Изобретение относится к обработке металлов резанием, а именно к устройствам для перемещения, загрузки, установки, поворачивания, крепления или разгрузки обрабатываемых изделий, и может быть использовано в виде роботогехнических узлов специально приспособленных для автоматических или п о п у а в т о м а т in e с к и х станков.
Цель изобретения - расширение Функциональных возможностей.
На фиг.1 представлен автооперэюр, установленный у фрезерпо-центровального станка, вид сбоку; на фиг.2 - то же, со стороны навесного каркаса.
Автооператор содержит стойку 1, на верхнем конце которой установлен упорный подшипник 2 с закрепленными на его наружных стенках кронштейнами 3, удерживающими горизонтальную стрелу в виде втулки 4 с сведенными в нее выдвижным поворотным пальцем 5, на свободном конце которого жестко закреплен радиальный поводок 6, с выполненной на нем подвеской для неполноповоротного лопастного пнев- юдвигателя 7. Поворотный вал 8 пневмод- вигателя 7 соединен випочным хомутом 9 с цилиндром 10. Оси выдвижного пальца 5 и поворотного вала 8 установлены параллельно. Со штоком 11 цилиндра 10 соединен механизм боковых перемещений в виде узла полозков 12, в который снизу введен ползун 13 с прикрепленным к нему малым цилиндром 14 рычажного схвлта 15. На станок (показан тонкими линиями) навешивается поворотный каркас 16 с быстродействующими зажимами, с загрузочной 17 и разгрузочной 18 направляющими, на которых первая наклонена в сторону станка, а вторая - от станка.
Автоопераюр работает следующим образом.
Упорный подшипник 2 с кронштейнами
3настойке 1 поворачивают так чтобы втулка
4с выдвижным пальцем 5 были ориентированы в сторону расположения центров станка.
Положение выдвинутого пальца 5 во втулке 4 зависит от того, какой угол наклона выбирается для цилиндра 10, а соответственно этому положению цилиндра ведется настройка положения также радиального поводка 6. За счет перемещения выдвижного пальца 5 во втулке 4 отделяется от стойки
1 или приближается к ней цилиндр 10 вместе с радиальным поводком 6 и лопастным пневмодвигателем 7. После закрепления выдвижного пальца 5 во втулке 4 включают лопастной пневмодвигатель 7. Цилиндр 10,
жестко соединенный с валом 8 с помощью вилочного хомуга 9, поворачивают относительно оси вала 8, которая установлена параллельно оси выдвижного пальца 5. При этих поворотах цилиндра 10 рычажный
схват 15 подводят к детали на загрузочной направляющей 17, когда срабатывает малый цилиндр 14, разводя и смыкая схват 15, удерживающий деталь. При повороте цилиндра 10 в другую сторону обеспечивают
его остановку в таком положении, когда ось детали соосна с осью центра станка. Перемещение детали вдоль оси центров станка осуществляется с помощью узла полозгов 12 и ползуна 13. Деталь закрепляется в центрах, схват разжимается, цилиндр отводится, а после обработки детали возвращается в только что оставленное положение, где схват снова берет теперь обработанную деталь, Цилиндр 10 поворачивают до положения разгрузки, где схвзт 15 разжимается и готовая деталь скатывается по разгрузочной направляющей 18,
Формула изобретения
1, Автооператор, содержащий вертикальную стойку, горизонтальную стрелу, установленную с возможностью перемещения относительно вертикальной стойки, силовой цилиндр, на штоке которого расположен
схват, установленный с возможностью поворота в вертикальной плоскости, и привод поворота, отличающи и.с я тем, что, с целью расширения функциональных возможностей, силовой цилиндр со схватом установлен с возможностью поворота относительно дополнительно введенной оси, расположенной параллельно горизонтально стреле и жестко с ней связанной, при этом стрела установлена с возможностью
поворота относительно своей продольной оси.
2. Автооператор поп,1,отличающий- с я тем, что схват установлен с возможностью перемещения относительно корпуса
штока в направлении, перпендикулярном к его продольной оси.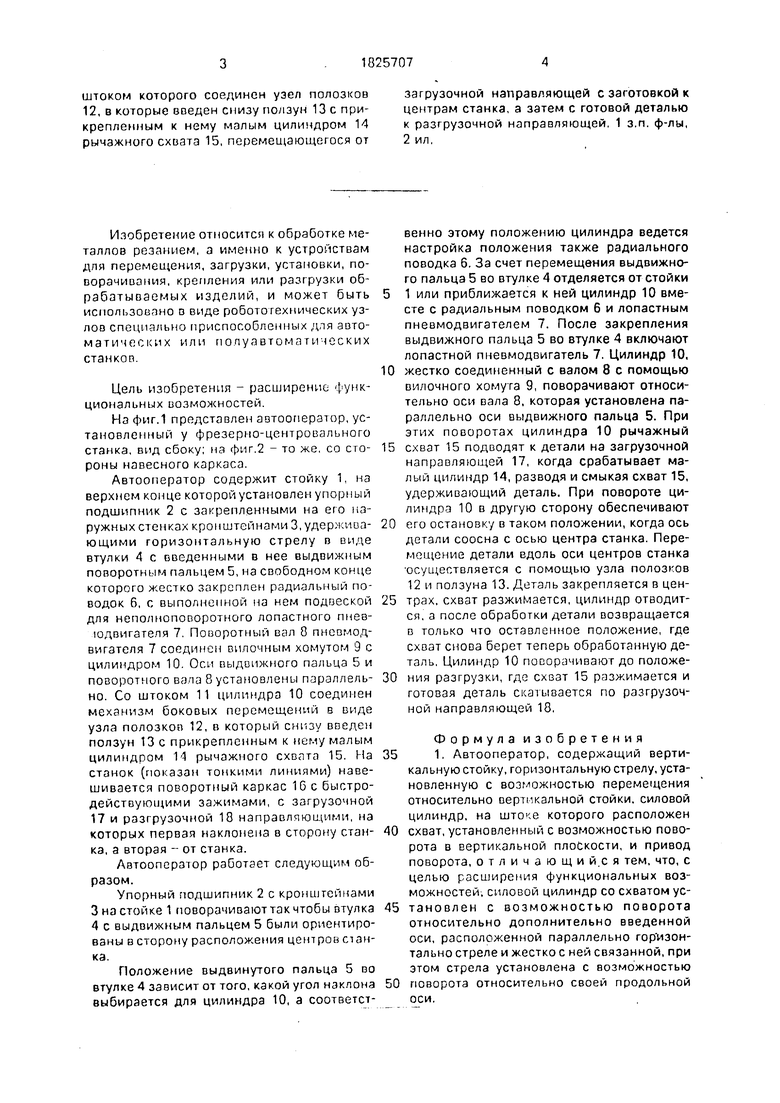
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1979 |
|
SU856749A1 |
| Автооператор | 1986 |
|
SU1379055A1 |
| Многопозиционный автооператор | 1988 |
|
SU1683969A1 |
| Автооператор | 1985 |
|
SU1283035A1 |
| Станок для шлифования плоских поверхностей деталей | 1988 |
|
SU1602710A1 |
| Автооператор | 1986 |
|
SU1335408A1 |
| Роторный станок для шлифования отверстий деталей | 1989 |
|
SU1660940A1 |
| Многоцелевой станок | 1989 |
|
SU1660937A1 |
| Устройство для загрузки металлорежущего станка | 1977 |
|
SU722732A1 |
| Многооперационный станок с ЧПУ | 1985 |
|
SU1305000A1 |
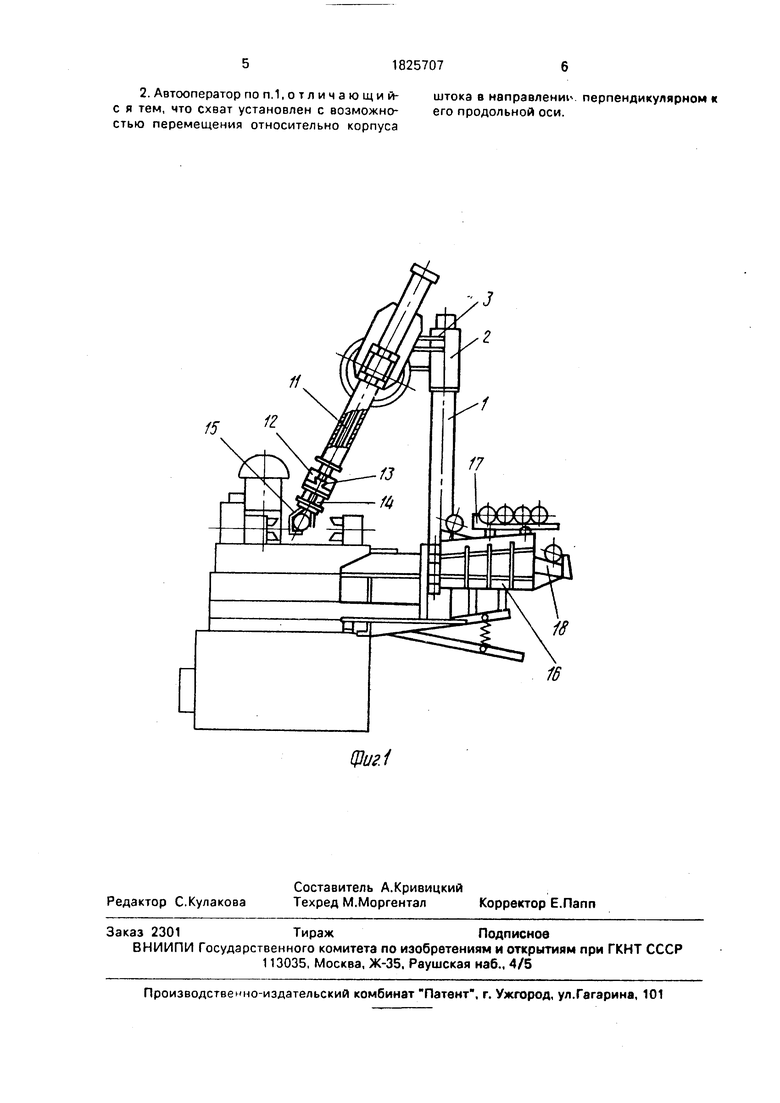
Использование: для перемещения, загрузки, установки, поворачивания, крепления или разгрузки обрабатываемых изделий. Автооператор содержит стойку 1 с упорным подшипником 2, несущим стрелу в виде втулки 4 и выдвижного пальца 5, на котором закреплен радиальный поводок 6 с подвеской для неполно-поворотного лопастного пневмодвигателя 7. Поворотный вал 8 пневмодвигателя вращает цилиндр 10. со
15
Щиг1
| Белянин П.Н, Промышленные роботы и их применение, М.: Машиностроение, 1983, с | |||
| ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1916 |
|
SU282A1 |
| Пылеочистительное устройство к трепальным машинам | 1923 |
|
SU196A1 |
