Область изобретения
Настоящее изобретение относится к носителю для изделий, выполненному с возможностью перемещения по направляющей транспортера и выполненному как троллей, имеющий, по меньшей мере, два колесных блока, выполненных с возможностью перемещения по направляющей транспортера, и рычаг носителя, подвешенный на каждом колесном блоке и снабженный несущими элементами для изделий, предназначенных для транспортировки.
Настоящее изобретение также относится к конвейерной системе, содержащей первый конвейер и, по меньшей мере, второй конвейер вместе с множеством носителей для изделий, выполненных с возможностью перемещения вдоль конвейеров для перемещения изделий, при этом первый конвейер содержит непрерывную направляющую, и троллеи имеют колесные блоки, предназначенные для перемещения по направляющей, а второй конвейер содержит цепной транспортер в форме петли из звеньев, содержащих элементы для приема и удержания троллеев во время транспортировки, при этом такие удерживающие элементы расположены с выбранными интервалами друг от друга.
Предпосылки к созданию изобретения
Так называемые подвесные конвейеры для транспортировки отдельных объектов известны, см., например, US 4817778 А. Такой конвейер содержит несколько направляющих, вдоль которых движутся носители изделий. Каждый носитель изделий содержит троллей и подвесные несущие элементы для транспортируемого объекта. Для транспортировки крупных изделий или нескольких объектов на одном носителе необходимо придавать направляющим и троллеям увеличенные размеры или оснащать троллеи несколькими колесными блоками. Использование более чем двух колесных блоков на троллее позволяет, например, использовать одну и ту же направляющую конвейера для транспортировки и легких объектов, переносимых носителями с одним колесным блоком, и более тяжелых объектов, используя носители с несколькими колесными блоками. Однако при использовании носителей с множеством колесных блоков могут возникнуть проблемы на наклонных участках направляющей, поскольку нагрузка между колесными блоками может распределяться неравномерно. Троллеи имеют сочлененную конструкцию, и интервал между колесными блоками может меняться, что приводит к возникновению проблем, особенно на переходе между направляющими, например, цепного транспортера.
Краткое описание изобретения
Целью настоящего изобретения является устранение вышеуказанных недостатков при транспортировке более чем одного объекта или тяжелых объектов на одном и том же носителе для изделий.
Эта цель достигается посредством носителя для изделий, отличающегося тем, что рычаги носителя соединены друг с другом через позиционирующий механизм, который выдерживает существенное расстояние между колесными блоками, независимо от наклона направляющей.
Указанная цель также достигается посредством конвейерной системы, отличающейся тем, что колесные блоки имеют подвесные несущие рычаги, соединенные друг с другом посредством позиционирующего механизма для выдерживания выбранного позиционного соотношения между колесными блоками так, что колесные блоки в целом сохраняют осевое расстояние друг от друга, которое в значительной степени соответствует указанному интервалу.
Посредством носителя и конвейерной системы по настоящему изобретению достигается конкретное расстояние и равномерное распределение нагрузки между колесными блоками, что обеспечивает безопасность и стабильность функции транспортировки и облегчает переход между направляющими разных типов.
Описание чертежей
Далее следует более подробное описание некоторых иллюстративных вариантов настоящего изобретения со ссылками на прилагаемые чертежи, на которых:
фиг.1 изображает вид сбоку первого варианта носителя для изделий.
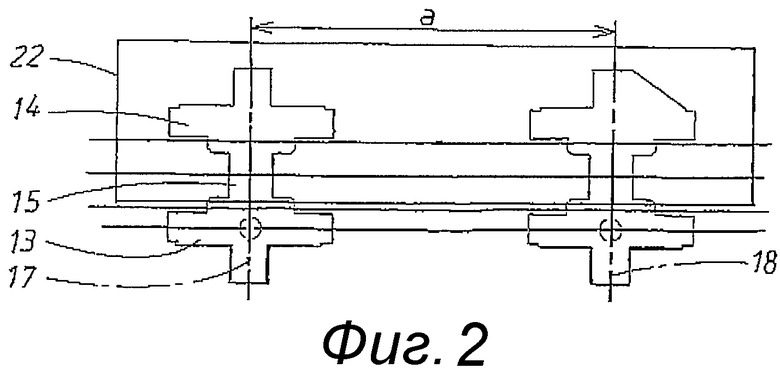
Фиг.2 - вид сверху носителя по фиг.1, расположенного на прямом участке направляющей.
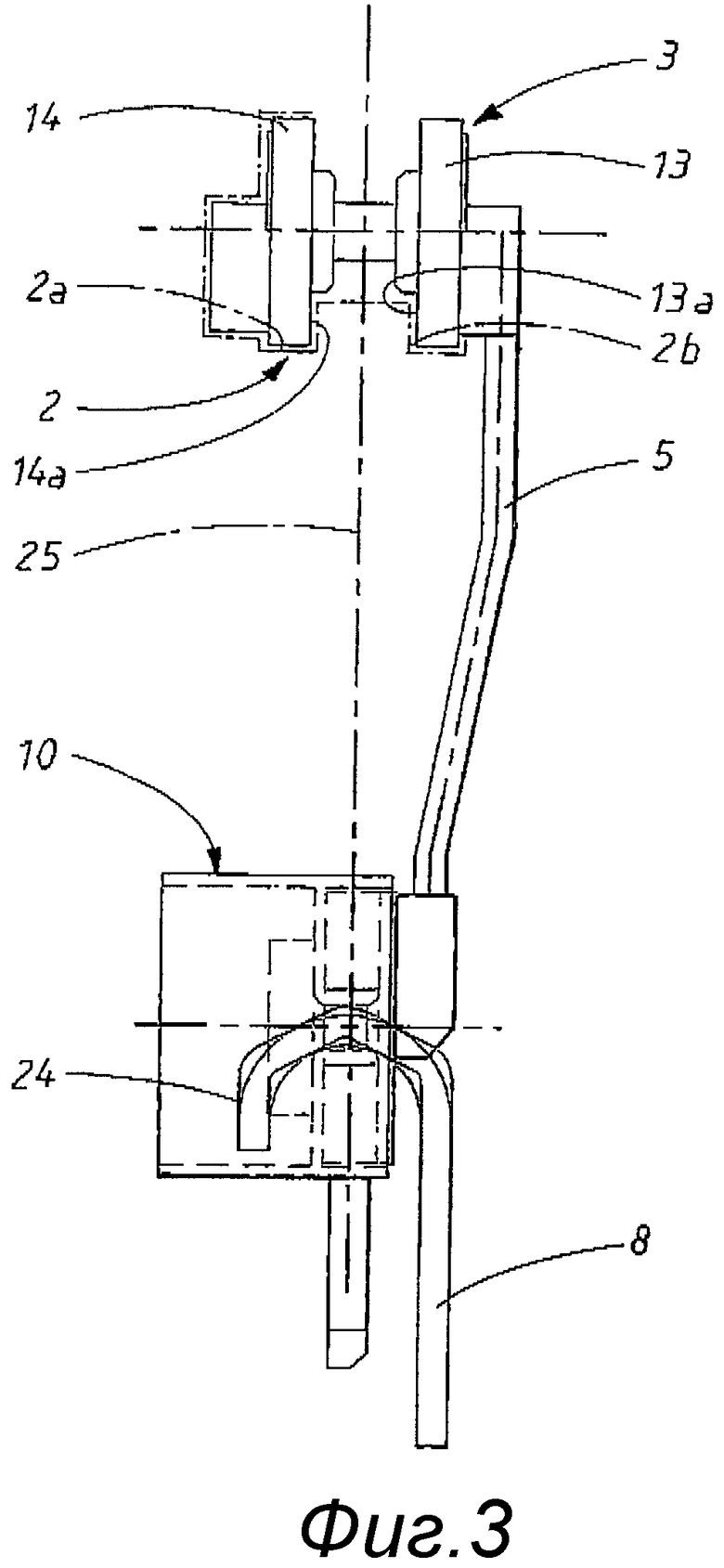
Фиг.3 - вид с торца носителя по фиг.1.
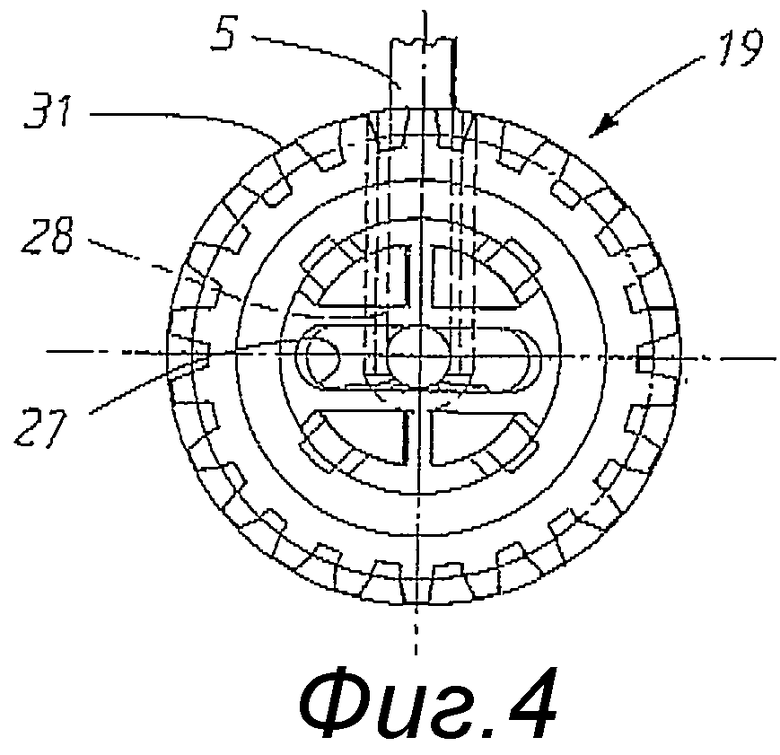
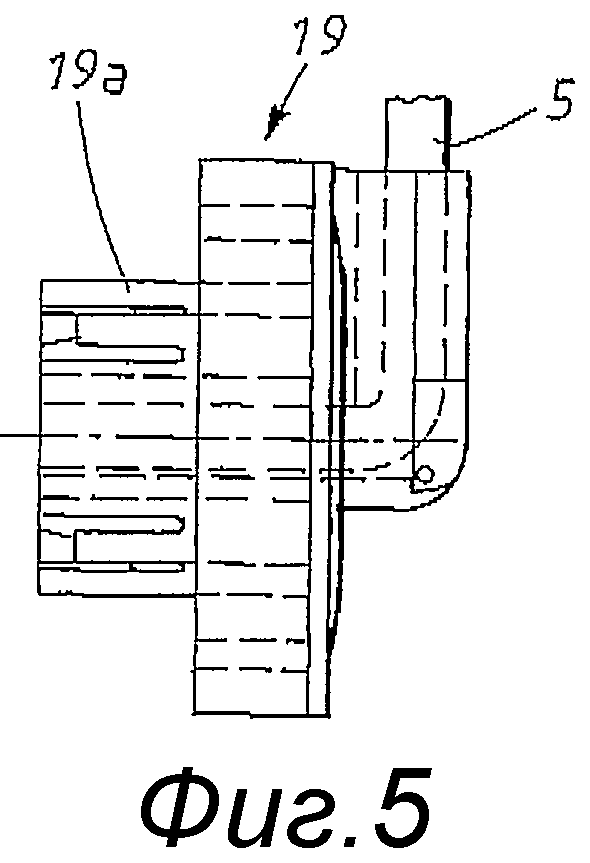
Фиг.4-7 - различные виды деталей носителя по первому варианту.
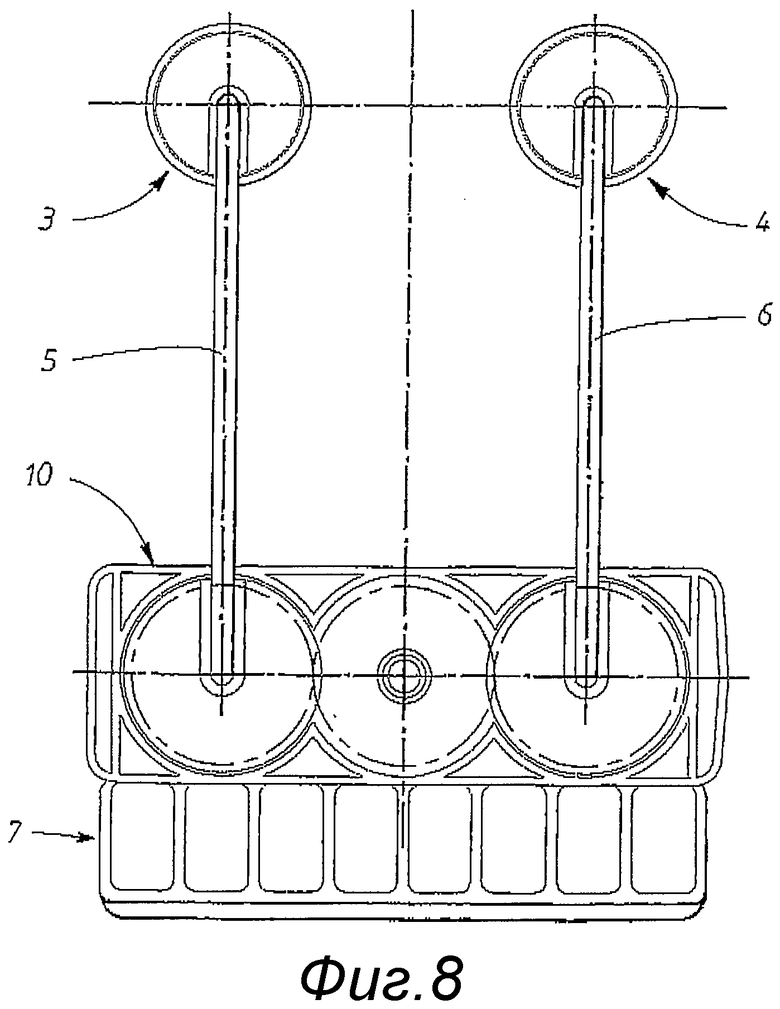
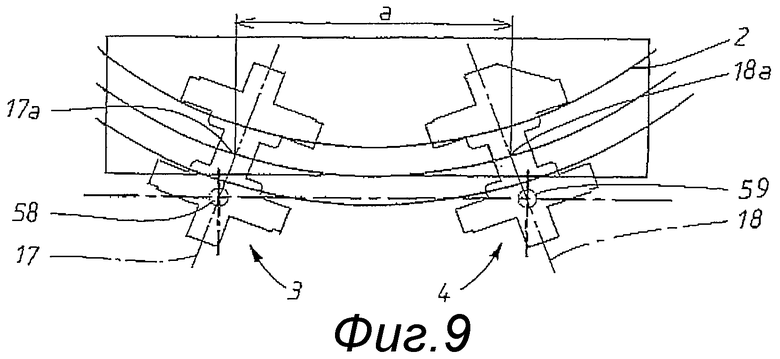
Фиг.8 и 9 - виды носителя для изделий, соответствующие видам по фиг.1 и 2, но где носитель находится на первом искривленном участке направляющей конвейера.
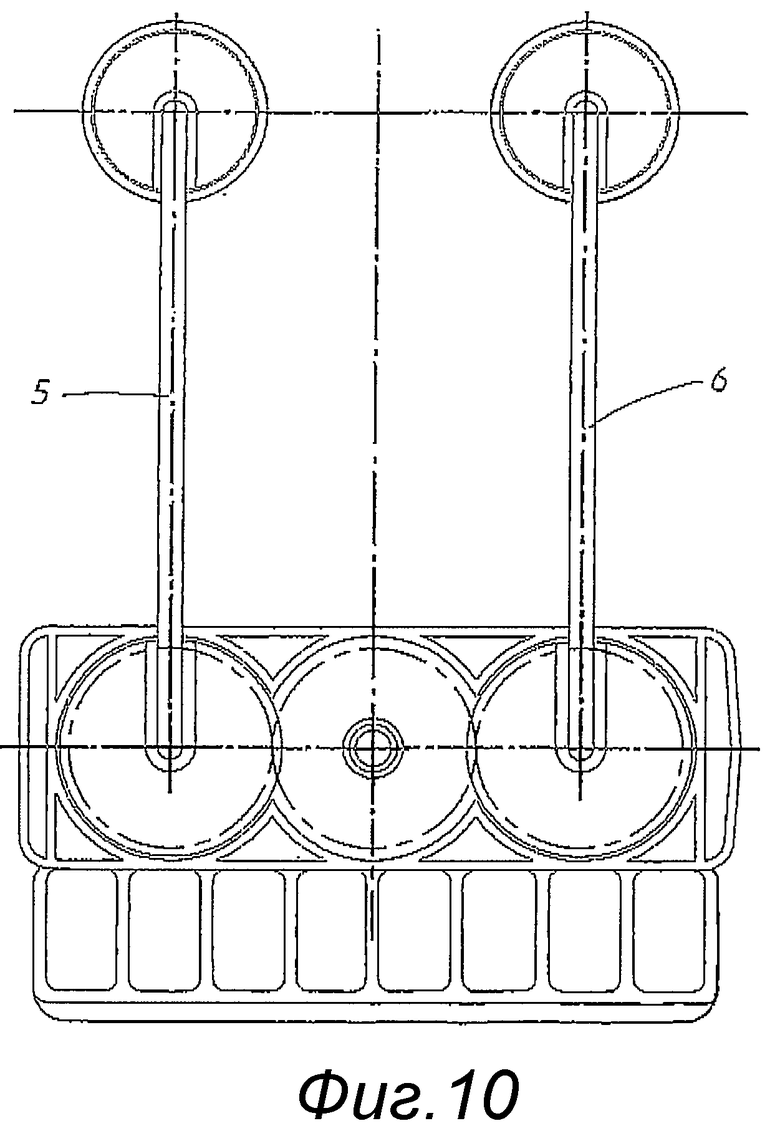
Фиг.10 и 11 - соответствующие виды, но где носитель находится на втором искривленном участке направляющей, где носитель изгибается в противоположном направлении.
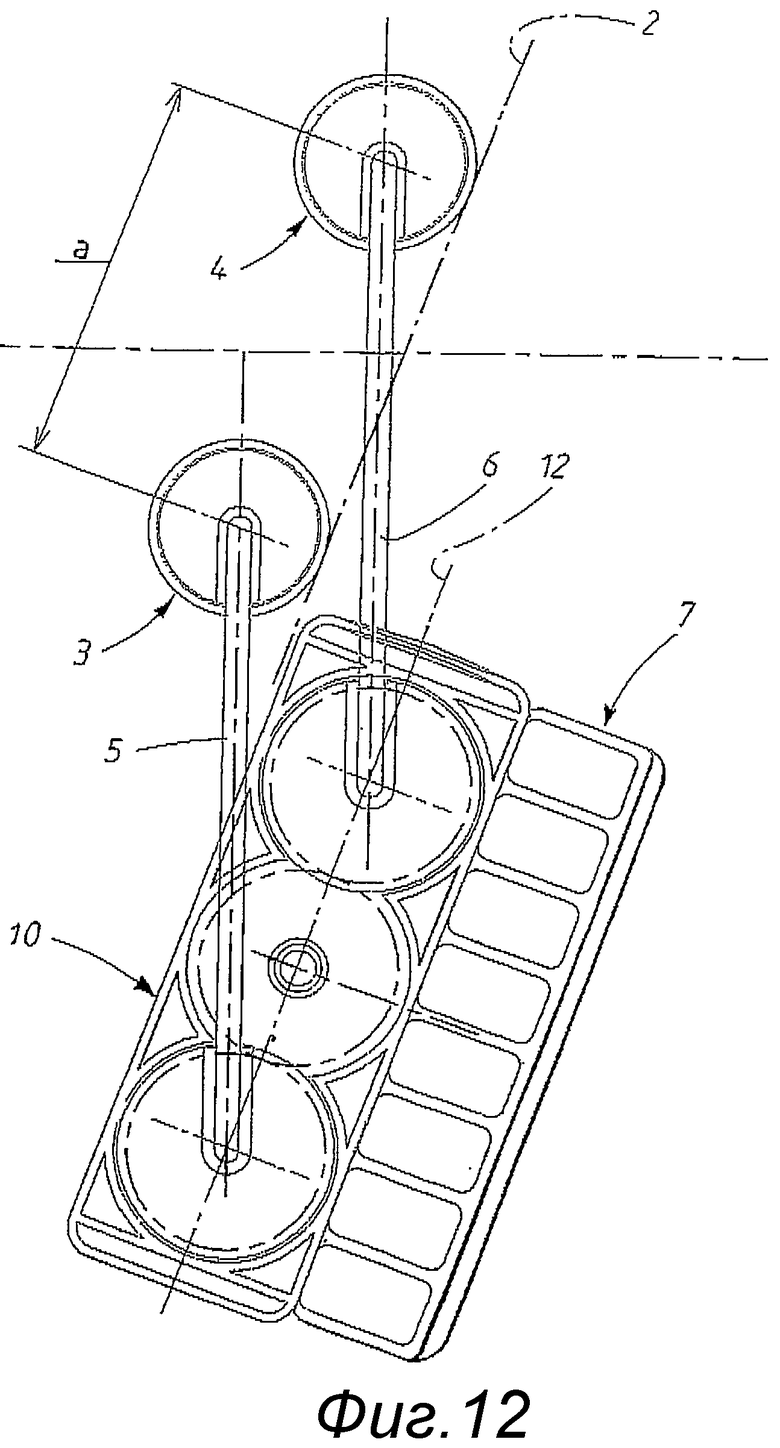
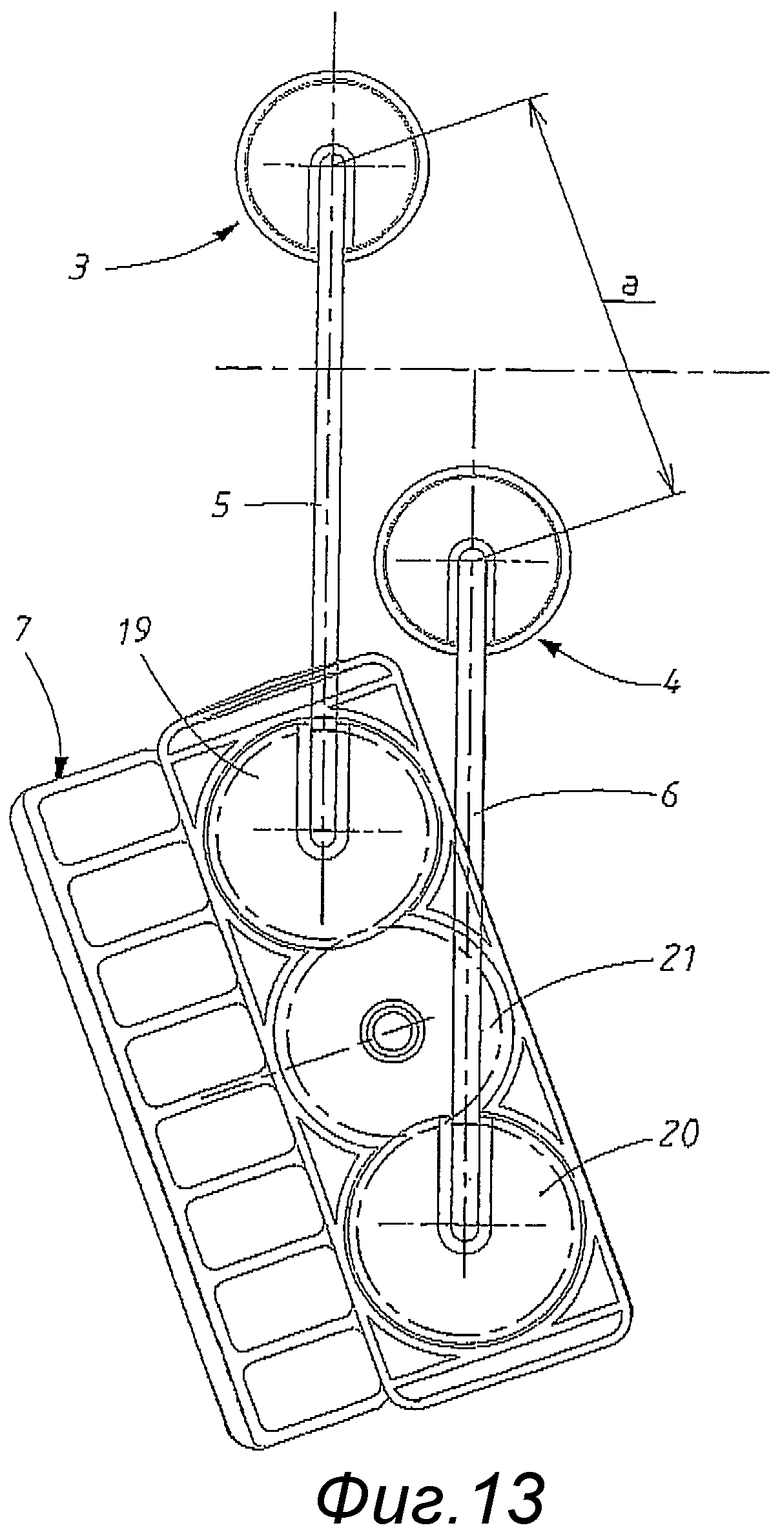
Фиг.12 и 13 - вид сбоку носителей в различных наклонных положениях на направляющей конвейера.
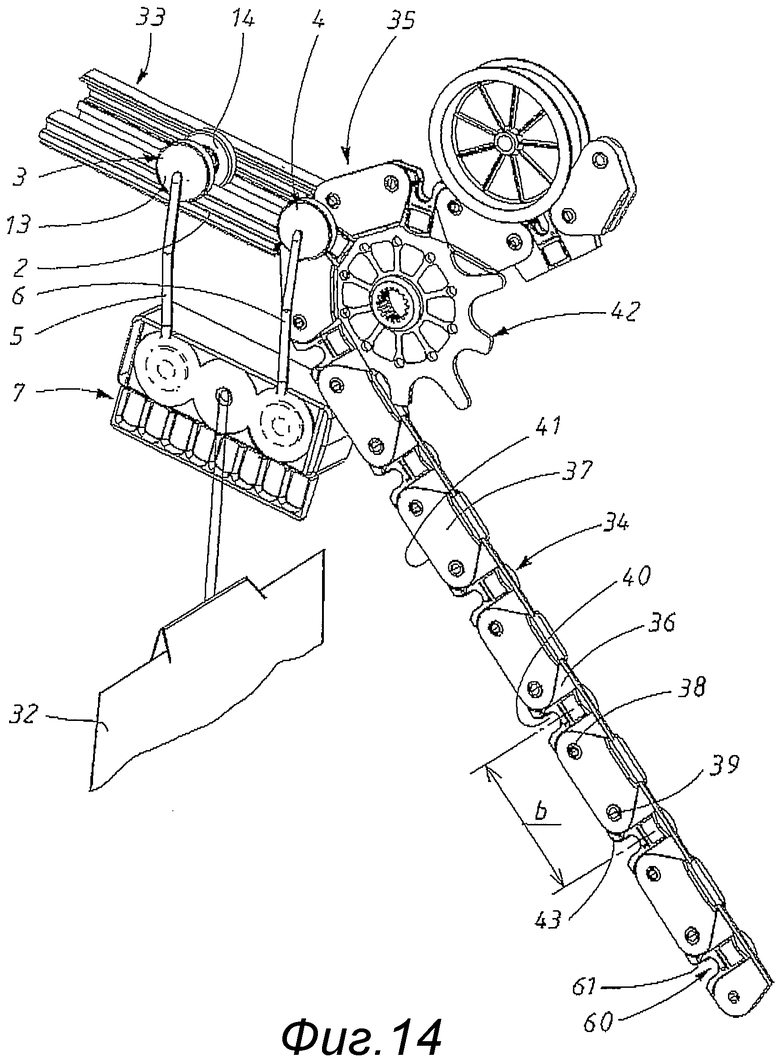
Фиг.14 - вид в перспективе части конвейерной системы с носителем по настоящему изобретению.
Фиг.15 - вид в перспективе конвейерной системы, где носитель находится на другой части направляющей.
Фиг.16 и 17 - вид сбоку и с торца соответственно носителя для изделий по второму варианту настоящего изобретения.
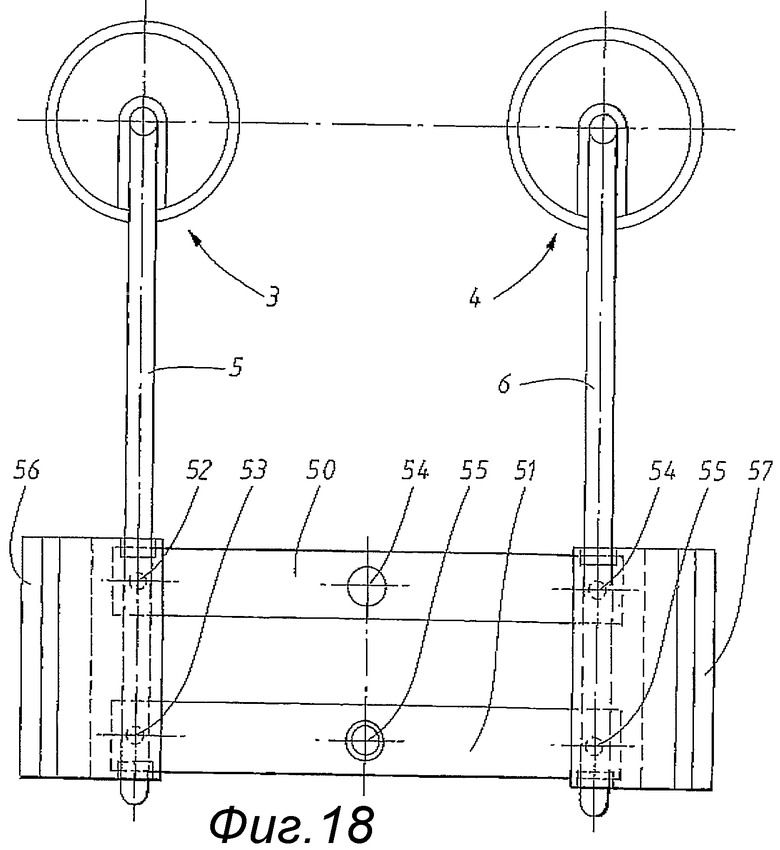
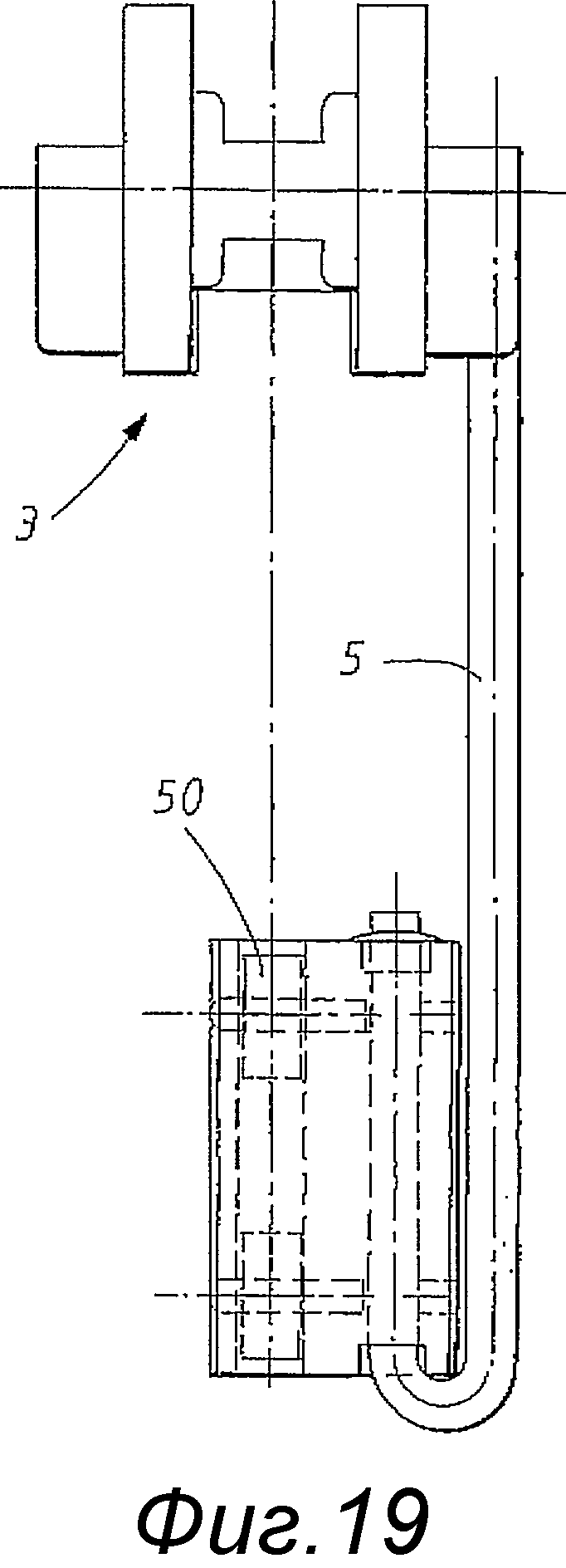
Фиг.18 и 19 - вид сбоку и с торца соответственно носителя по третьему варианту.
Описание предпочтительных вариантов
Сначала будет описана конструкция носителя 1 для изделий по первому варианту настоящего изобретения со ссылками на фиг.1-4. Он образует часть конвейерной системы, которая также содержит направляющую 2, по которой носитель должен перемещаться для транспортировки изделий между разными положениями вдоль направляющей. На фиг.1 и 2 это показано лишь схематически. Носитель выполнен как троллей, имеющий два колесных блока 3 и 4, которые образуют соединение между троллеем и направляющей. На каждом колесном блоке подвешен несущий рычаг 5, 6, к которому прикреплен один или более несущих элементов 7, 8 для транспортировки изделий вдоль направляющей 2. В показанном примере несущие элементы выполнены как множество петель 7 для крюков или зажимов и/или как подвесной, шарнирно установленный крюк 8.
Согласно настоящему изобретению несущие рычаги 5, 6 соединены друг с другом механическим позиционирующим механизмом 9, установленным в держателе 10, в котором шарнирно установлены несущие рычаги 5, 6. Держатель 10 поддерживает несущие элементы 7, 8. Позиционирующий механизм 9 состоит из параллельного направляющего механизма, который предназначен для поддержания в значительной степени постоянного углового соотношения между несущими рычагами 5, 6 и тем самым конкретного осевого расстояния между колесными блоками 3, 4, но с небольшими изменениями, как более подробно будет показано ниже. Этот механизм также поддерживает неизменное угловое соотношение, например соотношение параллельности, между соединительной осью 11 колесных блоков с одной стороны и осью симметрии 12 держателя с другой стороны, если смотреть в плане проекции на фиг.1. Каждый колесный блок 3, 4 содержит два ролика 13, 14, расположенных с интервалом между ними, при этом ролики в показанном примере жестко соединены друг с другом посредством участка шейки в форме оси 15. Ролики и ось 15 поддерживаются так, что они могут вращаться вокруг вала 16, который жестко соединен с каждым несущим рычагом 5, 6 и на практике может быть образован отогнутым участком несущего рычага, выполненного преимущественно из металла, являясь, например, стальным прутком, прутком из легкого сплава или трубой из легкого сплава, тогда как другие части каждого колесного блока выполнены из высокопрочной пластмассы. Ролики 13, 14 предназначены для качения в направляющей, которая образована направляющей 2 и на практике выполнена как профиль, как показано на фиг.2, как прямой участок направляющей конвейера, при этом геометрические оси вращения 17, 18 колесных блоков, образованные валом 16, параллельны друг другу.
Параллельный направляющий механизм 9 по первому варианту настоящего изобретения содержит шестеренный механизм, имеющий три шестерни 19, 20, 21, установленные в держателе с возможностью вращения. Из них две внешних шестерни 19, 20 зацеплены с промежуточной шестерней 21, при этом внешние шестерни имеют одинаковый диаметр, и каждая из них соединена с одним из несущих рычагов 5, 6 так, что они поворачиваются одновременно при качании несущих рычагов в плоскости проекции на фиг.1. На практике несущие рычаги на нижнем конце изогнуты под прямым углом и входят в сквозные отверстия в двух внешних шестернях, чтобы жестко передавать нагрузку от изделий, закрепленных на несущих элементах 7, 8, и через рычаги на колесные блоки 3, 4. Тот факт, что несущие рычаги 5, 6 сверху шарнирно подвешены на колесных блоках 3, 4 и прочно шарнирно закреплены в держателе 10 шестернями 19, 20, позволяет им совершать координированные колебательные движения, которые будут подробнее описаны ниже. Кроме того, на фиг.1-3 видно, что держатель 10 имеет коробчатый корпус с широкими, по существу плоскими торцевыми стенками 22, 23, которые образуют упорные поверхности или буферы, когда множество троллеев выстраиваются в одной конвейерной системе.
На фиг.1 и 3 показано, что один несущий элемент 8 в форме крюка 24 подвешен в центральном отверстии 21а в промежуточной шестерне 21. Несущий элемент 8 преимущественно предназначен для более тяжелых объектов и на своем нижнем конце может иметь приспособление для крепления объектов, например крюк или серьгу. На фиг.3 далее показано, что несущий рычаг 5 (несущий рычаг 6 не виден) отогнут от прямой вертикальной линии так, что центр тяжести нагрузки распределяется симметрично относительно вертикальной линии симметрии или плоскости 25 симметрии.
На фиг.2 и 3 видно, что помимо направляющей 2а для каждого ролика 13, 14 направляющая конвейера также содержит боковые направляющие 2b, которые взаимодействуют с одной боковой поверхностью 13а, 14а каждого ролика, чтобы позиционировать колесные блоки 3, 4 в направляющей.
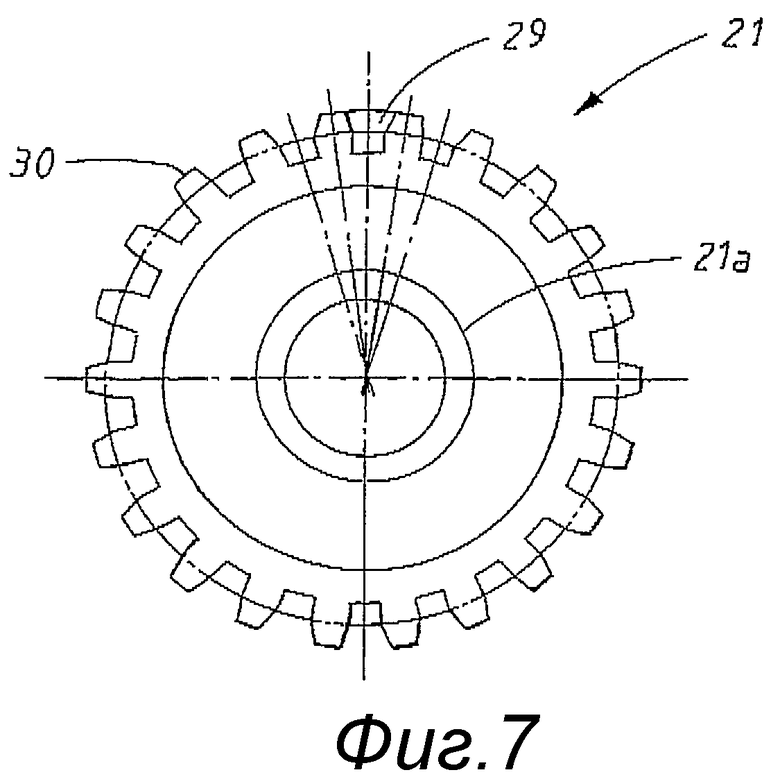
На фиг.4-7 показан конкретный вариант внешних шестерен (фиг.4-6) и промежуточной шестерни (фиг.7). На фиг.5 и 6 видно, что внешние шестерни имеют приводной элемент 26, в котором удерживается нижний конец каждого несущего рычага 5, 6 и который приводит шестерню в качающееся движение вместе с качанием несущего рычага вокруг соответствующего колесного блока. Также показано, что внешние шестерни 19 имеют центральное отверстие 27 специфичной формы, в которое введен отогнутый концевой участок 28 несущего рычага 5. Более конкретно, отверстие выполнено по существу круглым на том конце, в который вставляется несущий рычаг, но расширяется на конус, если смотреть в плоскости под прямым углом к основному участку несущего рычага. Это позволяет концу 28 несущего рычага перемещаться на определенный угол, чтобы два несущих рычага могли закручиваться по существу вокруг их продольных осей, чтобы обеспечить возможность поворота колесных блоков при прохождении криволинейного участка и изменять осевое расстояние а в узких пределах, как показано ниже. Шестерни 19-21, кроме того, имеют несущие участки 19а, 21а для опоры с возможностью вращения на соответствующих участках держателя 10. Кроме того, как показано на фиг.7, поворотное движение шестерен ограничено за счет того, что одна из шестерен (в показанном примере - промежуточная шестерня 21) имеет запертый участок 29, расположенный на ее зубчатой периферии 30 так, что в точке контакта с одной или другой внешней шестерней 19, 20 зацепление для зубьев 31 внешней шестерни становится невозможным. Это ограничивает параллельное движение до угла несколько менее 180°, чтобы предотвратить запирание в положениях пределов поворота. Такое ограничение предельных положений может быть достигнуто разными способами, например с помощью упоров на несущих рычагах 5, 6.
На фиг.8 и 9 показана ситуация, когда носитель 1 расположен на криволинейном участке направляющей 2 конвейерной системы. Тот факт, что несущие рычаги 5, 6 имеют возможность, как описано выше, закручиваться в определенных пределах вокруг их продольных осей, означает, что два колесных блока 3, 4 могут поворачиваться, и их оси вращения 17, 18 могут отклоняться в относительно большой степени от положения, в котором они проходят параллельно друг другу, частично для поворота на направляющей и частично для небольшой регулировки осевого расстояния а, на фиг.9 - для небольшого уменьшения расстояния а. Расстояние а здесь относится к расстоянию между осями 17, 18 в их симметричных средних точках 17а, 18а на корпусе 15 оси.
Как показано на фиг.10 и 11, допустим и соответствующий поворот осей вращения 17, 18 колесных блоков в противоположном направлении, когда носитель проходит участок направляющей, изогнутый в противоположном направлении. В обоих случаях центр поворота 58, 59 для оси вращения 17, 18 не совпадает с центром симметрии колесных блоков 3, 4, что приводит к изменению осевого расстояния, что важно для конвейеров цепного типа, как показано ниже.
Таким образом, поворот колесных блоков 3, 4, показанный на фиг.9 и 11, достигается через взаимодействие конвейера с его направляющими гранями 2b с боковыми сторонами 13а, 14а роликов.
На фиг.12 показана функция параллельности носителя для изделий по настоящему изобретению на сильно наклоненном участке конвейерной направляющей 2. Функция параллельности служит для удержания несущих рычагов 5, 6 в неизменном угловом положении относительно друг друга, в приведенном примере по существу параллельно друг другу, что позволяет сохранить межцентровое расстояние а между колесными блоками 3, 4. Кроме того, ось симметрии 12 держателя проходит по существу параллельно направляющей 2 даже на наклонном участке. Таким образом, достигается постоянное управляемое относительное положение держателя 10 и несущих элементов 7, что дает равномерное распределение нагрузки на несущие рычаги 5, 6 и на колесные блоки 3, 4. Торцевые стенки 22, 23, таким образом, поворачиваются в направлении конвейерной направляющей, и в результате, при скоплении носителей на одном участке направляющей, их торцевые стенки повернуты одна к другой и действуют как буферы, исключая риск захвата между троллеями.
На фиг.13 показано, как регулируется носитель для изделий при наклоне в противоположную сторону, одновременно сохраняя параллельность между несущими рычагами 5, 6 за счет зацепления внешних шестерен с промежуточной шестерней 21, при этом сохраняется осевое расстояние между колесными блоками 3, 4.
Независимо от направления и величины наклона постоянное зацепление с промежуточной шестерней 21 всегда удерживает внешние шестерни 19, 20 в одном и том же поворотном положении относительно друг друга, что позволяет сохранить неизменным осевое расстояние а.
На фиг.14 показан участок конвейерной системы или установки для транспортировки изделий, которыми могут быть любые объекты, например маты 32. Конвейерная система может относиться к типу, имеющему, например, множество троллеев 1, из которых показан лишь один, которые транспортируются по главной линии (не показана) до отводных линий 33, 34 (из которых показана только одна), и где троллеи переходят на каждую отводную линию для конкретной обработки на рабочей станции, прежде чем вернуться обратно на основную линию. Пример такой установки раскрыт в US 4817778 A.
С основной линии носители 1 для изделий переходят на отводную линию, которая в показанном примере состоит из конвейеров 33, 34 двух типов и переносящего устройства 35 для переноса троллеев с одного конвейера 33 на другой конвейер 34. В показанном примере один конвейер содержит вышеописанную направляющую для роликов в виде имеющего соответствующую форму профильного участка, описанного выше, который образует поверхности 13, 14 качения для колесных блоков 3, 4 и направляющие грани для направления роликов в боковом направлении. Второй конвейер 34 в показанном примере содержит цепной конвейер, который в преимущественном примере может иметь такую же конструкцию, что и в более раннем патентном описании, в форме замкнутой петли. В приводимом примере цепной конвейер содержит множество звеньев 36, 37, которые шарнирно соединены друг с другом соединительными пальцами 38, 39 для шарнирного перемещения или поворотного перемещения в конкретной плоскости, но они направляются взаимодействующими скользящими поверхностями так, что возвратно-поступательные перемещения между звеньями в других плоскостях сведены к минимуму. Имеются звенья двух типов, которые далее именуются несущим звеном 36 и промежуточным звеном 37. Цепной конвейер 34 предназначен для приема и удержания транспортируемых и неподвижных троллеев и для подачи их посредством взаимодействия с их колесными блоками известным способом в соответствии с предыдущим патентным описанием. Для этого несущие звенья имеют удерживающие элементы или приводные элементы, которые предназначены для приема и удержания транспортируемых колесных блоков 3, 4 троллеев и для их перемещения. В показанном примере эти удерживающие элементы содержат отверстия 40, которые в положении освобождения открыты наружу, а в положении удержания, т.е. в положении транспортировки или когда конвейер неподвижен на рабочей станции, обеспечивают удержание посредством замка 60. На практике несущие звенья рядом с отверстием имеют ширину, меньшую, чем интервал между роликами колесных блоков, то есть длины оси 15, чтобы колесный блок 3, 4 удерживался между роликами 13, 14 с зазором, который позволяет колесным блокам 3, 4 несколько поворачиваться при упомянутом выше закручивании несущих рычагов 5, 6.
В приведенном примере первый конвейер 33 на отводной линии наклонен вниз к загрузочному устройству 35 и открыт в направлении третьего конвейера. Передний колесный блок 4 троллея удерживается неподвижно продольной кромкой 41 промежуточных звеньев, которая образует упорную кромку, в которую упирается передний колесный блок 4 до тех пор, пока цепной конвейер, посредством приводного колеса 42, не продвинется вокруг периферии этого колеса так, что отверстие 40 следующего несущего звена 36 придет в положение непосредственно напротив переднего захватываемого участка переднего колесного блока, т.е. напротив оси. Запирающий механизм 60 для отверстия 40 тем самым переходит в открытое положение, т.е. в положение освобождения, чтобы захватываемый участок колесного блока закатился в отверстие и был захвачен движением цепного конвейера. Например, запирающий механизм 60 выполнен подпружиненным, поэтому он стремится заблокировать отверстие защелкой 61. Когда ось 15 снаружи ударяет по кромке защелки, она сдвигается в сторону, и колесный блок получает возможность входа в отверстие и удержания в нем.
В подающем устройстве (не показано) каждый носитель для изделий подается на направляющую для роликов, когда приводимая в действие защелка открывается.
Колесные блоки 3, 4 троллея расположены на осевом расстоянии а друг от друга, которое выбрано так, чтобы соответствовать интервалу b между удерживающими элементами на несущих звеньях, т.е. между отверстиями. В приведенном примере оно равно расстоянию между ближайшими звеньями, но в принципе это расстояние может быть кратным расстоянию между несущими звеньями. На фиг.14 также показано, что в определенных пределах параллельная функция создает заранее определенное осевое расстояние а, то есть расстояние между осями 17, 18 колесных блоков, независимо от наклона направляющей 2 конвейера. Как описано выше, это относится к прямым, т.е. линейным участкам направляющей 2, поэтому первый конвейер на своем участке, расположенном рядом с загрузочным устройством, является прямым. Это значит, что выбранный интервал поддерживается точно, поэтому колесные блоки могут входить в отверстия 40 в цепном конвейере по одному и в правильном положении. Троллей в целом и держатель 10 с несущими элементами 7, кроме того, принимает управляемое положение, поскольку троллей в целом постоянно сохраняет геометрическую форму параллелограмма, имеющего разные углы, в зависимости от наклона направляющей конвейера. На искривленных участках цепи интервал b временно уменьшается, и осевое расстояние а между колесными блоками соответственно регулируется, благодаря удержанию в отверстиях 40 и закручиванию несущих рычагов 5, 6, описанному выше. Удержание колесных блоков 3, 4 фактически осуществляется с некоторым зазором, обеспечивающим возможность такого закручивания.
На фиг.15 показан один из троллеев 1 в положении в цепном конвейере, где колесные блоки удерживаются в отверстиях 40, и несущие рычаги 5, 6 расположены параллельно, поэтому троллей в целом принимает управляемое положение с держателем 10 и цепочкой несущих элементов 7, проходящими параллельно основному направлению цепного конвейера, что позволяет равномерно распределить нагрузку между колесными блоками 3, 4.
На фиг.16 и 17 показан механизм позиционирования по второму варианту настоящего изобретения, где шестеренчатый механизм заменен параллельным рычагом 45, который соединяет два несущих рычага 5, 6 друг с другом через шарниры 46, 47, расположенные на одинаковом расстоянии от центров поворота 48, 49 несущих рычагов. Для обеспечения несущей способности держателя имеются круглые элементы, имеющие форму колеса, которые могут иметь такую же конструкцию, что и внешние шестерни 19, 20, но без зубьев. В остальных отношениях троллей может иметь такую же конструкцию, что и первый вариант, с той же способностью к закручиванию несущих рычагов 5, 6 вокруг их продольных осей.
На фиг.18, 19 показан третий вариант троллея, имеющего два параллельных рычага 50, 51, шарнирно установленных на расстоянии друг от друга вдоль точек 52, 53, 54, 55 шарнирного соединения, которые расположены симметрично на несущих рычагах 5, 6. В этом случае коробчатый держатель заменен на два буферных элемента 56, 57. Параллельные рычаги 50, 51 имеют два фиксирующих отверстия для подвески более тяжелых изделий.
Во втором и третьем вариантах выполняется та же функция, что и в первом, а именно - позиционирование несущих рычагов так, чтобы колесные блоки 3, 4 сохраняли по существу неизменное расстояние между собой, независимо от углового положения между несущими рычагами и направляющей конвейера. И при горизонтальном, и при вертикальном изгибе конвейера сохраняемое осевое расстояние может автоматически регулироваться в небольшом диапазоне через закручивание несущих рычагов 5, 6 вокруг их продольных осей.
Настоящее изобретение не ограничено описанными выше вариантами, но может быть модифицировано, не выходя из объема, определяемого прилагаемой формулой. Например, троллей в принципе может иметь три и более колесных блока с подвешенными на них несущими рычагами. Кроме того, угол между продольными осями несущих рычагов может быть не равен 0°, т.е. рычаги могут быть не параллельными. Во втором и третьем вариантах в принципе между колесными блоками может проходить параллельная штанга. Для базовой функции позиционирования функция закручивания для регулировки осевого расстояния не обязательна. Если функция закручивания используется, она может быть реализована каким-либо иным способом, например угловым шарниром между верхним концом несущих рычагов и осью вращения колесных блоков.
Движение троллея по другим участкам направляющей, например по горизонтальным участкам и поднимающимся участкам, может осуществляться разными способами, например приводной цепью, которая перемещает троллей, например за один колесный блок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвейерная система для сборки, регулировки и электротренировки видеоаппаратуры | 1990 |
|
SU1789450A1 |
| УСТРОЙСТВО ДЛЯ ПРОДОЛЬНОЙ РАСПИЛОВКИ ТУШ КРУПНОГО РОГАТОГО СКОТА И Т. П. | 1950 |
|
SU92090A1 |
| КОНВЕЙЕРНАЯ СИСТЕМА ДЛЯ НАКОПЛЕНИЯ ТРАНСПОРТИРОВКИ ЗАКРЕПЛЕННОГО НА ТРОЛЛЕЯХ ШТУЧНОГО ГРУЗА | 1969 |
|
SU241990A1 |
| Подвесная конвейерная система для транспортировки и взвешивания закрепленных на троллеях штучных грузов | 1976 |
|
SU612864A1 |
| НЕСУЩЕЕ ЗВЕНО, КОНВЕЙЕРНАЯ ЦЕПЬ, СОДЕРЖАЩАЯ МНОЖЕСТВО НЕСУЩИХ ЗВЕНЬЕВ И СИСТЕМА ТРАНСПОРТИРОВКИ МАТЕРИАЛОВ И ДЕТАЛЕЙ, СОДЕРЖАЩАЯ МНОЖЕСТВО КОНВЕЙЕРНЫХ ЦЕПЕЙ | 2011 |
|
RU2563474C2 |
| КОНВЕЙЕР ДЛЯ СБОРКИ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО ЖГУТОВ ПРОВОДОВ | 2009 |
|
RU2399107C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ АВТОМОБИЛЬНЫХ КУЗОВОВ | 2011 |
|
RU2585946C2 |
| Роторно-конвейерная линия | 1990 |
|
SU1722864A1 |
| Установка для мойки изделий | 1989 |
|
SU1688946A1 |
| Наклонный цепной толкающий конвейер | 1978 |
|
SU766557A1 |





Носитель для изделий, выполненный как троллей и имеющий возможность перемещения вдоль направляющей в конвейерной системе, имеет два колесных блока (3, 4), катящиеся по направляющей (2). На каждом колесном блоке подвешен несущий рычаг (5, 6) для транспортируемых изделий. Несущие рычаги (5, 6) соединены установленным в держателе (10) позиционирующим механизмом (9), который выдерживает расстояние (а) между колесными блоками независимо от наклона направляющей. Обеспечивается безопасность и стабильность функции транспортировки. 2 н. и 8 з.п. ф-лы, 19 ил.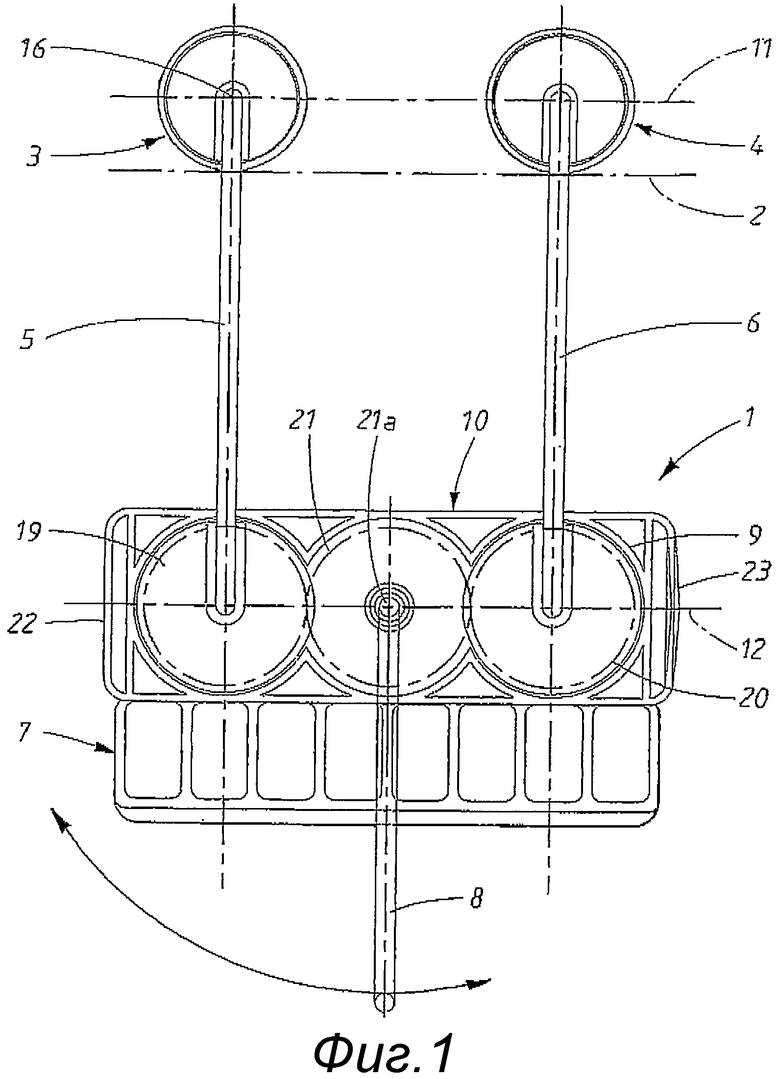
| Устройство для транспортирования и передачи грузов на палетах между рабочими позициями | 1988 |
|
SU1553480A1 |
| Подвеска подвесного конвейера | 1978 |
|
SU854825A1 |
| US 4936222 A, 26.06.1990 | |||
| US 3759190 A, 18.09.1973 | |||
| DE 19517832 C1, 05.12.1996. | |||

