о
ся также со схватом 6 и частью 4 реконфигурируемого звена. Таким образом происходит реконфигурация (в данном случае изменение длины) реконфигурируемого звена. Новое взаимное положение частей 3 и 4 фиксируется фиксатором реконфигурируемого звена, а новое положение упора 7 - фйксатрром 11. После разведения губок схвата 6 манипулятор с измененными параметрами готов к работе.
Реконфигурируемый комплекс позволяет осуществлять реконфигурацию как за счет приводов манипуляторов, так и за счет привода упоров в разных зонах рабочего пространства, при этом один упор может использоваться для реконфигурации не0
5
скольких рядом расположенных манипуляторов..
Формула изобретения Реконфигурируемый робототехнический ком плекс, включающий установленный на основании манипулятор, по крайней мере одно из звеньев которого выполнено из нескольких частей, имеющих возможность перемещения и фиксации относительно друг друга, при этом на основании установлен упор, на котором имеет возможность фиксации рабочий орган манипулятора, отличающийся тем, что. с целью расширения технологических возможностей, упор снабжен приводом его перемещения и имеет возможность фиксации в требуемых положениях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ реконфигурации многозвенного манипулятора | 1990 |
|
SU1812098A1 |
| Манипулятор | 1990 |
|
SU1805029A1 |
| Способ реконфигурации многоподвижного звена манипулятора | 1988 |
|
SU1678603A1 |
| СПОСОБ ПРОГРАММИРОВАНИЯ РЕКОНФИГУРИРУЕМОГО МАНИПУЛЯТОРА | 1991 |
|
RU2043914C1 |
| Манипулятор | 1988 |
|
SU1710337A1 |
| Схват промышленного робота | 1986 |
|
SU1308464A1 |
| Устройство для перемещения объектов в рабочую зону | 1983 |
|
SU1122503A1 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
| Схват манипулятора | 1985 |
|
SU1337252A1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
Использование: в робототехнике. Сущность изобретения: манипулятор схватом захватывает упорный элемент. Расфиксируется взаимное положение частей реконфигурируемого звена манипулятора, фиксатор расфиксирует положение штока относительно закрепленной на основании направляющей. Привод перемещает на необходимое расстояние шток с упорным элементом, при этом за счет жёсткого контакта схвата с упорным элементом происходит удлинение реконфигурируемого звена. После окончания реконфигурации новое взаимное положение частей фиксируется фиксатором реконфигурируемого звена. 1 ил.
| Способ реконфигурации многоподвижного звена манипулятора | 1988 |
|
SU1678603A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
| ь | |||
