QD Од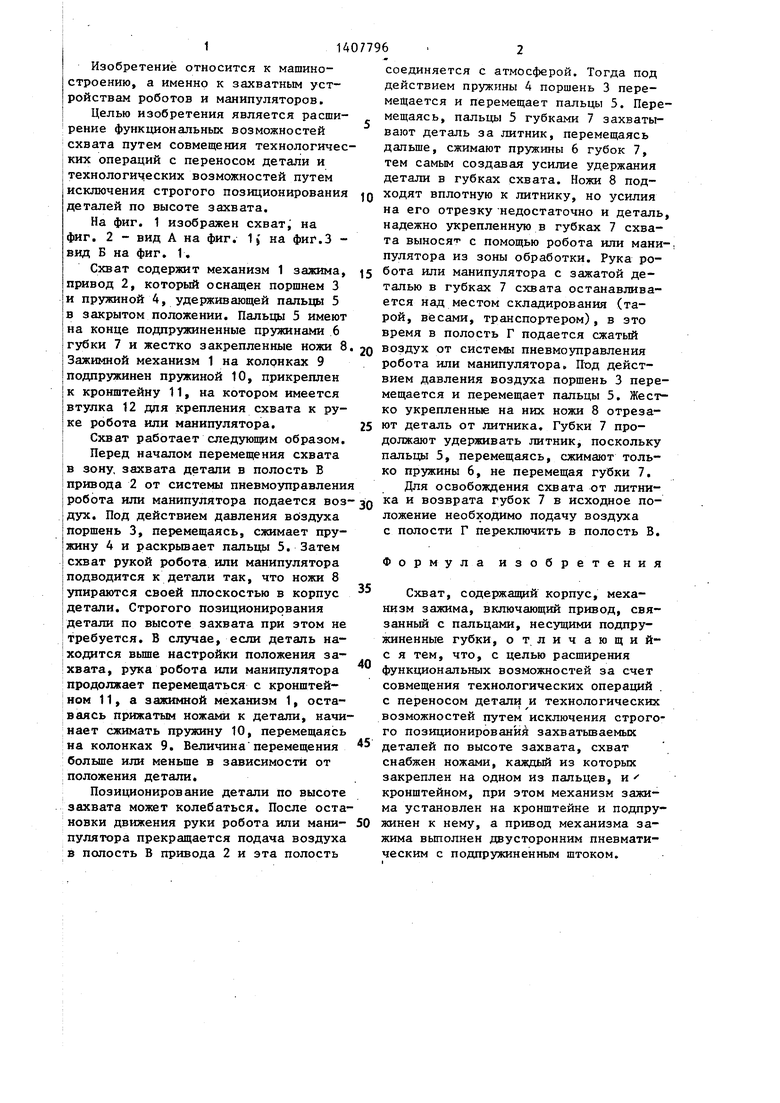
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1977 |
|
SU633726A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| Схват манипулятора | 1987 |
|
SU1537522A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2374064C1 |
| Очувствленный схват робота | 1986 |
|
SU1366392A1 |
| Манипулирующее устройство | 1985 |
|
SU1342722A1 |
Изобретение относится к области машиностроения, а именно к захватным устройствам роботов и манипуляторов. Целью изобретения является расширение функциональных возможностей схвата путем совмещения технологических операций с переносом детали и технологических возможностей путем исключения строгого позиционирования деталей по высоте захвата. Схват содержит механизм 1 зажима. включающий привод 2, пальцы 5 с подпружиненными губками 7 и ножи 8. Механизм 1 установлен на кронштейне 11 при помощи колонок 9 и подпружинен к нему. Схват подводится к детали таким образом, чтобы ножи 8 упирались своей плоскостью в корпус детали. Если деталь вьше или ниже настройки положения захвата, рука робота перемещается кронштейном 11, а меха.низм зажима 1, оставаясь прижатым ножами к детали, сжимает пружину 10 и перемещается на колонках 9. После переноса детали из зоны обработки в зону складирования поршень привода 2 под действием давления сжатого воздуха g перемещает пальцы 5. Жестко укреплен- чые на них ножи 8 отрезают деталь Q/ от литника. Губки 7 продолжают удерживать литник, так как пальцы 5 перемещаясь, сжимают пружины губок 7 не сдвигая их. 3 ил.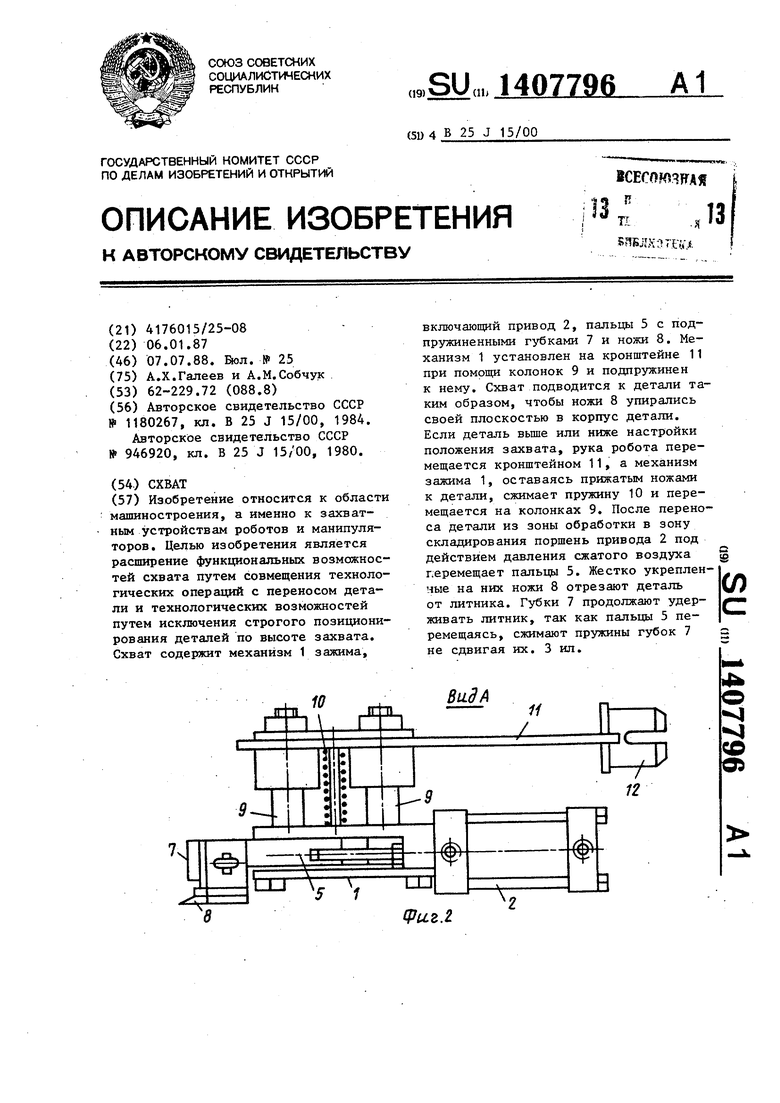
Т
fpuz.Z
11407796
Изобретение относится к машиностроению, а именно к захватным устройствам роботов и манипуляторов.
Целью изобретения является расширение функциональных возможностей охвата путем совмещения технологических операций с переносом детали и технологических возможностей путем исключения строгого позиционирования деталей по высоте захвата.
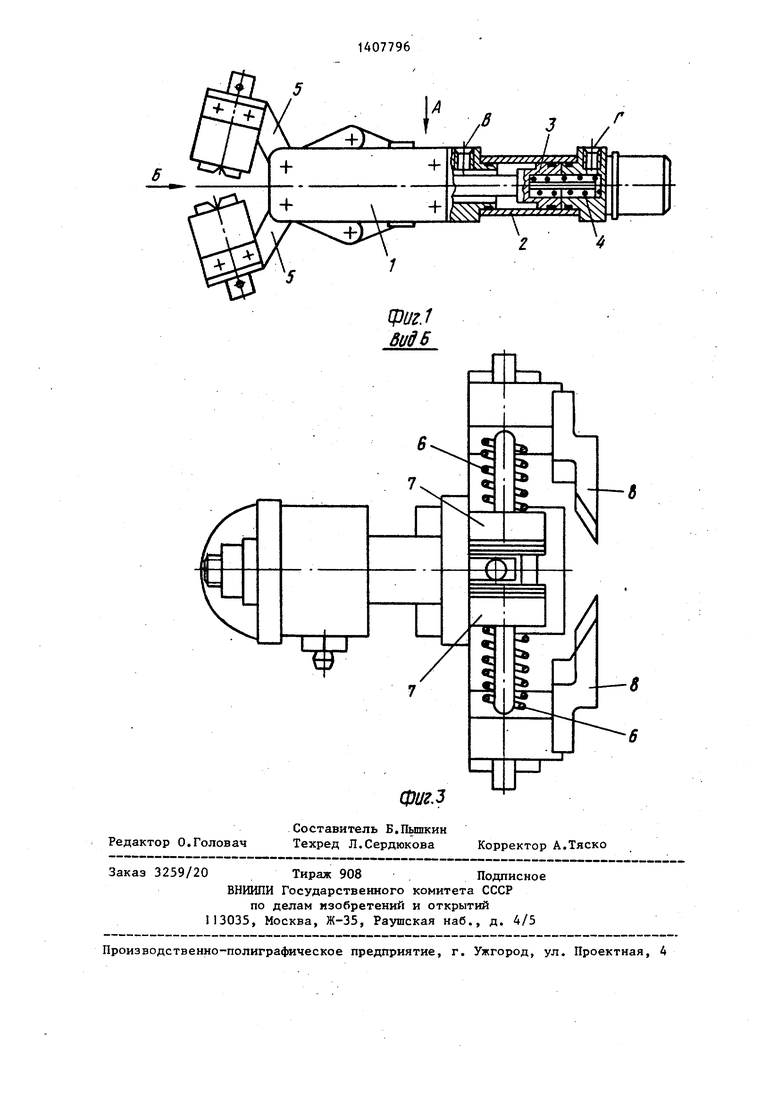
На фиг. 1 изображен охват, на фиг. 2 - вид А на фиг. 1) на фиГ.З - вид Б на фиг. 1,
Схват содержит механизм 1 зажима, привод 2, который оснащен поршнем 3 и прутшной 4, удерживающей пальцы 5 в закрытом положении. Пальцы 5 имеют на конце подпружиненные пружинами 6 губки 7 и жестко закрепленные ножи 8. Зажимной механизм 1 на колонках 9 подпружинен пружиной 10, прикреплен к кронштейну 11, на котором имеется втулка 12 для крепления охвата к руке робота или манипулятора.
Схват работает следующим образом.
Перед началом перемещения охвата в зону, захвата детали в полость В привода 2 от системы пневмоуправления
соединяется с атмосферой. Тогда под действием пружины 4 поршень 3 перемещается и перемещает пальцы 5. Перемещаясь, пальцы 5 губками 7 захватывают деталь за литник, перемещаясь дальше, сжимают пружины 6 губок 7, тем самым создавая усилие удержания детали в губках схвата. Ножи 8 подJQ ходят вплотную к литнику, но усилия на его отрезку недостаточно и деталь надежно укрепленную в губках 7 схвата ВЫНОСЯ с помощью робота или манипулятора из зоны обработки. Рука ро15 бота или манипулятора с зажатой деталью в губках 7 схвата останавливается над местом складирования (тарой, весами, транспортером), в это время в полость Г подается сжатый
20 воздух от системы пневмоуправления робота или манипулятора. Пюд действием давления воздуха поршень 3 перемещается и перемещает пальцы 5. Жестко укрепленные на них ножи 8 отреза25 ют деталь от литника. Губки 7 продолжают удерживать литник, поокольку пальцы 5, перемещаясь, сжимают только пружины 6, не перемещая губки 7. Для освобождения схвата от литниробота или манипулятора подается воз- зо возврата губок 7 в исходное по35
40
дух. Под действием давления воздуха поршень 3, перемещаясь, сжимает пружину 4 и раскрьшает пальцы 5. Затем охват рукой робота или манипулятора подводитоя к детали так, что ножи 8 упираются своей плоскостью в корпус детали. Строгого позиционирования детали по высоте захвата при зтом не iтребуется. В случае, если деталь на- |ходится выше настройки положения захвата, рука робота или манипулятора продолжает перемещаться о кронштейном 11, а зажимной механизм 1, оота- ваяоь прижатым ножами к детали, начинает ожимать пружину 10, перемещаясь на колонках 9. Величина перемещения болыпе или меньше в зависимости от положения детали.
Позиционирование детали по высоте захвата может колебатьоя. После остановки движения руки робота или мани- 50 пулятора прекращается подача воздуха в полость В привода 2 и эта полость
45
ложение необходимо подачу воздуха с полости Г переключить в полость В.
Формула изобретения
Схват, содержащий корпус, механизм зажима, включающий привод, овя- занный о пальцами, несущими подпружиненные губки, отличающий- с я тем, что, с целью расширения функциональных возможностей за счет совмещения технологических операций . с переносом детали и технологических возможностей путем исключения строгого позиционирования захватьшаемых деталей по высоте захвата, охват снабжен ножами, каждый из которых закреплен на одном из пальцев, и кронштейном, при этом механизм зажима установлен на кронштейне и подпружинен к нему, а привод механизма зажима выполнен двусторонним пневматическим с подпружиненным штоком.
соединяется с атмосферой. Тогда под действием пружины 4 поршень 3 перемещается и перемещает пальцы 5. Перемещаясь, пальцы 5 губками 7 захватывают деталь за литник, перемещаясь дальше, сжимают пружины 6 губок 7, тем самым создавая усилие удержания детали в губках схвата. Ножи 8 подходят вплотную к литнику, но усилия на его отрезку недостаточно и деталь, надежно укрепленную в губках 7 схвата ВЫНОСЯ с помощью робота или мани, пулятора из зоны обработки. Рука робота или манипулятора с зажатой деталью в губках 7 схвата останавливается над местом складирования (тарой, весами, транспортером), в это время в полость Г подается сжатый
воздух от системы пневмоуправления робота или манипулятора. Пюд действием давления воздуха поршень 3 перемещается и перемещает пальцы 5. Жестко укрепленные на них ножи 8 отрезают деталь от литника. Губки 7 продолжают удерживать литник, поокольку пальцы 5, перемещаясь, сжимают только пружины 6, не перемещая губки 7. Для освобождения схвата от литни возврата губок 7 в исходное по
ложение необходимо подачу воздуха с полости Г переключить в полость В.
Формула изобретения
Схват, содержащий корпус, механизм зажима, включающий привод, овя- занный о пальцами, несущими подпружиненные губки, отличающий- с я тем, что, с целью расширения функциональных возможностей за счет совмещения технологических операций . с переносом детали и технологических возможностей путем исключения строгого позиционирования захватьшаемых деталей по высоте захвата, охват снабжен ножами, каждый из которых закреплен на одном из пальцев, и кронштейном, при этом механизм зажима установлен на кронштейне и подпружинен к нему, а привод механизма зажима выполнен двусторонним пневматическим с подпружиненным штоком.
.5
-LJ
| Схват | 1984 |
|
SU1180267A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Захват | 1980 |
|
SU946920A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
