Изобретение касается способа подачи тонкого пропитанного связующим невулканизированного полотна (листа) из минеральной ваты на принимающий конвейер и устройства, представляющего реализацию этого способа.
В предпочитаемом варианте реализации изобретения используется ранее изве стная система привода, придавая колебательному маятниковому конвейеру постоянную скорость движения в середине маятникового движения и синусоидально
соответственно снижающуюся и повышающуюся скорости в крайних положениях движения маятника. Период, имеющий постоянную скорость, может быть в диапазоне от 30 до- 60% всего размаха качания маятника. Постоянная скорость маятника в центральной зоне равна полностью или почти полностью выходной скорости первичного полотна. Это дает возможность маятнику располагаться ближе к принимающей поверхности, примерно наполовину расстояния, допускаемого шатунно-кривошипным
00
ы
Ј
ел
U5 СО
Ы
приводом, тем самым обеспечивая значительно лучшие укладку и фиксацию первичного полотна на принимающем конвейере.
В зонах вне фазы, имеющей постоянную скорость, маятник движется с синусоидально понижающейся соответственно и увеличивающейся скоростью, когда маятник производит свое маятниковое движение. По крайней мере в течение части движения с понижающейся и соответственно увеличивающейся скоростями в крайних положениях размаха качания маятника, выходной конец маятника выполнен с возможностью подниматься в конечной фазе движения маятника и опускаться в начальной фазе. Благодаря изменению высоты маятника в фазе замедления соответственно ускорения потенциальная энергия накапливается, соответственно разряжается, приводя к меньшим силам напрях ения, воздействующим на устройство, чем генерируемые в случае, когда выходной конец маятника описывает горизонтальную траекторию при полном размахе качания маятника.
Движение маятника, состоящее из центральной части, имеющей постоянную скорость, и двух крайних частей, имеющих замедляющую и ускоряющую скорости, соответственно образуется посредством бесконечной приводной цепи, движущихся по двум копланарным, отстоящим друг от друга цепным колесам, благодаря чему соединительная тяга соединяет маятник с подвиж- ной частью на приводной цепи. Центральное расстояние цепных колес соответствует части движения маятника, имеющей постоянную скорость, и половина окружности каждого колеса соответствует движению маятника, имеющего замедляющую и ускоряющую скорости.
Движение маятника, состоящее из центральной части, имеющей постоянную, скорость, и двух крайних частей, имеющих скорости замедления и ускорения, может также создаваться посредством, так называемой, передачи Фергюсона, в которой вращательное движение передается с помощью эллиптических зубчатых колес.
Выходной конец маятника может направляться так, чтобы двигаться вдоль раз- ных по форме траекторий в ходе маятникового движения. Самый простой вариант - это дугообразная траектория, благодаря чему маятник качается около стационарной точки опоры. В таком варианте маятник функционирует с большой точностью на выходных скоростях 200 м/мин. Это достигается благодаря тому факту, что выходной конец маятника может сближаться
очень близко с принимающим конвейером и ближе всего в средней точке всего размаха качания, в результате чего подаваемое первичное полотно может быть немедленно фиксировано в нижележащем поданном полотне и,таким образом, оставаться ненарушенным воздушными потоками, вы- зываемыми движением маятника. В крайних положениях движения маятника
нижний конец маятника поднимается около 0,1 раза выходной ширине, т.к. примерно 20 см при выходной ширине 200 см, то ведет к более точному положению в отношении сгибания кромок по причине меньшей петли
5 сгибания полотна из минеральной ваты. Другое преимущество этого варианта в том, что маятник может быть относительно коротким, например, от 0,7 до 1,0 раз кратный выходной ширине, т.е. от 140 до 200 см, что
0 ведет к низким маемоментам инерции и меньшим напряжениям в приводе. Помехи воздушного потока также снижаются благодаря более короткому маятнику.
В этом варианте маятник может регули5 роваться, чтобы сблизиться в своей самой близкой точке лишь в 5-ТО см над принимающим конвейером и тем самым фиксировать почти сразу поданное полотно в центральной зоне траектории. Это дает ват0 ное полотно, имеющее очень ровные кромки. При постоянной скорости выше 50% выходной ширины, которая составляет 200 См, и максимальном размахе качания маятника 80% и длина маятника 75% выходной
5 ширины, т.е. 150 см, маятник поднимается на 12%, т.е. на 24 см в крайних положениях. Другим предпочтительным вариантом реализации изобретения является тот, в котором маятник и его выходной конец выполнео ны с возможностью двигаться горизонтально с постоянной высотой над принимающим конвейером в центральной зоне размаха качания маятника и подниматься над ним в крайних положениях.
5 Подъемное движение может начаться в любой точке после средней точки движения маятника, но по крайней мере в течение фазы замедления маятника, тем самым давая возможность первичному полотну, кото0 рое подается с выходного конца маятника с первичной скоростью, иметь.достаточно пространства ниже выходного конца, который тогда движется с более низкой скоростью, чем выходная скорость первичного
5 полотна. Подъемное движение, таким образом, начинается как можно раньше после средней точки движения маятника; маятник и его выходной конец затем описывают непрерывную дугообразную линию, или, по крайней мере, в такой точке перед крайним
положением размаха качания маятника, что дает возможность иметь достаточно пространства ниже поднимающегося маятника для цикла накапливания, чтобы поставить под управление и образовать ровную кромку во время обратного движения.
Траектория, описываемая выходным концом может быть линейным подъемом, круглой, постепенно дугообразной линией или их различными комбинациями.
Посредством разных направляющих устройств маятник или его выходной конец принуждается отклоняться от естественного маятникового движения, имеющего круговую выходную траекторию. С момента, когда имеет место отклонение от естественного маятникового движения, точка колебания маятника должна быть вертикально .подвижной или радиус качания выходного конца должен быть переменным.
Выходная траектория, состоящая главным образом из горизонтальной части и требуемой дугообразной концевой части, может соответствовать рычагу, смонтированному на подшипниках в маятнике, который (рычаг) может содержать, например, нижний конец, который шарнирно смонтирован на подшипниках снаружи маятника, тем самым принуждая маятник описывать по существу горизонтальную траекторию. В течение этой части движения точка колебания маятника понижается/повышается. Точка колебания расположена таким образом, чтобы достигать останова или еще останова в положении, при котором маятник должен переходить в подъемное положение в самой наружной зоне размаха качания маятника, соответственно в понижающее движение в той же зоне в течение обратного движения. Монтаж рычага на подшипниках в маятнике выполнен таким образом, чтобы дать возможность маятнику колебаться относительно рычага на этой стадии, например, является средством вильчатого подшипника. Пружина соответственно может быть расположена между верхней частью соединительной тяги маятника и рычагом, направляющим положение высоты маятника, в результате чего силы ускорения и замедления частично уравновешиваются в крайних положениях маятника.
Движение маятника может также направляться с помощью, например, направляющей, расположенной симметрично относительно центральной оси, вдоль которой колесо на подшипниках.в маятнике, или скользящее тело расположены с возможностью движения. Траектория выходного конца тогда будет соответствовать форме направляющей. Высота направляющей над
выходным концом определяется оптимизацией геометрии и сил массы.
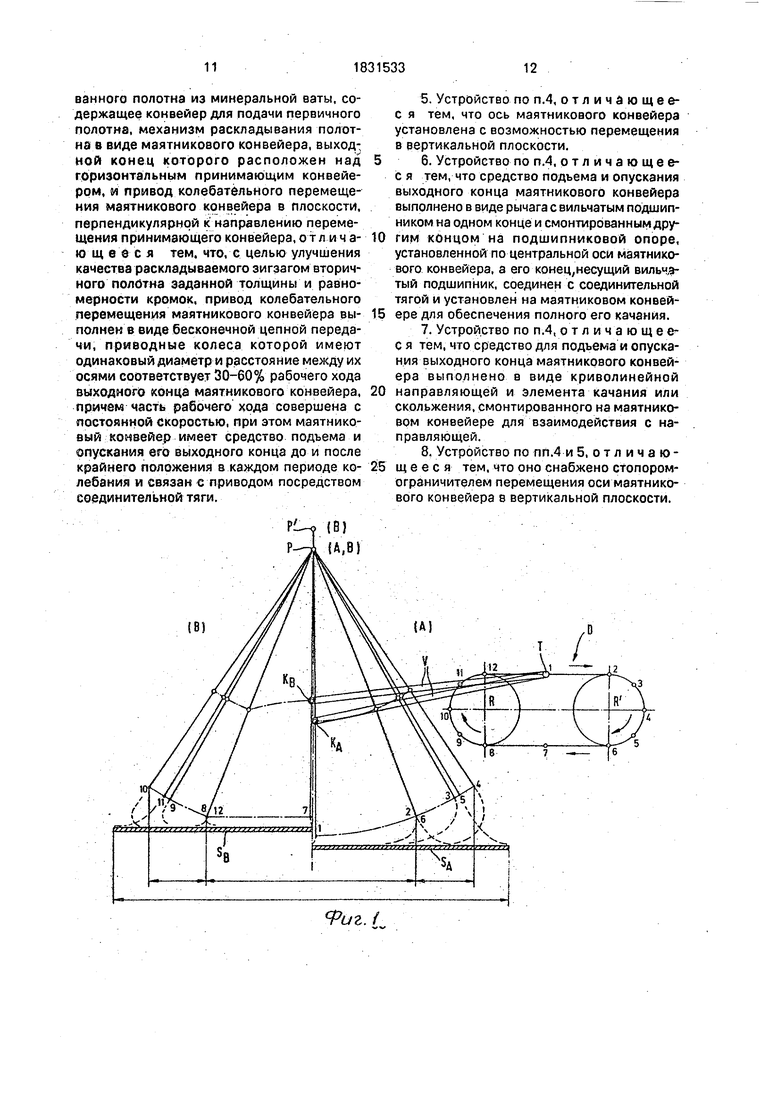
Точка колебания маятника альтернативно может быть стационарной, тогда как вы- 5 ходной конец может быть рэдиально подвижным относительно точки колебания. На фиг. 1 дан схематичный вид движения маятника двух предпочитаемых вариантов реализации; движение маятника на
0 постоянной скорости и затем на замедляющей и на ускоряющейся скорости, тогда как выходной конец маятника описывает круговую траекторию (А) соответственно при движении маятника на постоянной скорости и
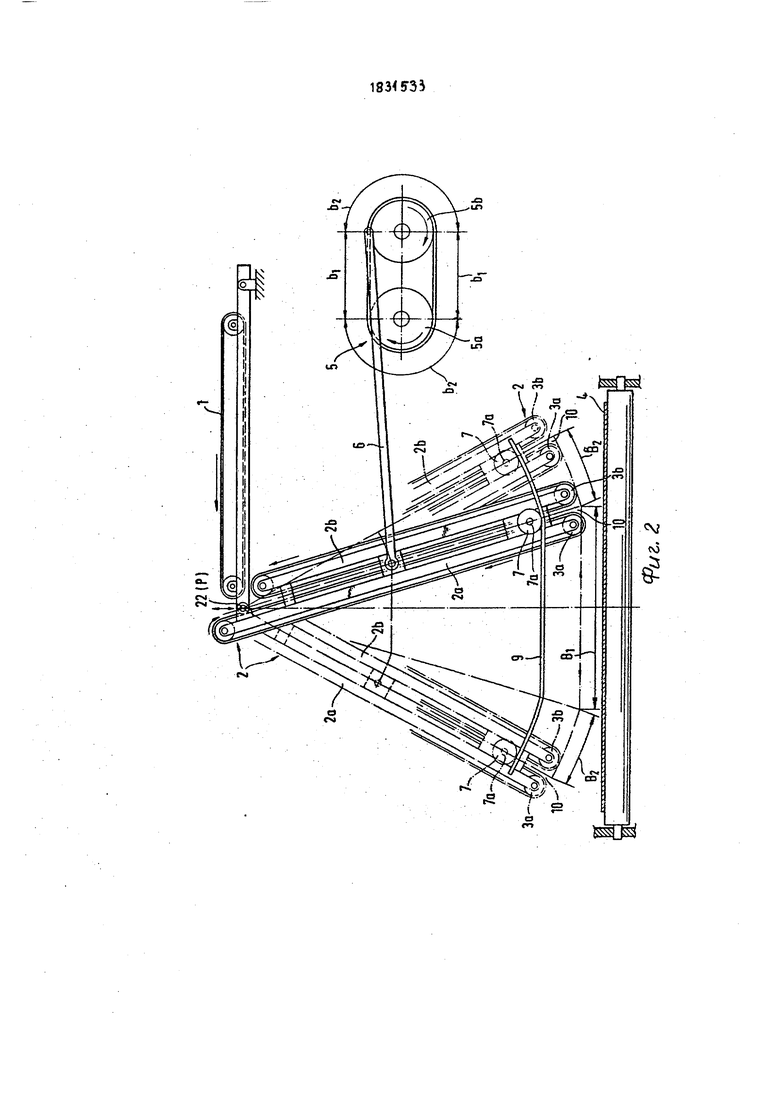
5 затем на замедляющейся и ускоряющейся скорости, тогда как выходной конец в течение фазы постоянной скорости движется на постоянной высоте над принимающим конвейером и в течение фазы замедления соот0 ветственно ускорения движется вдоль дугообразной траектории (случай В) г на фиг.2 - вариант маятника, включающий в себя взаимодействующее приводное устройство, и маятник показан в трех разных
5 положениях; на фиг.З - другой вариант маятника, включающий в себя взаимодействующее приводное устройство и показывающий маятник в трех разных положениях.
0 На фиг.1 на правой стороне фигуры показан случай А, в котором маятник и в течение периода постоянной скорости и в течение периода замедляющейся и ускоряющейся скорости колеблется около точки Р,
5 которая в этом случае является стационарной, и выходной конец описывает круговую дугу. Маятник приводится в движение направляющим устройством D посредством цепи, имеющей постоянную скорость.
0 Соединительная тяга У смонтирована на подшипниках на подвижной части, соединяющей с приводной цепью в точке Тис устройством маятника в точке Кд. В приоод- ной цепи точки с 1 по 12 помечены, в резуль5 тате чего точки с 1 по 7 указывают центральное положение маятника, точки 4 и 10-крайние положения маятника, а точки 12 и 2 соответственно 6 и 8 - пределы зоны, имеющей постоянную скорость.
0 Когда точка Т соединительной тяги на- ходится в положении I. маятник свешивается из точки колебания Р, и положение выходного конца указано цифровой позицией 1 (А), От Т до 2 соединительная тяга
5 движется с постоянной скоростью, и выходной конец описывает круговую дугу, так как точка колебания Р является стационарной. От 2 до А- маятник движется с замедлением, изменяет направление движения в точке 4 и от 4 до 6 движется с ускорением, и от 6 до 7
движется с постоянной скоростью, тогда как выходной конец описывает круговую дугу повышения (соответственно понижения).
В зависимости от положения точки крепления Кд на маятнике относительно приводного устройства, достигается более или менее геометрическая асимметрия, т.е. точки 3 и 5 соответственно 2 и 6 несколько отклоняются друг от друга, что видно на чертеже. Маятник поднимается в крайнем положении 4 на 24 см и образует управляемый виток первичного полотна в точке поворота, В силу меньшего расстояния выходного конца до принимающего конвейера SA, и синхронизации между выходной скоростью и скоростью колебания выходного конца, подаваемое первичное полотно быстро крепится к основе. Движение маятника от точки 7 до 1 является обратным изображением движения между точками 1 и 7, однако не показано.
На левой стороне фиг. 1 показан случай (В), в котором выходной конец маятника в течение периода постоянной скорости движется на постоянной высоте над принимающим конвейером SB, и в течение периода замедляющегося и ускоряющегося движения движется по круговой траектории. В центральном положении маятника, в точке 7, точка колебания маятника находится в Р но снижается до точки Р в течение приводного движения до точки 8, в результате чего выходной конец движется по горизонтальной линии. В течение фазы замедления от точки 8 до точки 10 и фазы ускорения от точки Юдоточки 12точка колебания Рудер- живается постоянной, и выходной конец описывает круговую дугу. Как видно на фигуре, принимающий конвейер SB расположен выше, чем в случае А, потому что точка колебания маятника расположена выше в центральном положении в случае В.
Маятник поднимается в свое крайнее положение, примерно, 16 см, что видно на фигуре чертежа. Образование витков также хорошо управляется в этом случае благодаря короткому расстоянию первичного полотна до основы, в частности, в виде расстояний 7-8 и 12-1, и благодаря синхронизации скорости выходного конца на этих расстояниях,
Чтобы принудить выходной конец маятника двигаться горизонтально в течение основной части, в показанных случаях 50% размаха качания маятника, в результате чего точка колебания должна переместиться из Р1 в Р, требуются специальные измерения. Два варианта таких реализаций показаны на фиг.2 и 3.
На фиг.2 и 3 показана часть маятника машины по производству полотна из минеральной ваты и взаимодействующее приводное устройство. Принимающий конвейер
первичного полотна помечен под позицией 1, взаимодействующий маятниковый конвейер под позицией 2, два противоположных кон- вейера под позицией 2а и 2в и направляющие валики на выходном конце под
0 позицией За и Зв. Принимающий конвейер помечен под позицией 4, приводное устройство под позицией 5, два колеса приводного устройства под позициями 5а и 5в, и соединительная тяга под позицией 6. Части с 1 по
5 6 соответствуют взаимно на фиг.2 и 3 и поэтому помечены одинаковыми цифровыми позициями.
На фиг.2 колесо, которое передает движение маятника в направляющем устройст0 ве, помечено под позицией 7, и ось колеса, закрепленная на маптниковом конвейере, под позицией 7а. Направляющая, вдоль ко- тарой колесо 7 предназначено двигаться, и которая определяет траекторию выходного
5 конца, помечена под позицией 9. Выходной конец маятникового конвейера помечен под позицией 10.
Во время производства полотна (листа) из минеральной ваты, первичное полотно
0 подается на его принимающий конвейер 1 и проходит дальше между конвейерами 2а и 2в в устройство маятника 2, и подается на выходной конец 10. Маятник колеблется вперед и назад, когда подается первичное
5 полотно между направляющими валиками За и Зв. Так как соединительная тяга движется между приводными колесами 5а и 5в, расстояние bi характеризует то, что колесо 7 приобретает постоянную скорость движе0 ния и одновременно движется по части плоскости направляющей 9, в результате чего направляющие валики За и Зв перемещаются по расстоянию Вт с постоянной высотой над принимающим конвейером. Так как со5 единительнэя тяга движется вдоль периферии приводных колес, равное расстояниям Ь2, колесо 7 движется по изогнутому вверх концу, направляющей 9, в результате чего выходной конец маятника описывает соот0 ветствующую дугообразную траекторию на расстоянии В2. Положение направляющей 9 определяется требуемой кинетической геометрией, Точка колебания 22 маятника может перемещаться вдоль линии
5 центрального движения маятника, и принимающий конвейер 1 первичного полотна смонтирован на подшипниках шарнирно, чтобы иметь возможность вертикально следовать за движением входного конца маятника.
На фиг.З показан другой предпочитаемый вариант маятника согласно изобретению. Нижний конец рычага 20 смонтирован на подшипниках снаружи маятника на центральной линии колебательного движения, его верхний конец смонтирован на вильчатых подшипниках и соединен с опорной точкой 8 соединительной тяги 6 на маятнике. Несущая или опорная точка 8 расположена для возможности двигаться в вилке 21 на верхнем конце рычага. Точка колебания 22 маятника может вертикально перемещаться вдоль центральной линии движения, и при- кГимающий конвейер 1 первичного полотна смонтирован на подшипниках шарнирно, чтобы иметь возможность следовать движениям маятника вертикально, как в предшествующем случае. Так как соединительная тяга движется по горизонтальной плоскости между приводными колесами, маятник приводится в угловое положение, когда точка колебания перемещается вниз, пока не достигнет останова 23 в конце периода постоянной скорости. Останов препятствует точке колебания перемещаться далее вниз, и маятник принуждается колебаться около точки колебания Р, теперь неподвижной. В точке этой части замедления движения точка крепления 8 перемещается вверх в вилке 21, и тем самым не препятствует маятнику подниматься по дугообразной линии. В течение последующей фазы ускорения маятник колеблется вниз, и наружный конец 10 описывает ту же дугообразную линию, тогда как точка крепления 8 одновременно перемещается в направлении нижней части вилки 21. То же самое движение повторяется при обратном направлении.
Выгодно устанавливать пружину между центральной осью и рычагом 20, чтобы снимать часть сил замедления и ускорений, образуемых колебанием маятника.
Варианты реализации на фиг.2 и 3 каждый показывают движение маятника, образуемое таким образом, что горизонтальное или по существу горизонтальное выходное движение совпадает с фазой, имеющей постоянную скорость, и движение повышения, соответственно понижения, совпадаете фазой, имеющей замедляющую, соответственно ускоряющую, скорость. Управляемая траектория выходного конца, отклонение от дугообразной траектории могут, конечно, регулироваться, чтобы начинать с любой точки в течение периода постоянной скорости В1 или периода движения замедления или ускорения Ь2.
Как сказано выше, силы замедления и ускорения меньше, чем в ранее используе- мых способах, частично по причине движения подъема на сторонах выхода, и частично по причине меньшего маятника, имеющего меньшую массу. о
Совершенно очевидно, что специалист
5 в данной области способен реализовать изобретательскую идею повышения маятникового движения в крайних положениях, имеющего постоянную скорость движения в центральной фазе колебания маятника, не0 сколькими другими способами дополнительно к вышеописанным вариантам реализации.
Ф о р м у л а и з о б р е т е н и я
1 .-Способ раскладки тонкого, пропитан5 ного связующим, невулканизированного полотна из минеральной ваты, при котором осуществляют подачу первичного полотна, последующее раскладывание в виде складок для получения вторичного полотна на
0 принимающем конвейере посредством расположенного над ним маятникового конвейера, совершающего колебательное движение в плоскости, перпендикулярной к направлению перемещения принимающего
5 конвейера, скорость которого меньше скорости подачи первичного полотна, отличающийся тем, что, с целью повышения качества складываемого зигзагом вторичного полотна заданной толщины и равномер0 ности кромок, при раскладке выходному концу маятникового конвейера сообщают постоянную скорость движения на расстоянии 30-60% рабочего хода последнего, причем в середине рабочего хода постоянная
5 скорость равна скорости первичного полотна, а на оставшейся части рабочего хода маятникового конвейера выходной конец перемещают с ускорением или замедлением, причем во время замедления его подни0 мают над принимающим конвейером, во время ускорения - опускают.
2.Способ поп.1,отличающийся тем, что выходной конец маятникового конвейера перемещают параллельно плоскости
5 принимающего конвейера в течение, по меньшей мере части, а предпочтительно на протяжении всего хода конвейера с постоянной скоростью.
3.Способ по п.1, о т л и ч а ю щ и и с я 0 тем, что выходной конец маятникового конвейера перемещают параллельно плоскости принимающего конвейера в течение всего движения с постоянной скоростью и на протяжении части последующего движения с
5 замедлением, а также в процессе возвратного движения с ускорением и снова в тече- ние всего движения с постоянной скоростью.
4.Устройство для раскладки тонкого, пропитанного связующим, невулкинизипованного полотна из минеральной ваты, содержащее конвейер для подачи первичного полотна, механизм раскладывания полотна в виде маятникового конвейера, выходной конец которого расположен над горизонтальным принимающим конвейером, и привод колебательного перемещения маятникового конвейера в плоскости, перпендикулярной к направлению перемещения принимающего конвейера, от л и ч а- ю щ ее с я тем, что, с целью улучшения качества раскладываемого зигзагом вторичного полотна заданной толщины и равномерности кромок, привод колебательного перемещения маятникового конвейера выполнен в виде бесконечной цепной передачи, приводные колеса которой имеют одинаковый диаметр и расстояние между их осями соответствует 30-60% рабочего хода выходного конца маятникового конвейера, причем часть рабочего хода совершена с постоянной скоростью, при этом маятниковый конвейер имеет средство подъема и опускания его выходного конца до и после крайнего положения в каждом периоде колебания и связан с приводом посредством соединительной тяги.
0
5
0
5
5.Устройство по п.4, отличающее- с я тем, что ось маятникового конвейера установлена с возможностью перемещения в вертикальной плоскости.
6.Устройство по п.4, отличающее- с я тем, что средство подъема и опускания выходного конца маятникового конвейера выполнено в виде рычага с вильчатым подшипником на одном конце и смонтированным другим концом на подшипниковой опоре, установленной по центральной оси маятникового конвейера, а его конец,несущий вильчатый подшипник, соединен с соединительной тягой и установлен на маятниковом конвейере для обеспечения полного его качания.
7.Устройство по п.4, отличающее - с я тем, что средство для подъема и опускания выходного конца маятникового конвейера выполнено в виде криволинейной направляющей и элемента качания или скольжения, смонтированного на маятниковом конвейере для взаимодействия с направляющей.
8.Устройство по пп.4 и 5, отличающее с я тем, что оно снабжено стопором- ограничителем перемещения оси маятникового конвейера в вертикальной плоскости.

| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК ДЛЯ ОБДУВАНИЯ УТЕЛЬНОЙ ПОСУДЫ | 1929 |
|
SU18649A1 |
| Акселерометр космический | 2019 |
|
RU2721589C1 |
| КРУГОВОЙ МАЯТНИКОВЫЙ ПРИВОД | 2022 |
|
RU2801882C1 |
| Способ нанесения слоев материала на поверхность длинномерного движущегося полотна и аппликатор для его осуществления | 1989 |
|
SU1825335A3 |
| ГОРИЗОНТАЛЬНЫЙ МАЯТНИКОВЫЙ ИЗМЕРИТЕЛЬ УГЛА | 2013 |
|
RU2563546C2 |
| Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации | 2020 |
|
RU2745083C1 |
| Маятник Яримова | 2024 |
|
RU2838586C1 |
| ИЗОТРОПНЫЙ ГАРМОНИЧЕСКИЙ ОСЦИЛЛЯТОР С ПО МЕНЬШЕЙ МЕРЕ ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ И СООТВЕТСТВУЮЩИЙ РЕГУЛЯТОР С ОТСУТСТВУЮЩИМ СПУСКОВЫМ МЕХАНИЗМОМ ИЛИ С УПРОЩЕННЫМ СПУСКОВЫМ МЕХАНИЗМОМ | 2015 |
|
RU2686446C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В МЕЖВАЛЬЦОВОМ ЗАЗОРЕ ВАЛЬЦОВОГО ПРЕССА | 2012 |
|
RU2604509C2 |
| УСТРОЙСТВО ДЛЯ ФИКСИРОВАНИЯ И УЧЕТА ПРЕДЕЛЬНЫХ КОЛЕБАНИЙ ПРИ ТРАНСПОРТИРОВКЕ | 2006 |
|
RU2316008C1 |

Сущность изобретения: способ раскладки тонкого пропитанного связующим невулканизированного полотна из минеральной ваты включает в себя подачу первичного волокна, раскладывание в виде складок для получения вторичного полотна на принимающем конвейере посредством маятникового конвейера. Последний расположен над принимающим конвейером и совершает колебательное движение в плоскости, перпендикулярной направлению перемещения принимающего конвейера. При раскладке выходному концу маятникового конвейера сообщают постоянную скорость движения на расстоянии 30-60% рабочего хода последнего. В середине рабочего хода постоянная скорость равна скорости первичного полотна. На оставшейся части рабочего хода маятникового конвейера выходной конец перемещают с ускорением или замедлением. При замедлении выходной конец поднимают над принимающим конвейером, а при ускорении - опускают. Устройство для осуществления способа раскладки полотна содержит конвейер для подачи первичного полотна, механизм раскладывания полотна в виде маятникового конвейера, выходной конец которого расположен над принимающим конвейером. Маятниковый конвейер имеет средство подъема и опускания его выходного конца до и после крайнего положения в каждом периоде колебания и связан с приводом посредством соединительной тяги. 2 с. и 6 з.п, ф-лы, 3 ил. on С
(В) (А,В)
(В)
Риг. /
45
о
In
СО
00
гъпд
(4)11
| ЛЕЗВИЯ БРИТВЕННОГО ПРИБОРА | 2009 |
|
RU2450916C1 |
| Способ приготовления пищевого продукта сливкообразной консистенции | 1917 |
|
SU69A1 |
