фиг2
Изобретение относится к машиностроению, более конкретно к устройствам для захвата и транспортирования деталей, имеющих форму прямоугольного параллелепипеда, и может быть использовано в захватных органах роботов-манипуляторов.
Целью изобретения является расширение технологических возможностей.
На фиг. 1 и 2 изображено струйное захватное устройство.
Струйное захватное устройство содержит полый корпус 1 с отверстием 2 для подвода сжатого воздуха, вставку 3, закрепленную винтами 4 в корпусе, захватываемую деталь 5.
Струйное захватное устройство работает следующим образом.
При подаче сжатого воздуха в отверстие 2 корпуса 1 под вставкой 3 создается избыточное давление, воздух устремляется в за- зор, сформированный боковой поверхностью вставки 3 и стенками корпуса 1. Воздушный поток, имея большую скорость, создает разрежение под вставкой 3. При попадании детали 5 в зону разряжения происходит захват последней за счет того, что нижний торец вставки 3 выполнен сферическим, что обеспечивает наличие над
плоскостью захватываемой детали 5 зоны отрицательного давления. Таким образом, истекающий воздушный поток не воздействует на поверхность захватываемой детали 5 отталкивающе, а способствует лишь созданию над деталью разряжения, что приво; дит к увеличению грузоподъемности. Сферическая торцевая поверхность вставки 3 обеспечивает наличие над захватываемой деталью 5 зоны разряжения.
Формула изобретения
1. Струйное захватное устройство, содержащее полый корпус, открытый со стороны рабочего торца, при этом в центральной части другого торца выполнено сквозное отверстие, соединяющее полость корпуса с источником сжатого воздуха, отличающееся тем, что, с целью расширения технологических возможностей, в полости корпуса соосно ему закреплена с зазором вставка со сферической торцовой рабочей поверхностью, при этом второй торец вставки выполнен плоским и расположен перпендикулярно продольной оси корпуса.
2. Устройство по п. 1,отличающее- с я тем, что корпус и вставка выполнены прямоугольными в поперечном сечении, 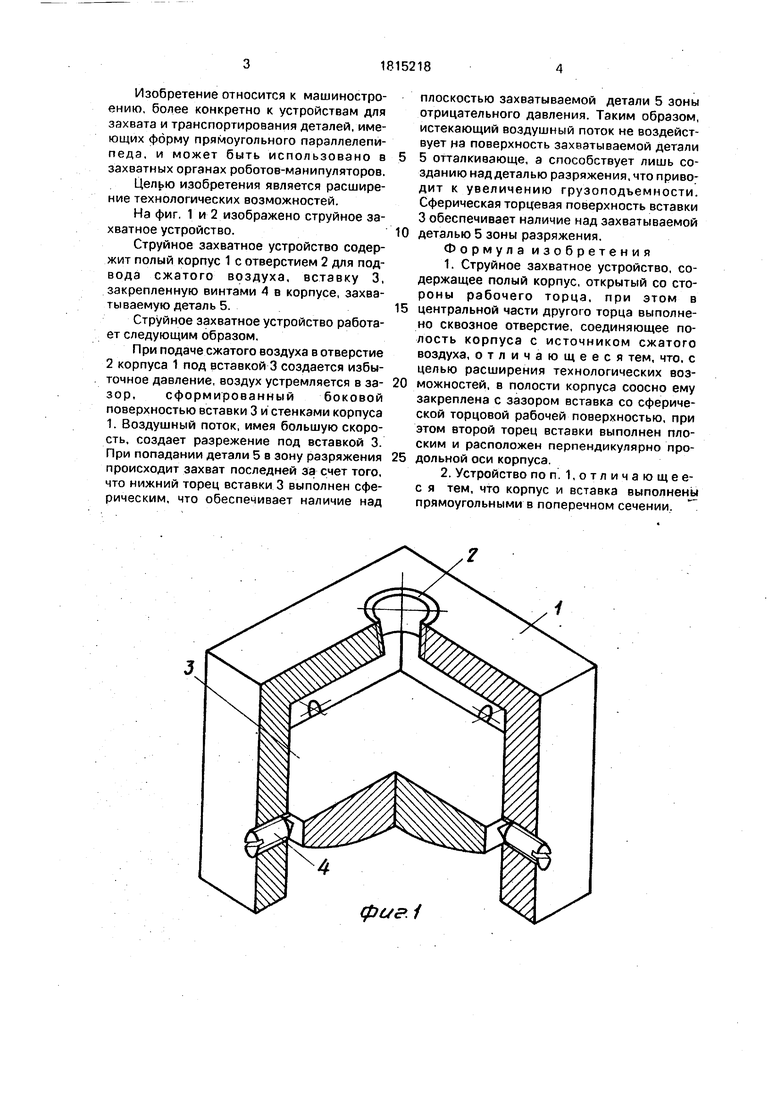
| название | год | авторы | номер документа |
|---|---|---|---|
| Струйное захватное устройство | 1990 |
|
SU1779585A1 |
| Захват манипулятора | 1988 |
|
SU1794644A1 |
| Способ извлечения деталей из кассеты и устройство для его осуществления | 1989 |
|
SU1773680A1 |
| Пневматический захват | 1977 |
|
SU632634A1 |
| Схват робота | 1983 |
|
SU1117205A1 |
| Вакуумное захватное устройство | 1988 |
|
SU1623937A1 |
| Пневматический захват | 1983 |
|
SU1098793A1 |
| Захватная головка | 1986 |
|
SU1323377A1 |
| Захватное устройство для мягких деталей | 1991 |
|
SU1779583A1 |
| СТРУЙНЫЙ ЗАХВАТ | 1995 |
|
RU2090352C1 |
Использование: для захвата и транспортирования деталей, имеющих форму прямоугольного параллелепипеда, и в захватных органах роботов-манипуляторов. Сущность изобретения: воздух подается в отверстие 2 корпуса 1 и устремляется в зазор, сформированный боковой поверхностью вставки 3 и стенками корпуса 1. Нижняя поверхность вставки 3 выполнена в виде сферы , что обеспечивает наличие над захватываемой деталью 5 зоны разряжения. При попадании детали 5 в зону разряжения происходит ее захват. 1 з.п.ф-лы, 2 ил.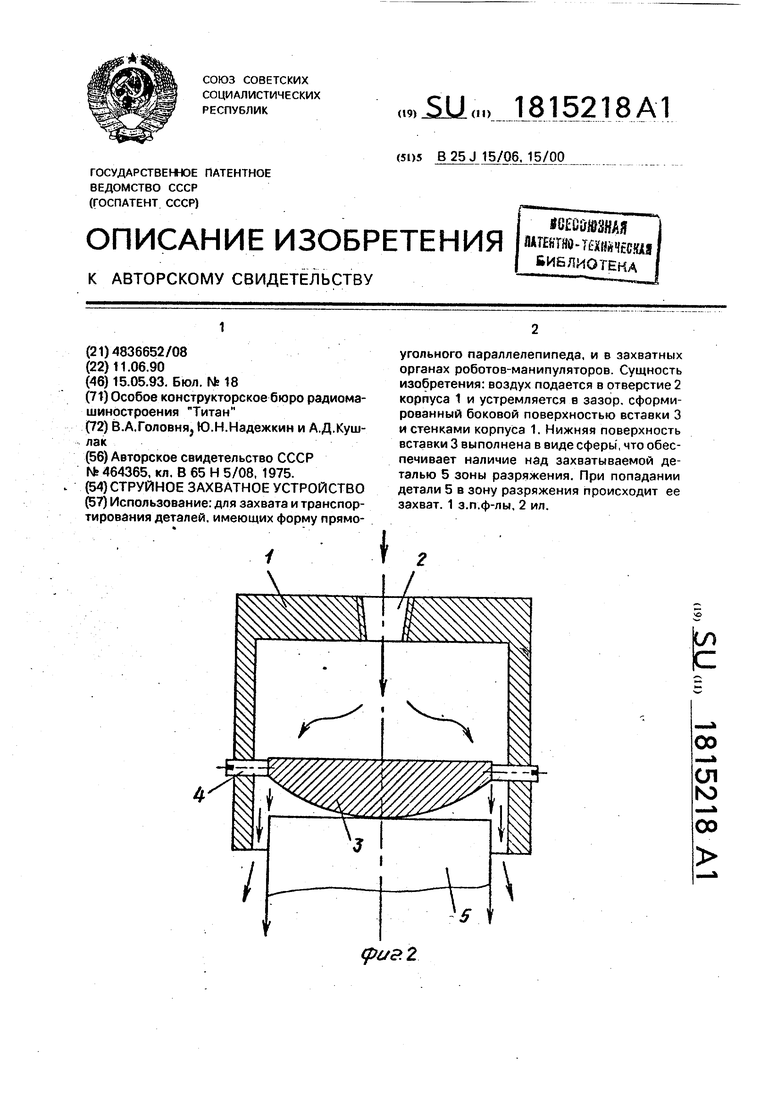
| Присоска для отделения листового материала от стопы | 1972 |
|
SU464365A1 |
