Изобретение относится к конвейерной системе верхнего расположения, содержащей сеть конвейерных путей и одну или несколько конвейерных тележек, имеющих колеса перехода, причем сеть конвейерных путей включает зоны смены путей. Что касается свойств изобретения - конвейерной си- стемы верхнего расположения, она особенно хорошо пригодна, например, для транспортирования плитообразных строительных блоков из бетрна между различными пунктами обработки на. заводе-изготовителе.
Преимуществами настоящего изобретения являются следующие:
-в точках скрещения альтернативных путей переключатели путей не нужны;
-когда груз переносится с одного рабочего места на другое, подъемный крюк в
промежутках не должен сцепляться и расцепляться вручную;
-возможно переносить груз в длину в узких пространствах при подвеске за две точки;
-менее тяжелые конструкции опоры путей, поскольку отсутствует выступающий поворотный рельс с тяжелым противовесом, обеспечивающий боковой сдвиг;
-не нужны гри раздельных ходовых рельса.
В конвейерной системе верхнего расположения в соответствии с настоящим изобретением путем сдвига центра тяжести фуза и конвейерной тележки по горизонта- -лй в поперечном направлении и путем смены положения колесных групп перехода, nooV чередно захватывающих смежные ходовые пути, конвейерную тележку, перемещающуюся вдоль стационарного конвейерного пу00
CJ О
ю VI
со
со
7и вместе с грузом, который она несет, можно заставить двигаться по соседнему пути с целью обхода. В других случаях, если необходимо, конвейерная тележка может по выбору также сделать скачок на другой путь, расположенный в стороне, без какого-либо элемента переключения путей, который изменяет ее рабочее положение или перемещает ее иным образом.
На фиг.1 представлен концевой вид конвейерной тележки и перемещаемого элемента подвески, расположенного на рабочем месте, причем конвейерная тележка показана в разрезе по линии Б-Б фиг.2; на фиг.2 - продольный разрез по линии Л-А фиг.1, причем дополнительно показана со снятым кожухом шестеренчатая трансмиссия лебедочной части, расположенной дальше сзади; на фиг.З - разрез эл.емента подвески перемещаемого типа по линии В- В фиг.1; на фиг.4- концевой вид лебедочной части конвейерной тележки, рассматриваемой как зеркальное отображение разреза по линии Г-Г фиг.2; на фиг.5 - концевой вид в разрезе конвейерной тележки и элементов захвата элемента подвески по линии А-А фиг.бгна фиг.6 - вид сверху в разрезе элемента захвата конвейерной тележки по линии Б-Б фиг.5; на фиг.7 - вид сверху элемента захвата элемента подвески; на фиг.8 - положения колесных групп конвейерной тележки, видимых по направлению Д, изображенному на фиг.1; на фмг.9 и 10 варианты решений колесных групп конвейерной тележки; на фиг.11 - дое связанные конвейерные тележки с грузом, подвешенным за две точки; на фиг. 12 - зона смены путей; на фиг. 13 - все расположения путей; па фиг.14 - направляющие токоподающего рельса в точке скрещивания зоны смены путей; на фиг.15 - концевой вид примера реализации конвейерной тележки в зоне скрещивания области смены путей; на фиг. 16 -- продольный разрез конвейерной тележки, у которой изменение положения колесных групп перехода и поворота, который составляет поперечный сдвиг блока лебедки, выполняются посредством раздельных двигателей; на фиг.17 - разрез Е-Е на фиг. 16; на фиг.18-положения колесных групп конвейерной тележки по фиг.8, когда изменение положения колесной группы выполняется посредством поворотного перемещения на 120°; на фиг. 19 - такую колесную группу перехода по фиг. 1.15 и 18, положения расцепления/зацепления которых инверсны положениям расцепления - зацепления колесных групп перехода, показанным на фиг.1, 8, 9, 10, 15, 17 и 18; на фиг.20- разрез Ж-Ж на фиг. 19; на фиг.21 -
разрез, соответствующий фиг.16 такого примера реализации конвейерной тележки, у которой положения колесных групп перехода, помещенных бок о бок на различных
сторонах, изменяется посредством гидравлических цилиндров с каждой стороны, независимых друг от друга.
Система в соответствии с настоящим изобретением состоит из одной или нескольких конвейерных тележек 1, элементов подвески 2, крюков 3, а также путей 4, 4А, 4В. Конвейерная тележка 1 состоит из устройства перехода 5 и блока лебедки 6, которая снабжена элементом захвата 7
5 конвейерной тележки. Элемент подвески 2 соответствующим образом снабжен элементом захвата 8. Элемент подвески 2 может быть либо снабжен колесами, перемещаемыми посредством конвейерной
0 тележки 1 по рельсу 4А, либо быть неподвижным.
Устройство перехода 5 конвейерной тележки 1 содержит колесные группы 9, 9 и 10,10, установленные одна задругой с каж5 дрй из ее сторон. Какая-либо одна из этих колесных групп, расположенная на любой стороне, находится в несущем положении. Колесные группы 9,9 идут по рельсу 4, либо, как вариант, колесные группы 10,10 идут по
0 рельсу 4А или 4В. Колеса в группах 9 и 9 и 10, 10 могут подниматься и опускаться, та- . кимобразом колесные группы, расположенные с любой одной из сторон, могут быть поставлены в несущее положение.
5 .: Блок лебедки б, который помещен ниже устройства перехода 5, может поворачиваться, вокруг вертикального вала 24. Посредством поворотного перемещения, во-первых, можно сдвигать центр тяжести
0 устройства, состоящего из конвейерной тележки и груза, чтобы их опора могла быть сделана стабильной независимо от того, с какой стороны оказываются несущие колесные группы 9, 9 или 10, 10.
5
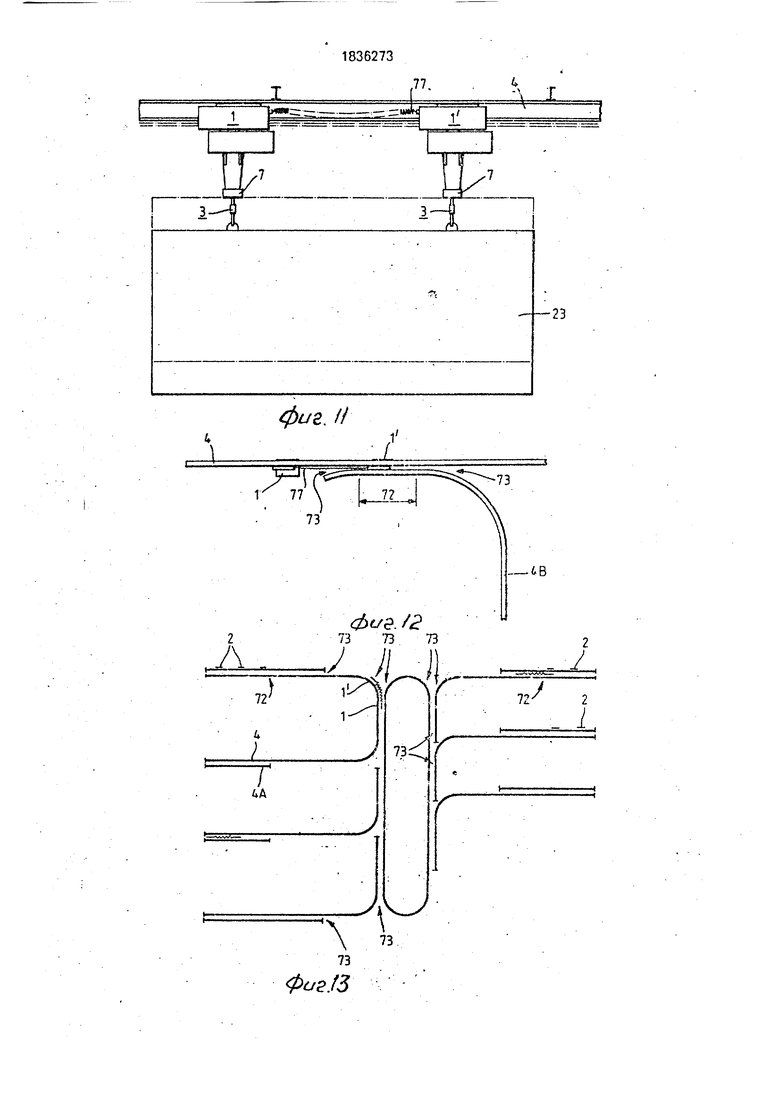
При повороте блока лебедки 6 элемент захвата 7 конвейерной тележки вместе с его грузом 23 может также сдвигаться в сторону на достаточную величину, так чтобы, если
0 необходимо, другие грузы 23, свисающие с элементов подвески 2, переносимые на наружной стороне того же самого пути 4А, могли быть обойдены.
Кроме того, посредством поворотного
5 перемещения блока лебедки 6, если необходимо, элемент захвата 7 конвейерной тележки 1 может сдвигаться и устанавливаться над элементом захвата 8 элемента подвески. Тем самым крюк 3 с грузом 23 может быть опущен из элемента
захвата 7 конвейерной тележки на элемент захвата 8 элемента подвески, и наоборот.
На рис.1 видна зона встречи путей 4 и 4А, где рельсы двутаврового сечения 17 и 18 идут рядом и параллельно друг другу. Стороны рельсов 17 и 18, обращенные друг к другу, снабжены направляющими 19, 21 и 20, 22. Нижние направляющие 19 и 20 прикреплены к верхним поверхностям нижних фланцев рельсов двутаврового сечения, обращенным друг к другу, а верхние направляющие прикреплены к нижним сторонам верхних фланцев рельсов двутаврового сечения, обращенным друг к другу. Таким образом, сформированы два С-образных паза, открытых навстречу друг другу.
Посредством своих индивидуальных колес 11, 12 и 13, 14. а также посредством вспомогательных колес 15, 16, колесные группы перехода 9, 9 и 10, 10 точно захватывают нижнюю направляющую 19 и верхнюю направляющую 21, прикрепленные к рельсу двутаврового сечения 17, либо, как вариант, они захватывают соответствующие направляющие 20, 22 рельса двутаврового сечения 18 на другой стороне, в зависимости от того, в сторону какого рельса двутаврового сечения был. повернут посредством вала 24 элем.ент захвата 7 конвейерной тележки вместе со своим крюком 3 и грузом 23.
Вертикальный вал 24 и колесные группы перехода 9, 9 и 10,10 механически связаны промежуточным продольным приводным валом 25. Приводной вал 25 приводится в движение переключающим электродвигателем 26 через цепную передачу 27 и зубчатую передачу 28. Колесные труппы перехода 9, 10 поворачиваются на подшипниках 29, 30, которые расположены эксцентрично относительно валов, несущих колес 11, 13, Несущие колеса 11, 13 также эксцентричны относительно друг друга. Колесо 12 прикреплено к колесной группе 9, так что его вал, обращенный к колесу 11, параллелен радиусу колеса 11. В своем верхнем положении -с вертикально расположенным валом колесо 12 бежит по вертикальной поверхности верхней направляющей 21. Соответственно, вал колеса 14 в колесной группе 10, Обращенной к колесу 13, параллелен радиусу колеса 13. Валы колес 12 и 14 находятся под углом 90° друг к другу. Несущее колесо 13, входящее в колесную группу перехода 10 на той стороне, которая в момент рассмотрения находится в расцепленном состоянии, поднято со своей направляющей 20, а вал колеса 14 находится в горизонтальном положении. Вертикальный разрез колесной группы, находящейся в расцепленном состоянии, меньше, чем зазор между направляющими
20. 22, расположенными одна над другой. В этом случае указанная колесная группа пе- 5 рехода 10 легко выходит в сторону из пространства, образованного рельсом двутаврового сечения 18 и направляющими 20, 22, в пункте пути 4, где рельсы 17, 18 становятся более удаленными друг от друга
10 в направлении движения.
Посредством червячных передач 31, 32, 33 один и тот же ведущий вал 25 приводит в действие и колесные группы перехода 9, 10, 9, 10, и вал 24, который поворачивает
5 блок лебедки 6. Колесные группы перехода 9, 10 и 9, 10 с каждой стороны взаимосвязаны попарно посредством валов 34,37.
Движение поворотного вала 24 блока лебедки 6 осуществляется приводным ва0 лом 25 через вспомогательный вал 90, уста- новлснный на раме и помещенный в стороне от центральной линии ведущего вала 25.
Устройство перехода получает возмож5 ность для своей работы от переключающего электродвигателя 35, который через промежуточную шестеренчатую передачу 36 вращает вал 37, концы которого снабжены соответствующими шестернями 40, 41, ко0 торые входят в зацепление с шестернями 38, 39, когда указанная колесная группа 9, 9 или-10, 10 находится в положении захвата, и соответствующие несущие колеса 11 или 13 находятся в своем нижнем поло5 жении, Вал 37 соединяется цепной передачей 42 с соответствующим валом 37, который приводит в действие несущие колеса 11, 13 с другой стороны.
Смена пути выполняется изменением
0 положений колесных групп 9, 9 и 10, 10 путем поворота валов 34,34 и на 90°, причем указанный поворот производится посредством самоудерживающих винтовых передач 31, 32. Этот поворот показан на рис.8 для
5 всех колесных групп 9, 9 и 10, 10. Сплошные линии обозначают колесные группы 9.9 в несущем положении, а колесные группы 10, 10 в расцепленном положении. Штрихпунктирные линии обозначают поло0 жения поворота на 90°, за счет чего функции колес изменяются на обратные. Когда меняется путь, перед тем, как колесные группы перехода на другой стороне заблокируются в своих несущих положениях, конвейерная
5 тележка 1 должна быть опущена на несколько миллиметров. Это определяет вращающий момент переключающего электродвигателя 26, который приводит в действие ведущий вал 25, а также боковой зазор гибких токосъемников 70. 71.
Блок лебедки 6 содержит тросовую лебедку 43 с направляющими штырями 44, а также блок электрического управления 45. Блок лебедки 6 содержит далее штыри 46, 47, перемещаемые аксиально с помощью соленоида для зацепления и расцепления с фрикционным тормозным захватом 48, предусмотренным в элементе подвески 2, снабженном колесами.
Тросовая лебедка 43 отличается от обычной тросовой лебедки тем, что она снабжена двумя тросовыми барабанами 51, 52, вращающимися в противоположных направлениях, так чтобы можно было пристроить подъемные тросы 53, 54 соответствующие образом относительно предохранительного захвата 7 конвейерной тележки. Поскольку требуемое расстояние подъема небольшое, длина тросов 53, 54 и тросовых барабанов также мала, а скорость подъема сравнительно низкая, то двигатель лебедки 55 сравнительно мал.
Предохранительный захват 7 конвейерной тележки 1 и предохранительный захват 8 элемента подвески 2 снабжены предохранительными ловителями 56, 57 (фиг.5-7), за- пирземыми усилием пружины и открываемыми, когда напротив их располагается предохранительный захват. Предохранительный захват 7 конвейерной тележки отпирает предохранительный ловитель 57 элемента подвески и наоборот. Предохранительный ловитель 57 отпирается клиньями 58, предусмотренными у него, толкаемыми вместе захватом 7, а предохранительный ловитель 56 отпирается .клиньями 59. . - .
На штоке крюка 3 имеются два выступающих участка захвата 60 и 61, расположенные-один над другим. Элемент захвата 8 элемента подвески снабжен гнездом 80, которому подходит нижний участок захвата 60. Соответственно, элемент 7 на конвейерной тележке снабжен гнездом 81, которому подходит верхний участок захвата 61. Когда предохранительные ловители 56, 57 отпираются, предохранительный захват 7 конвейерной тележки может понять нижний участок захвата 60 крюка 3 над предохранительным ловителем 57. В этом случае крюк 3 может быть вынут из элемента подвески 13 сдвигом конвейерной тележки 1 на ее рельсах с сдвига крюка в сторону из паза 62. Соответствующим образом, опусканием предохранительного захвата 7 можно установить над. предохранительным ловителем 56 верхний участок захвата 61, за счет чего перемещение тележек конвейера 1 в любом направлении оставляет крюк 3 на элементе подвески 2. Предохранительный захвата 7
конвейерной тележки снабжен пазами 63, 64, открывающимися вперед и назад.
Длл того, чтобы груз 23 не крутился, когда блок лебедки 6 поворачивается из од- ного положения в другое, т.е. на 180° вокруг вертикальной оси, крюк имеет подшипниковый узел свободного вращения 65.
Для того, чтобы элемент подвески не
мог перемещаться, когда крюк устанавливается на свое место или снимается оттуда, в перемещаемом элементе подвески необходим фрикционный захват 48. Тормозной захват 48 открывается и закрывается с
помощью прижимных торцев 66, 67 (фиг.З), которые приводятся о действием штырями 46, 47 (фиг.1), управляемых так же, как и прочими функциями конвейерной тележки с земли, например, посредством инфрэкрас ного устройства дистанционного управления.
Чрезмерный поворот колесных групп перехода 9, 10 предотвращается посредством механического стопора, который на
прилагаемых рисунках не показан, также как не показаны микропереключатели, которые детектируют положения колесных групп перехода. Конвейерная тележка 1 получает питание для работы от токопрово дящих рельсов 68. Токосъемники 70, 71 расположены с обеих сторон конвейерной тележки 1. Один проводник в токосъемниках 70 и 71 предусмотрен исключительно для обеспечения информации о том, что положения колесных групп могут быть изменены только тогда, когда на другой стороне имеется действующий токоведущий рельс.
В зоне встречи 73 области смены путей 72 трковедущие рельсы 68В должны быть
снабжены направляющими 74, как показано на фиг.14, чтобы обеспечить падение токосъемников 70, 71 на токоведущие рельсы.
В зонах встречи 73 области смены путей 72 пути 4, 4В снабжены дополнительными
ребрами жесткости 89 (фиг. 15), чтобы повысить точность установки колесных групп перехода 9, 10 за счет снижения бокового рыскания конвейерной тележки 1.
Если необходимо, кон-вёйерная тележка
может быть снабжена вспомогательными колесами 75, а зоны встречи могут быть снабжены соответствующими вспомогательными рельсами 7G (фиг. 15). Они повышают стабильность конвейерной тележки в отношении бокового рыскания, если вертикальная линия Ркок, проходящая через центр тяжести устройства, составленного грузом и конвейерной тележкой, находится внутри суппортной области, образованной
несущими колёсами 11 или 13 и нижней направляющей 19 или 20. Это достигается либо посредством конструктивных размеров конвейерной тележки 1, либо путем передвижения блока лебедки. 6 на конвейерной тележке 1 в зоне встречи 73 в частично повернутом положении (фиг.15).-В таком случае возможность индивидуального поворота блока лебедки 6 (фиг. 16 и 17) обязательна.
Блокируемая колесная группа 9, 10 может быть создана рядом различных способов. Фиг.9 и 10 изображают пару примеров. На фиг.9 колеса находятся в одной и той же вертикальной плоскости. На рис.10 они находятся в различных плоскостях. Колесные группы перехода с их направляющими могут также быть подобными колесным группам/рельсам в системе по патенту ЕР 0,110.196 (патент США 4 561 359).
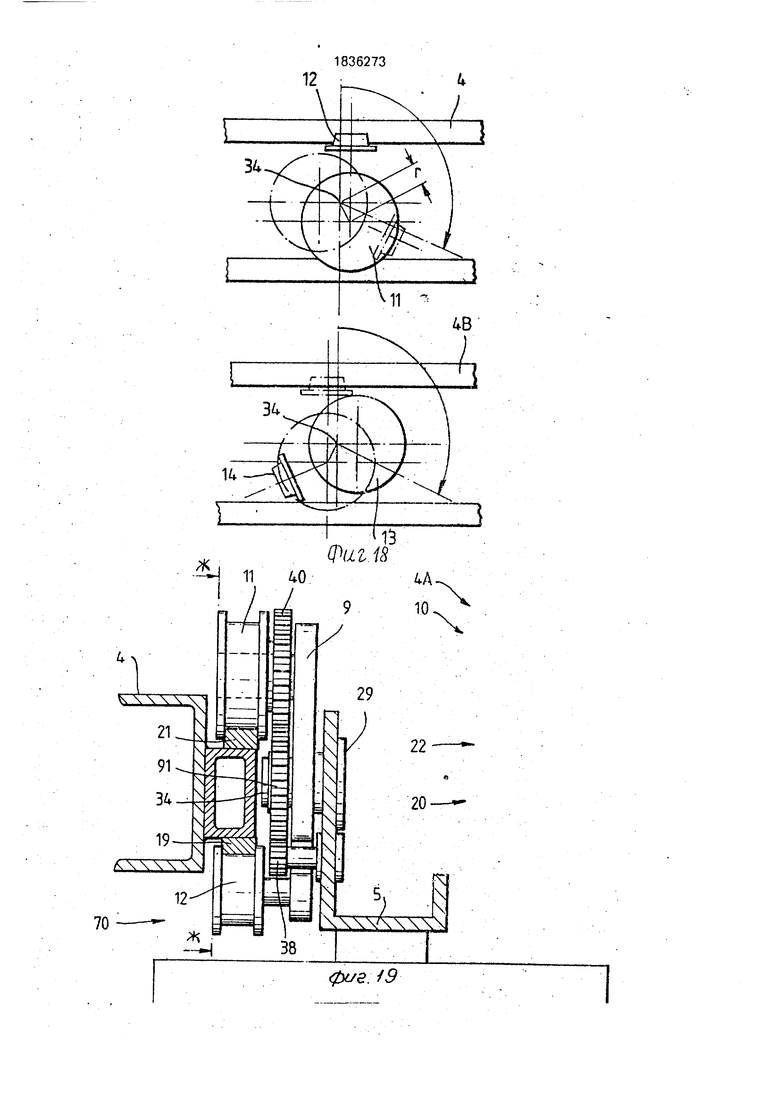
Общим признаком колесных групп перехода, показанных на рис.1, 8, 9. 10,15, 17 и 18, является то, что направляющие 19 и 21, а также 20 и 22 находятся снаружи индивидуальных колес 11 и 12, а также 13 и 14. В решении, показанном на рис.19 и 20, та же функция достигается посредством перевернутого устройства. Там направляющие 19 и 20 находятся внутри индивидуальных колес перехода 11 и 12. Оба колеса -11, 12 в колесной группе 9 установлены на параллельных горизонтальных валах. В положении захвата верхнее колесо 11 находится в своем нижнем положении в контакте с верхней стороной верхней направляющей 21. а нижнее колесо 12 находится в своем верхнем положении в контакте с нижней стороной нижней направляющей 19. Когда колесная группа поворачивается, колеса 11 и 12 расцепляются со своими направляющими, за счет чего колесная группа может сместиться вбок относительно пути. Устройство по рис.19 и 20 приемлемо, в частности, для грузов сравнительно малого веса..
При работе груз 23 поднимается, например, снизу на элемент подвески 2 посредством блока лебедки 6 и крюка 3 конвейерной тележки 1 и крюк 3 вместе с грузом 23 остаются, поддерживаемые на предохранительном захвате 8 элемента подвески 2 до тех пор, пока груз 23 не будет перемещён с элемента подвески 2 на более позднем этапе на другой элемент подвески, и, наконец, пока один груз посредством других способов не будет снят, а элемент подвески 2 вернется во время обратного перемещения конвейерной тележки 1 назад к начальной точке процесса..
Выгодно сооружать столько стлционар- ных элементов подвески 2 без колес, сколько возможно. В этом случае фрикционный тормозной захват 48 совсем не нужен. В принципе, перемещаемый элемент подвески 2 нужен только в случае применения 5 подвески за две точки в соответствии с рис.11, где один элемент подвески может быть стационарным, а другой элемент под- вески2 перемещаемого типа всегда перемещается посредством его толкания
tO конвейерной тележкой 1, так что он приспосабливается для требуемого расстояния подвески. В качестве толкающего буфера между конвейерной тележкой и перемещаемым элементом подвески 2 можно исполь5 зовзть крюк 3, сам предохранительный захват 7 конвейерной тележки, либо режущие штыри 47, которые, будучи вставлены о выемку в прижимном торце 67, предусмотренном в элементе подвески 2,
0 выполняют отпирание тормозного захвата 48. Если груз-23 подвешен только на перемещаемых элементах подвески 2, их можно перемещать с грузом 23 посредством конвейерной тележки на участки, где имеются
5 пути 4 и 4 А, и где для перехода с одного пути 4 на соседний путь 4А переключатель пути не требуется. По причинам безопасности изменения положений колесных групп перехода 9, 9 ; 10, 10 о зоне смены путей 72
0 происходит только тогда, когда конвейерная тележка неподвижна. Только тогда, когда в результате изменения положения сработает микропереключатель (не показанный на прилагаемом рисунке), можно
5 двигаться дальше.
В примере реализации, изображенном на рис.16 и 17, поворот блока лебедки вокруг вертикального вала 24 на 180° выполняется ее собственным переключающим
0 электродвигателем 83, червяк 84 которого находится в зацеплении со стационарным червячным колесом 85, предусмотренным в устройстве перехода 5. Для целей перехода предусмотрены цепная передача 86 и шес5 терни 87, 88.
В примерах реализации в соответствии с рис.1, 2, 8, 15. 16 и 17, где изменения колесных групп перехода 9,9 ; 10,10 выполняются поборотом валов 34, 34, которые
0 эксцентричны Относительно колес 11, 1 Г;
13, 13, и которые несут колесные группы.
описанного типа, на 90° в одну и другую
сторону, конвейерная тележка 1 в связи со
сменой путей подскакивает на величину
5 1-V2/2, т.е. примерно на 29% эксцентриситета г. Механизм поворота колесных групп перехода 9, 9 ; 10, 10 может быть также сконструирован так, что колесные группы 9, 9 на одной стороне не отопрутся до тех пор, пока не будут заблокированы колесные
группы перехода 10,10, на другой стороне. С кристической точки зрения простое решение для применения колесных групп перехода в соответствии с рис.1, 2, 8, 15, 16 и 17 достигается поворотом вала 34 на 120е (рис.18). В этом случае попрыгивание составляет только 1.3% эксцентриситета г.
Указанное подпрыгивание устраняется полностью, например, посредством решения е соответствии с рис.21. На нем попе- речные валы поворота 95, 95, 96, 96 не продлены так, чтобы передавать вращающий момент с одной стороны на другую, а обрезаны так, что положения колесных групп перехода с каждой стороны могут из- меняться независимо друг от друга посредством своих собственных гидравлических цилиндров 92 (на рис,21 виден только один .цилиндр 92 на первой стороне, а соответствующий цилиндр на другой стороне распо- ложен симметрично вдоль первого цилиндра). Валы 95, 95 поворота колесных ,-рупп перехода на одной стороне могут быть соединены посредством шатуна 93. В этом случае на одну сторону нужен только одмн цилиндр поворота 92. Часть 94 представляет блок гидравлического насоса. Та- ким образом, когда в связи со сменой путей используется решение по рис.21, колесные группы перехода, расположенные со сторо- ны нторого пути 4А, 4В, могут быть заперты до того, как отопрутся колесные группы перехода, расположенные со стороны первого пути 4. С целью повышения жесткости на изгиб концы валов 96,96 на второй стороне частично вставлены в валы 95, 95 на первой стороне. Цепная передача 86 (рис.21), которая осуществляет перемещение конвейерной тележки 1 в направлении пути посредством несущих колес, расположена с края у первой стороны. .
Участки захвата 60, 61 крюка, расположенные один над другим, имеют форму сфе- рических чаш, которая допускает небольшой попорот в сторону без изгибаю- щего усилия на захватывающем соединении, образованном корпусом чаши 80, 61 и участком захвата 60, 61.
Сеть путей, свободная от переключате- пей для системы верхнего расположения, в соответствии с настоящим изобретением, которая функционально эквивалентна нескольким электромеханическим переключателям, специфична для каждого применения и может осуществляться рядом способов, более подробное рассмотрение которых должно происходить отдельно. Прилагаемый рис.13 показывает один пример реализации.
Формула изобретения
1.Конвейерная система верхнего расположения, включающая сеть ходовых конвейерных путей с зонам смены путей и одну или несколько конвейерных тележек с блоками лебедок, подвесок и с колесами перехода, о т л.и чающаяся тем, что, с целью расширения технологических возможностей, в зонах смены путей первый и второй ходовые пути расположены параллельно один другому на расстоянии, их ходовые поверхности выполнены в виде направляющих, при этом конвейерные тележки выполнены в виде двух колесных групп перехода с несущими колесами, расположенными эксцентрично одно относительно другого, и направляющими колесами, установленными с возможностью размещения в положение захвата напротив ходовых поверхностей направляющих одного из путей, причем колесные группы перехода установлены с возможностью изменения расстояния между положением захвата и расцепленным положением.
2.Система по п. 1, о т л и ч а ю щ а я с л тем, что колесные группы перехода, расположенные рядом на одной конвейерной тележке, закреплены эксцентрично одна относительно другой посредством общего поперечного поворотного вала,
3.Система по п. 1 .отличающаяся тем, что колесные группы перехода, расположенные рядом на одной конвейерной тележке, закреплены эксцентрично посредством поперечных поворотных валов, установленных на противоположных сторонах тележки с возможностью независимого изменения положения на каждой из сторон.
4.Система по п. 1, о т л и ч а ю щ а я с я тем,.что.блок лебедки с нагрузочной частью конвейерной тележки установлен с возможностью поворота вокруг вертикального вала, причем нагрузочная часть закреплена на вертикальном валу эксцентрично. .
5.Система по п.4, отличающаяся тем, что нагрузочная часть установлена на вертикальном валуе возможностью поворота и эксцентрично относительно последнего.
6.Система по п.4 или 5, о т л и ч а ю- щ у я с я тем, что нагрузочная часть установлена на конвейерной тележке с возможностью перемещения в поперечном направлении для образования зазора между грузом, подвешенным к нагрузочной части, и грузом, подвешенным на подвеске на том же пути.
7.Система по пп.4-6, отличающаяся тем, что нагрузочная часть установлена на
конвейерной тележке с возможностью перемещения в поперечном направлении до совмещения с продольной линией перемещения груза подпески, расположенной вдоль пути.
8. Система по п. 1,отличающаяся тем. что она имеет один или несколько стационарных или перемещаемых механизмов подпески с крюками, расположенных вдоль пути, при этом крюки установлены на нагрузочной части конвейерной тележки или на
грузачной части подвески с возможностью расцепления и выполнены с двумя участками захвата, расположенными одни над другим.
9. Система по п.8, отличающаяся тем, что нагрузочная часть конвейерной тележки и нагрузочная часть механизма подвески имеют предохранительные захваты, установленные с возможностью отпирания при начале движения навстречу друг другу.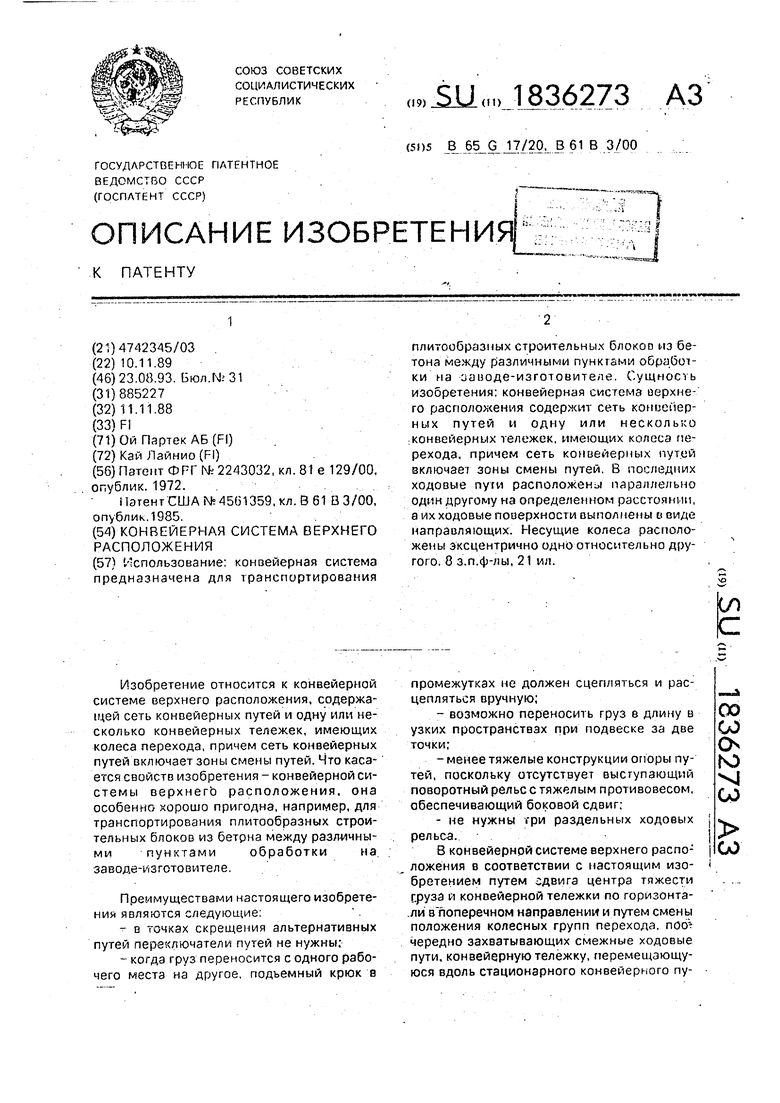



| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНАЯ ПЛАТФОРМА | 2014 |
|
RU2582527C1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| Консольный кран | 1982 |
|
SU1068376A1 |
| ЖЕЛЕЗНОДОРОЖНАЯ ПЛАТФОРМА | 1996 |
|
RU2108933C1 |
| НОСИТЕЛЬ ДЛЯ ИЗДЕЛИЙ И ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО | 2004 |
|
RU2350540C2 |
| Устройство для установки в боксы автомобилей в многоэтажных автоматизированных гаражах | 1990 |
|
SU1825866A1 |
| КОМПЛЕКС ТРАНСПОРТИРОВКИ И АДРЕСНОЙ ДОСТАВКИ БЕТОНА | 2014 |
|
RU2587767C1 |
| Крепеукладчик | 1988 |
|
SU1645537A1 |
| Консольный складывающийся кран | 1978 |
|
SU753780A1 |
| Захватная балка для подъема и опускания шандоров в гидротехнических сооружениях | 1936 |
|
SU57028A1 |









Использование: конзейерная система предназначена для транспортирования 2 плитообразных строительных блоков из бетона между различными пунктами обработки на оаиоде-изготовителе. Сущность изобретения: конвейерная система оерхне- го расположения содержит сеть кониеиер- ных путей и одну или несколько ;конвейерных тележек, имеющих колеса перехода, причем сеть конвейерных путей включает зоны смены путей. В последних ходовые пути расположены параллельно один другому на определенном расстоянии, а их ходовые поверхности выполнены о виде направляющих. Несущие колеса расположены эксцентрично одно относительно другого. 8 з.п.ф-лы, 21 ил.
29 34 .10 1ьА- . . 1 v ,ц
M25v3M 22А ,/
.46
А
СП
L
J
ШЭШ
Ф й г.з
оэ„
«I 5
fU
IS
cx
CA
О No -J 00
I
СП
О /
О
ON
Jrf
59 фа$. 7
физ.10
badД
фиг. //
Т 77 73
Л Л
73 73 73
л
73
фиг.3
-73
«
п
CD П CO
фиг.
/7
12
i15
Фиг. 18
Редактор С. Кулакова
Т
№
фиэ.г
Составитель Г. Малышко
Техред М.МоргенталКорректор И.Шмакова
94
| НОСИТЕЛЬ КАТАЛИЗАТОРА И СПОСОБ ЕГО ПОЛУЧЕНИЯ | 2003 |
|
RU2243032C1 |
| Горный компас | 0 |
|
SU81A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| . | |||
| Патент США № 4561359, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
