Известны краиовые вилочные захваты, содержащие подвижную относительно их рамы траверсу и прижимиой механизм, удерл.нвающий груз на вилах усилием, создаваемым при нодъеме захвата.
В отлнчие от известных захватов такого тина нредлагаемый захват более надежен и удобен в работе. Достигнуто это тем, что прижимной механизм выполнен в виде шарнирно прикрепленных к раме двуплечих рычагов, унравляемых с помощью тяг, которые соединены с короткими плечами рычагов и с траверсой и фиксируются в нерабочем положении с помощью автоматически действующих защелок, связывающих траверсу с длинными плечами рычагов прижимного механизма. Каждая защелка состоит из корпуса коробчатого сечения со звездочкой и ползуна также коробчатого сечепия, перемещаемого в корпусе для воздействия на звездочку. Звездочка может входить в окна, сделанные в стенках корпуса и ползуна, предотвращая их относительное перемещение, а следовательно, и перемещение рычагов.
В тягах, соединяющих траверсу с короткими плечами рычагов, имеются прорези, в которых могут перемещаться пальцы траверсы.
щарнирно соединенных частей, а корпуса защелок прикреплены к длипным плечам рычагов с помощью шарниров, которые обеспечивают поворот вил относительно траверсы в
том же направлении, что и щарниры, соединяющие части тяг.
Для визуального наблюдения за работой защелок к их корпусам прикреплены поворотные флажки, управляемые упорами, прикрепленными к ползунам защелок.
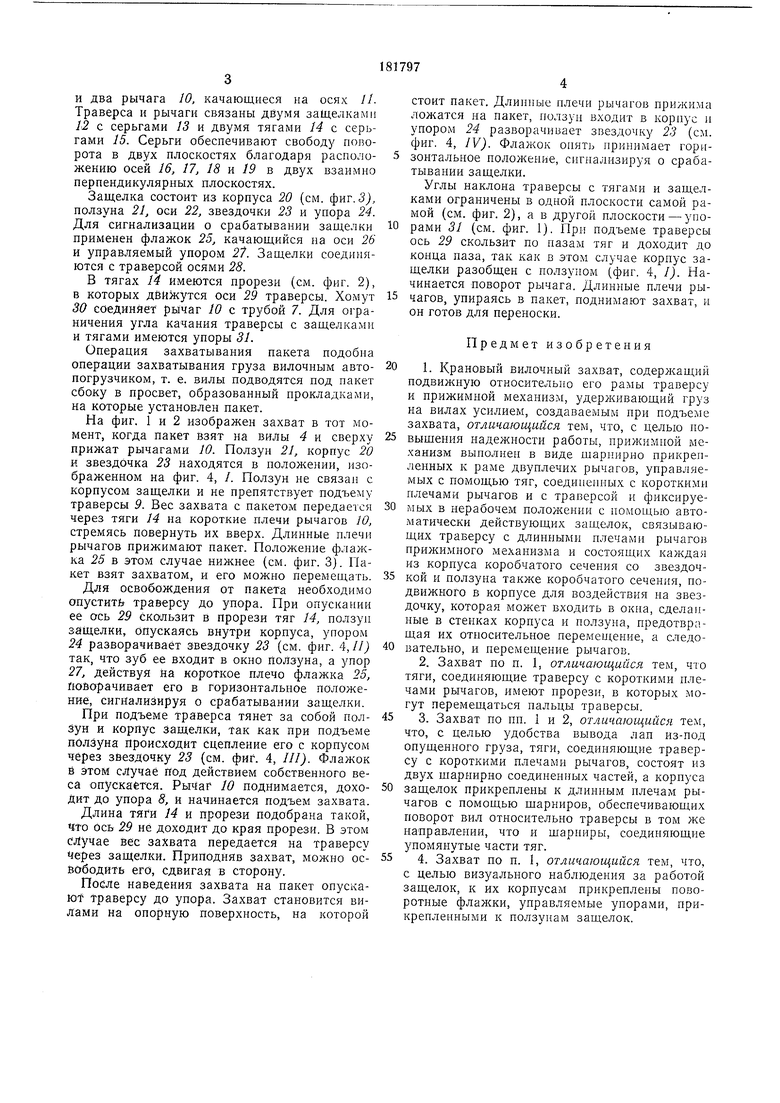
На фиг. 1 и 2 изображен захват в рабочем положении, с пакетом на вилах (рычаги прижимают пакет, траверса находится в верхнем пололсепии); на фиг. 3 - защелка с флажком
(ползун защелки находится в верхнем положении, флажок опущен); на фиг. 4 - положения защелки при работе захвата.
Захват состоит из рамы с вилами и прижимного механизма. Рама включает собственно раму / в виде двух или более Г-образных несущих балок, соединенных двумя горизонтальными связями, в одну из которых загружается балласт-противовес 2. К раме на осях 3 подвещень вилы 4, положение которых
регулируется при помощи винтов 5.
Для удобства работы с захватом на раме крепится поручень 6. Кроме того, на раме закреплены две трубы 7 и два упора 8, ограничивающие угол поворота рычагов прижима.
и два рычага 10, качающиеся на осях //. Траверса и рычаги связаны двумя за1целками 12 с серьгами 13 и двумя тягами 14 с серьгами 15. Серьги обеспечивают свободу поворота в двух плоскостях благодаря расположению осей 16, 17, 18 к 19 в двух взаимно перпендикулярных плоскостях.
Защелка состоит из корпуса 20 (см. фиг. 3j, ползуна 21, оси 22, звездочки 23 и упора 24. Для сигнализации о срабатывании защелки применен флажок 25, качающийся на оси 26 и управляемый упором 2. Защелки соединяются с траверсой осями 28.
В тягах 14 имеются прорези (см. фиг. 2), в которых движутся оси 29 траверсы. Хомут 30 соединяет рычаг 10 с трубой 7. Для ограничения угла качания траверсы с защелками и тягами имеются упоры 31.
Операция захватывания пакета подобна операции захватывания груза вилочным автопогрузчиком, т. е. вилы подводятся под пакет сбоку в просвет, образованный прокладками, на которые установлен пакет.
На фиг. 1 и 2 изображен захват в тот момент, когда пакет взят на вилы 4 и сверху прижат рычагами 10. Ползун 21, корпус 20 и звездочка 23 находятся в положении, изображенном на фиг. 4, /. Ползун не связан с корпусом защелки и не препятствует подъему траверсы 9. Вес захвата с пакетом передается через тяги 14 на короткие плечи рычагов 10, стремясь повернуть их вверх. Длинные плечи рычагов прижимают пакет. Положение флажка 25 в этом случае нижнее (см. фиг. 3). Пакет взят захватом, и его можно перемещать.
Для освобождения от пакета необходимо опустить траверсу до упора. При опускании ее ось 29 скользит в прорези тяг 14, ползун , опускаясь внутри корпуса, упором 24 разворачивает звездочку 23 (см. фиг. 4,//j так, что зуб ее входит в окно ползуна, а упор 27, действуя на короткое плечо флажка 25, поворачивает его в горизонтальное положение, сигнализируя о срабатывании защелки.
При подъеме траверса тянет за собой ползун и корпус защелки, так как при подъеме ползуна происходит сцепление его с корпусом через звездочку 23 (см. фйг. 4, 1П). Флажок и этом случае йод действием собственного веса опускается. Рычаг 10 поднимается, доходит до упора 8, и начинается подъем захвата.
Длина тяги 14 и прорези подобрана такой, что ось 29 не доходит до края прорези. В этом случае вес захвата передается на траверсу {брез защелки. Приподняв захват, можно освободить его, сдвигая в сторону.
После наведения захвата на пакет опускают траверсу до упора. Захват становится вилами на опорную поверхность, на которой
стоит пакет. Длинные плечи рычагов прижима ложатся на пакет, ползун входнт в корпус н упором 24 разворачивает звездочку 23 (см. фиг. 4, IV). Флажок опять принимает горизонтальное положение, сигналнзируя о срабатывании защелки.
Углы наклона траверсы с тягами и защелками ограничены в одной плоскости самой рамой (см. фиг. 2), а в другой плоскости - упорами 31 (см. фиг. 1). При подъеме траверсы ось 29 скользит по пазам тяг и доходит до конца наза, так как в этом случае корнус защелки разобщен с ползуном (фиг. 4, I). Начинается поворот рычага. Длинные плечи рычагов, упираясь в пакет, поднимают захват, и он готов для переноски.
Предмет изобретения
1. Крановый вилочный захват, содержащий подвижную относительно его рамы траверсу и нрижимной механизм, удерживающий груз на вилах усилием, создаваемым нри подъеме захвата, отличающийся тем, что, с целью новыщения надел ности работы, прижимной механизм выполнен в виде шарннрно прикрепленных к раме двуплечих рычагов, управляемых с помощью тяг, соединенных с короткими плечами рычагов и с траверсой н фиксируемых в нерабочем положении с помощью автоматически действующих защелок, связывающих траверсу с длинными нлечами рычагов прижимного механизма и состоящих каждая из корпуса коробчатого сечення со звездочкой и ползуна также коробчатого сечення, подвижного в корпусе для воздействия на звездочку, которая может входить в окна, сделанные в стенках корпуса н ползуна, предотвращая их относительное перемен;ение, а следовательно, и перемещение рычагов.
2. Захват по п. 1, отличающийся тем, что тяги, соединяющие траверсу с короткими плечами рычагов, имеют прорези, в которых могут перемещаться пальцы траверсы.
3. Захват по пп. 1 и 2, отличающийся тем, что, с целью удобства вывода лап из-под опущенного груза, тяги, соединяющие траверсу с короткими нлечами рычагов, состоят из двух щарнирно соединенных частей, а корпуса
защелок прикреплены к длинным плечам рычагов с помощью щарниров, обеспечивающих поворот вил относительно траверсы в том же нацравленни, что и шарниры, соединяющие уномянутые части тяг.
4. Захват по п. 1, отличающийся тем, что, с целью визуального наблюдения за работой защелок, к их корпусам прикреплены поворотные флажки, управляемые упорами, прикрепленныдш к ползунам защелок.
29
3
2в
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для грузов | 1979 |
|
SU839981A1 |
| Клещевой захват | 1977 |
|
SU703467A1 |
| Грузозахватное устройство | 1990 |
|
SU1785989A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ | 1966 |
|
SU178465A1 |
| Устройство для открывания переплетов | 1981 |
|
SU1006671A1 |
| Автоматизированный склад | 1980 |
|
SU992344A1 |
| Крановый вилочный захват для грузов | 1979 |
|
SU772967A1 |
| Крановый вилочный захват | 1978 |
|
SU779256A1 |
| КОНВЕЙЕР ДЛЯ РАЗМЕЩЕНИЯ И ПОДАЧИ ВЫСТРЕЛОВ | 1999 |
|
RU2165573C2 |
| Устройство для сортировки лесоматериалов | 1983 |
|
SU1143674A1 |

и 23 2i
