фиг.1
Изобретение относится к области машиностроения и может быть использовано для определения пространственного движения выходного звена манипуляторов при их испытаниях.
Цель изобретения - повышение точности устройства для определения движения выходного звена манипулятора.
На фиг.1 показан общий вид устройства; на фиг.2 - разрезы подвижного узла; на фиг.З - блок-схема измерительной части устройства.
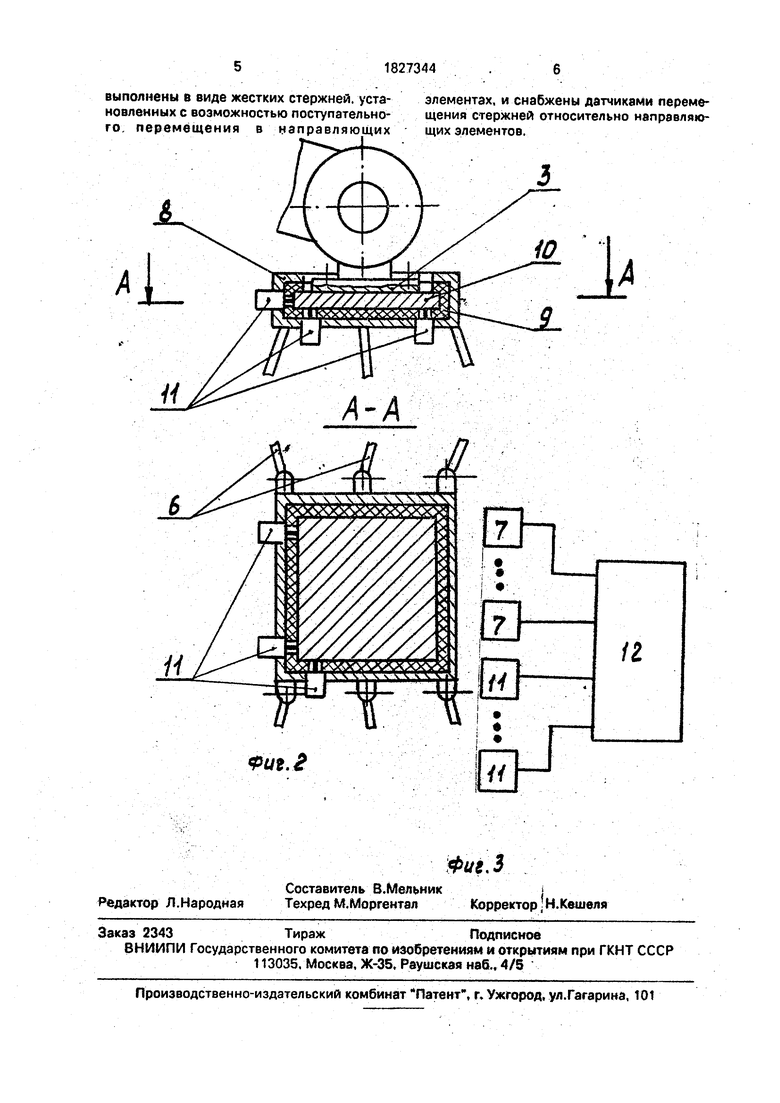
Устройство содержит основание 1, на котором установлен испытуемый манипулятор 2. На фланце 3 выходного звена манипулятора 2 закреплен подвижный узел 4, соединенный с основанием 1 шестью одно- координатными измерителями. Каждый од- нокоординатный измеритель состоит из направляющих элемента 5, шарнирно уста-, новленного на основании 1 и жесткого стержня б, установленного с возможностью осевого перемещения в направляющем элементе 5 и шарнирно соединенного своим концом с корпусом подвижного узла 4. Все измерители перемещения оснащены датчиками 7 перемещения стержней 6 относительно направляющих элементов 5. Каждый датчик 7 может быть выполнен, например, в виде инкрементальной линейки, корпус которой аакреплен на соответствующем направляющем элементе, а движок связан с соответствующим стержнем 6. Подвижный узел 4 состоит из корпуса 8, в котором на упруго-демпфирующем элементе 9, выпол- ненном, например, из губчатой резины, установлена измерительная плитка 10, жестко связанная с фланцем 3 выходного звена испытуемого манипулятора. В корпусе 8 расположены как минимум шесть чувствительных элементов 11, образующих измеритель относительного положения плитки 10 и корпуса 8. Выходы датчиков перемещений 7 и чувствительных элементов 11 подключены к входам вычислительно- регистрирующего блока 12, который может быть выполнен, например, на базе микро- ЭВМ.
Устройство работает следующим образом.
Оператор фиксирует начальное положение рабочего органа манипулятора и включает вычислительно-регистрирующий блок 12, затем запускает манипулятор на выполнение заданного движения. Во время исполнения заданной траектории движения фланец 3 вместе с подвижным узлом 4 будет описывать соответствующую траекторию движения относительно основания 1. При этом стержни 5 будут совершать перемеще
0
5
0
0
5 5 5
0
0
5
ния относительно направляющих элементов 5, величина этих перемещений измеряется датчиками 7. При ускорениях фланца 3 во время движения возникают деформации упруго-демпфирующего элемента 9 под действием сил и моментов инерции со стороны стержней 6. Изменение пространственного положения плитки. 10 относительно корпуса 8, возникающее при деформации упруго-демпфирующего элемента 9, измеряется чувствительными элементами 11. Информация с датчиков 7 и чувствительных элементов 11 поступает4в вычислительно-регистрирующий блок 12, в котором производится определение фактических координат положений фланца 3 на основе полученной информации с использованием метода l-координат З.
В результате деформаций упругоде- мпфирующего элемента 9 движение корпуса 8 отличается от движения фланца 3 в сторону уменьшения ускорений. Это приводит к сокращению инерционных сил и моментов в устройстве и, как следствие, к повышению точности определения пространственной траектории движения фланца за счет:
-уменьшения динамических деформаций элементов устройства;
-уменьшения динамических воздействий на манипулятор со стороны устройства.
Формула изобретения
1.Устройство для определения параметров движения выходного звена манипулятора, содержащее основание, манипулятор, подвижный узел, вычислительно-регистрирующий блок и шесть однокоординатных измерителей, установленных на основании и связанных с подвижным узлом и вычислительно-регистрирующим блоком, отличающееся тем, что, с целью повышения точности измерений, подвижный узел выполнен в виде корпуса и измерительной плитки, закрепленной на нем .посредством упругодемпфирующего элемента, при этом на корпусе дополнительно установлены по крайней мере шесть чувствительных элементов, имеющих возможность определения положения измерительной плитки относительно корпуса и соединенных с вычислительно-регистрирующим блоком, а измерительная плитка жестко закреплена на фланце выходного звена манипулятора, при этом однокоординатные измерители установлены на корпусе подвижного узла посредством шарнирного соединения,
2,Устройство поп.1,отличающее- с я тем, что однокоординатные измерители
выполнены в виде жестких стержней, установленных с возможностью поступательного перемещения в направляющих
элементах, и снабжены датчиками перемещения стержней относительно направляющих элементов.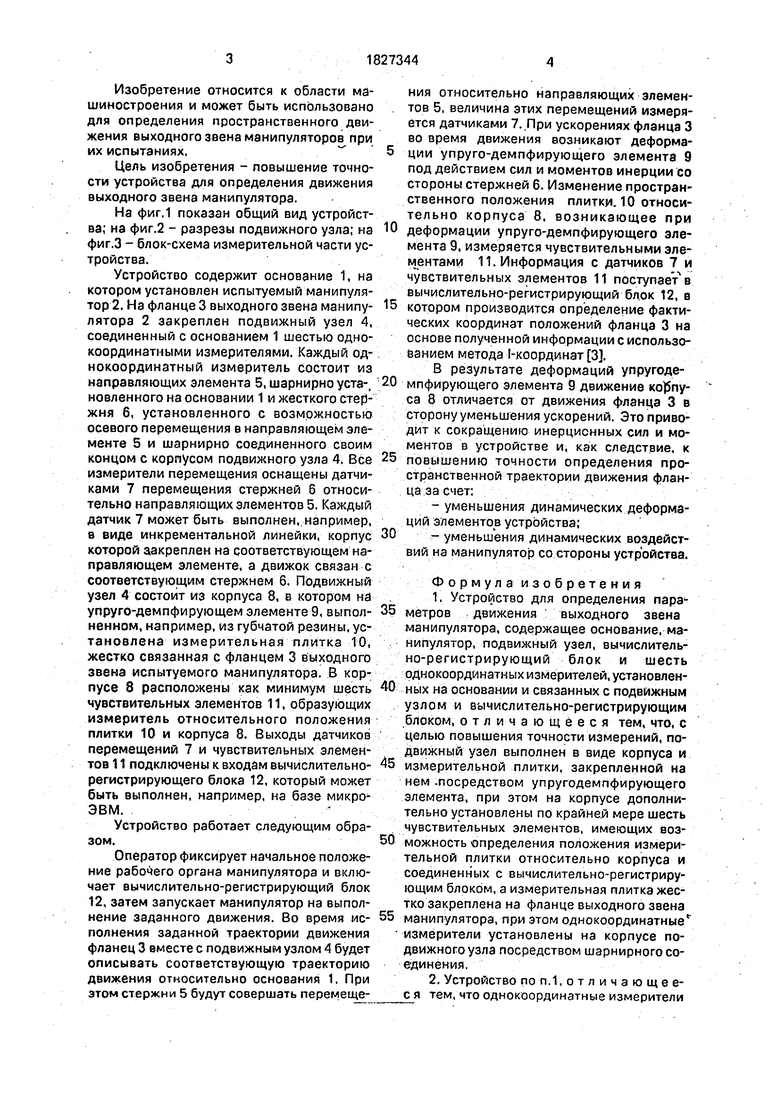
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| СПОСОБ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННОГО РОБОТА | 2003 |
|
RU2252862C1 |
| Стенд для испытания промышленных роботов-манипуляторов | 1987 |
|
SU1495114A1 |
| МАНИПУЛЯТОР "ЧЕРЕПАХА ПРОХОРОВА" (ВАРИАНТЫ), "КОЛЕСО ПРОХОРОВА", ФРИКЦИОННЫЙ КОМПАС | 1999 |
|
RU2234128C2 |
| ЭКСПЕРТНАЯ СИСТЕМА НА БАЗЕ МЕДИЦИНСКОГО МАНИПУЛЯЦИОННОГО РОБОТА ДЛЯ ТРАНСПЕДИКУЛЯРНОЙ ФИКСАЦИИ ПОЗВОНОЧНИКА | 2023 |
|
RU2833780C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННОГО РОБОТА | 2011 |
|
RU2472612C1 |
| МАНИПУЛЯТОР "ЧЕРЕПАХА ПРОХОРОВА" | 1999 |
|
RU2180134C2 |
| Шестикоординатный датчик нагрузки | 1982 |
|
SU1016713A1 |
| АДАПТИВНЫЙ МОБИЛЬНЫЙ ПРОСТРАНСТВЕННЫЙ РОБОТ-МАНИПУЛЯТОР И СПОСОБ ОРГАНИЗАЦИИ ДВИЖЕНИЙ И КОНТРОЛЯ ФИЗИКО-МЕХАНИЧЕСКИХ СВОЙСТВ И ГЕОМЕТРИЧЕСКОЙ ФОРМЫ КОНТАКТИРУЕМОЙ ПОВЕРХНОСТИ И ТРАЕКТОРИИ ПЕРЕМЕЩЕНИЯ С ЕГО ПОМОЩЬЮ | 2009 |
|
RU2424893C2 |
Использование: машиностроение, для определения параметров пространственного движения выходного звена манипулятора при его испытании. Сущность изобретения: устройство содержит основание 1, манипулятор 2. подвижный узел 4, вычислительно- регистрирующий блок, шесть однокоорди- натных измерителей. На. корпусе подвижного узла дополнительно установлены шесть чувствительных элементов. Од- нокоординатные измерители выполнены в виде жестких стержней 6, снабженных датчиками перемещений 7. При перемещении фланца 3 с подвижным узлом по заданной траектории стержни 6 перемещаются относительно направляющих элементов 5. Величина этого перемещения измеряется датчиками 7 и чувствительными элементами, информация с которых поступает в вычислительно-регистрирующий блок. 1 з.п. ф-лы, 3 ил. ГО со fc
Фиг. 2
Редактор Л.Народная
Составитель В.Мельник Техред М.Моргентал
Фиг.З
Корректор; НЖешеля
| L-координатное устройство для определения положения или перемещения объекта в пространстве | 1987 |
|
SU1519869A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
