Изобретение относится к машиностро ению и может быть использовано для проведения сборочных операций в гибких производственных системах.
Целью изобретения является расшире-- ние технологических возможностей за счет управляемого принудительного перемещения детали относительно захватных элементов.
На фиг.1 изображено устройство, общий вид; на фиг.2 - разрез в нижней части корпуса захватного устройства; на фиг.З - то же, вид снизу; на фиг.4 - первый этап движения; на фиг.5 - соответственно, второй, третий, четвертый этапы движения; на фиг.6 - процесс касания детали с базовой поверхностью.
Захватное устройство состоит из корпуса 1 с отверстием 2 для подачи сжатого воздуха в пневмоцилиндр 3, шток 4 в виде конуса. В корпусе 1 закреплены захватные рычаги в виде лапок 5, лапки сжимаются пружинами 6. Лапки 5 полые, в них располагаются пьезокерамические вибраторы 7 осевого перемещения. Пьезокерамические вибраторы 8 радиального перемещения расположены в нижней части корпуса 1. Шток 4 подпружинен относительно корпуса пружиной 9. К нижней части корпуса 1 закреплены три датчика положения 10. Собираемая деталь 11.
Устройство работает следующим образом.
Через отверстие 2 в пневмоцилиндр подается сжатый воздух, в результате чего поршень со штоком 4 .перемещается вниз, разжимая лапки 5. Захватное устройство опускается, деталь попадает в зону захватных элементов. После этого прекращается подача воздуха, в пневмоцилиндр, в результате чего пружина 9 возвращает в исходное положение шток 4. Лапки 5 под действием пружин 6 зажимают деталь 11. В результате зажима возникает перекос детали относительно базовой поверхности.
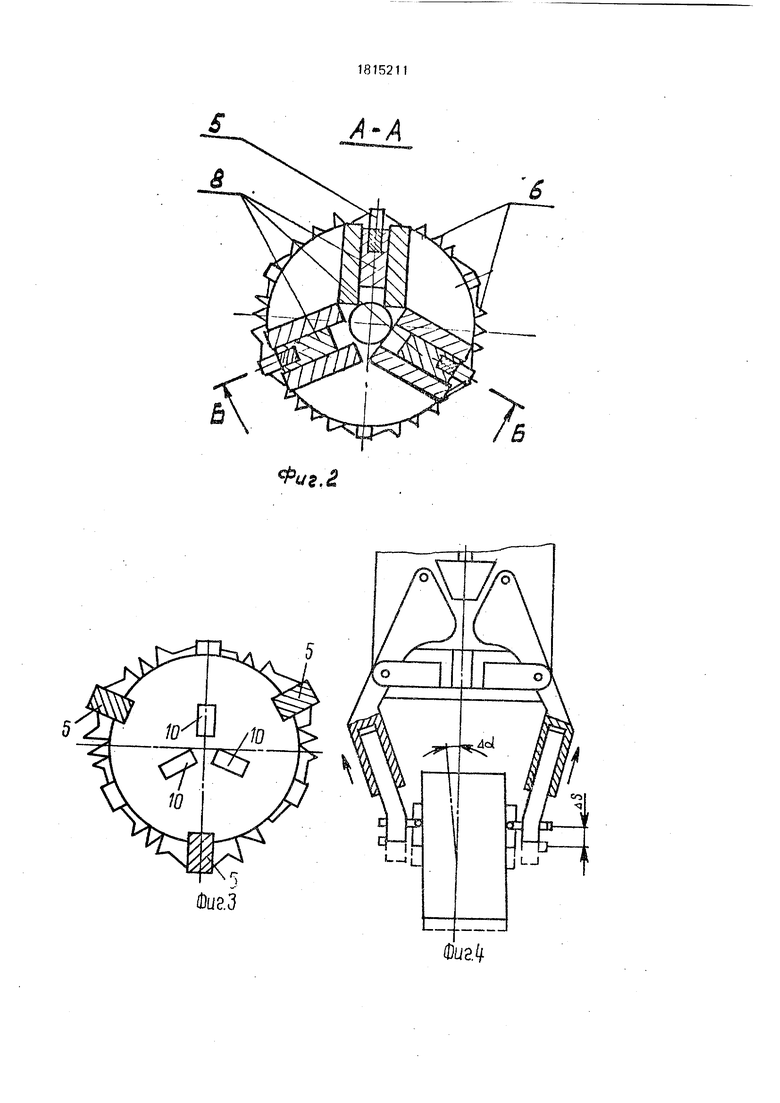
Автокомпенсация этой погрешности осуществляется следующим образом. Вибраторы 7 будут перемещаться вверх с деталью 11 на величину (+ AS). После
окончания движения вверх срабатывают вибраторы 8, разжимая лапки 5, освобождая деталь 11. Вибраторы 7 опускаются вниз и тем самым перехватывая деталь 11 ниже предыдущего положения на величину (- Д5)
(фиг.5). Из этого микроперемещения будет складываться принудительное движение детали. В момент касания о базовую поверхность деталь будет находиться под углом Да к базовой поверхности (фиг.6). Деталь
коснулась базовой поверхности одной точкой К1, прекращается поступательное движение детали вверх. После чего начинается вращательное движение до касания базовой поверхности точками К2, КЗ. Момент
касания базовой поверхности в точках регистрируется датчиками положения 10(фиг.6, 2). .
Формула и з о б.р е т е н и я
Захватное устройство, содержащее установленный на руке манипулятора корпус, смонтированный в нем привод в виде пнев- моцилиндра, кинематически связанный с закрепленными на оси подпружиненными
захватными рычагами с зажимными губками, при этом захватные рычаги смонтирова- ны под углом к вертикальной оси устройства, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено пьезокерамиче- скими вибраторами, одни из которых установлены на корпусе перпендикулярно оси устройства, причем оси захватных рычагов смонтированы на этих вибраторах, при
этом каждый захватный рычаг выполнен составным из двух частей, в одной из которых выполнена осевая проточка, в которой расположен один из вибраторов, на котором смонтирована другая часть захватного рычага, несущая зажимную губку.
1123181
Фиг5
Базовая подерхность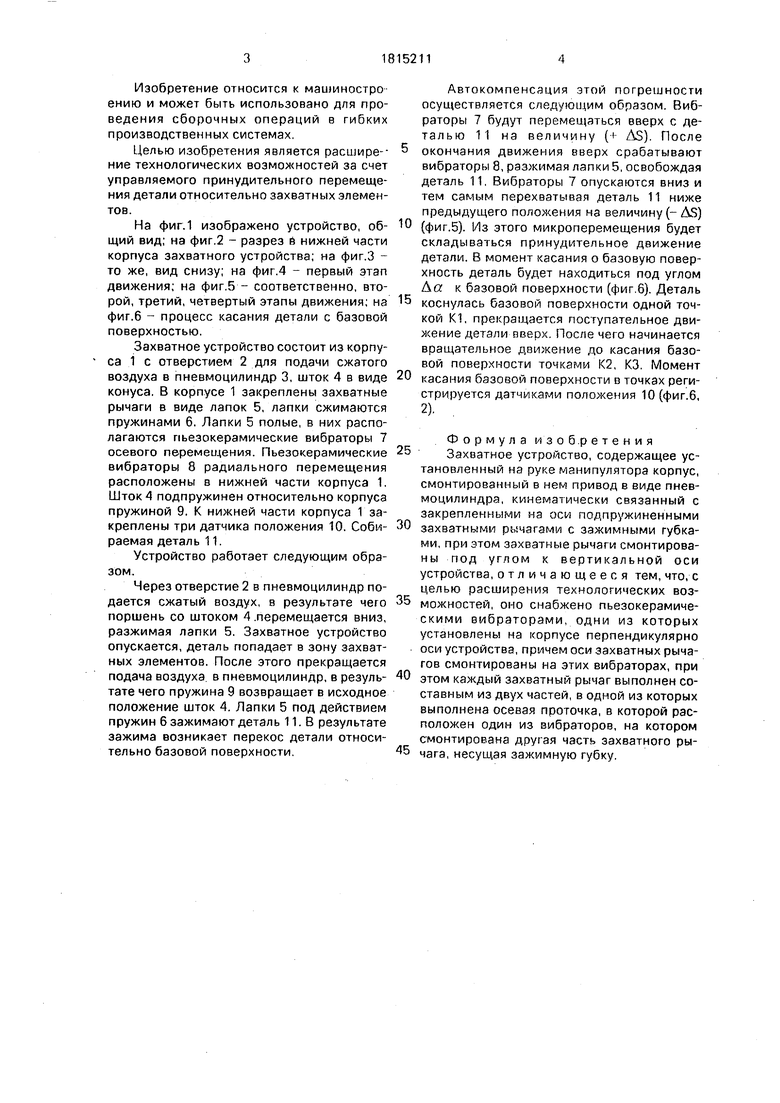
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1990 |
|
SU1761463A1 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| РОТОРНАЯ УСТАНОВКА ДЛЯ НАНЕСЕНИЯ ГОРЯЧИХ ПОКРЫТИЙ | 1992 |
|
RU2049147C1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Захватное устройство | 1985 |
|
SU1316814A1 |
| Захватное устройство | 1987 |
|
SU1404433A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
Использование: в машиностроении, может быть использовано для проведения сборочных операций в гибких производственных системах. Сущность изобретения: в автокомпенсации погрешностей ориентации деталей относительно схвата. Корпус 1 захватного устройства устанавливают на руке манипулятора. В каче6 б стве привода используют пневмоцилиндр 3. К корпусу крепятся захватные рычаги, подпружиненные относительно корпуса, выполненные составными из двух частей, в одной из которых выполнена осевая проточка, в которой расположены пьезокерамиче- ские вибраторы, на которых смонтирована другая часть захватного рычага, несущая зажимную губку. В нижней части корпуса расположены пьезокерамические вибраторы 8 перпендикулярно вертикальной оси корпуса, Автокомпенсация погрешностей ориентации деталей относительно схвата осуществляется вибраторами 7, которые перемещаются вверх с деталью 11, а также вибраторами 8, обеспечивающими вращательное движение детали. Момент касания детали базовой поверхности регистрируется датчиками положения 10. 6 ил. г С
К2
//////////////л////////
V
ъ
| Челпанов И.Б | |||
| и Колпашников С.Н | |||
| Схваты промышленных роботов | |||
| Л.: Машиностроение, 1989, с | |||
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
