Предлагаемое устройство может быть применено при контроле радиолокационных и тепловых головок самонаведения ракет.
Одним из наиболее важных параметров головки самонаведения при решении задачи наведения на воздушную цель с точки зрения достижения наибольшей вероятности ее поражения является ошибка сигнала управления синхронная с колебаниями объекта, на котором она устанавливается.
Синхронная ошибка сигнала управления головки самонаведения складывается из ошибки, вносимой обтекателем и ошибки привода стабилизации и управления антенным устройством.
В связи с этим при изготовлении головок самонаведения производят контроль величины синхронной ошибки на соответствие заданной величины.
Существующие устройства, предназначенные для контроля синхронной ошибки головки самонаведения, состоят из синусного стенда со столом, который совершает колебания, имитирующие колебания объекта испытываемой головки самонаведения и имитатора цели.
Такое устройство позволяет измерять синхронную ошибку головки самонаведения при фиксированных углах пеленга антенного устройства, причем для изменения углов пеленга необходимо каждый раз закреплять испытываемую головку на столе синусного стенда в положение, при котором ее продольная ось образует желаемый угол по отношению к оси рупора имитатора цели.
Существующее устройство не позволяет измерить величину синхронной ошибки при непрерывно изменяющемся угле пеленга, а для измерения величины синхронной ошибки при различных углах пеленга требует большой трудоемкости и неудобно в эксплуатации.
Предлагаемое устройство измерения свободно от перечисленных недостатков и позволяет измерять синхронную ошибку головки самонаведения в функции от угла пеленга.
Кинематическая схема предлагаемого устройства приведена на чертеже1.
На чертеже приняты следующие обозначения:
1 - синусный стенд;
2 - стол синусного стенда;
5 - испытываемый прибор;
4 - имитатор цели;
5 - платформа;
6 - поворотный механизм;
7 - датчик угла.
Из чертеже очевидно, что предложенное устройство отличается от уже существующего введением дополнительной платформы, которая вращается вокруг оси, совпадающей с осью колебаний стола синусного стенда с помощью червячного механизма, закрепленного на столе синусного стенда, а также введением датчика угла, измеряющего угол поворота платформы относительно стола синусного стенда.
Измерение синхронной ошибки с помощью предлагаемого устройства производится следующим образом:
закрепляют испытываемую головку самонаведения на платформе, производят ее включение, направляют антенное устройство на имитатор цели, включают синусный стенд и одновременно производят разворот платформы 5 с помощью поворотного механизма 6 относительно стола синусного стенда, с определенной скоростью в пределах углов отклонения антенного устройства испытываемой головки самонаведения. При этом с помощью измерительных приборов или самописцев измеряют (регистрируют) сигналы, пропорциональные углу поворота платформы (антенного устройства) относительно стола синусного стенда и соответствующие этим углам синхронные ошибки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТЕПЛОРАДИОТЕХНИЧЕСКИХ ИСПЫТАНИЙ РАДИОПРОЗРАЧНЫХ ОБТЕКАТЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2525844C1 |
| Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом с радиолокационным визиром | 2015 |
|
RU2629709C2 |
| СТЕНД ДЛЯ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2338992C1 |
| МОНОИМПУЛЬСНОЕ РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО СОПРОВОЖДЕНИЯ ПО НАПРАВЛЕНИЮ | 2004 |
|
RU2273863C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИЗМЕРЕНИЙ РАДИОТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК ГОЛОВОК САМОНАВЕДЕНИЯ РАКЕТ | 2012 |
|
RU2526495C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| СПОСОБ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2610877C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| Имитатор цели с механическим доворотом | 2018 |
|
RU2690965C1 |
Изобретение может быть использовано при контроле радиолокационных и тепловых головок самонаведения ракет. Технический результат заключается в обеспечении возможности измерения синхронных ошибок в зависимости от угла пеленга. Сущность изобретения состоит в том, что в устройстве, содержащем имитатор цели, на столе синусного стенда установлен поворотный механизм с вращающейся платформой и датчик угла ее разворота относительно стола, при этом ось вращения платформы и ось колебаний стола совмещены. 1 ил.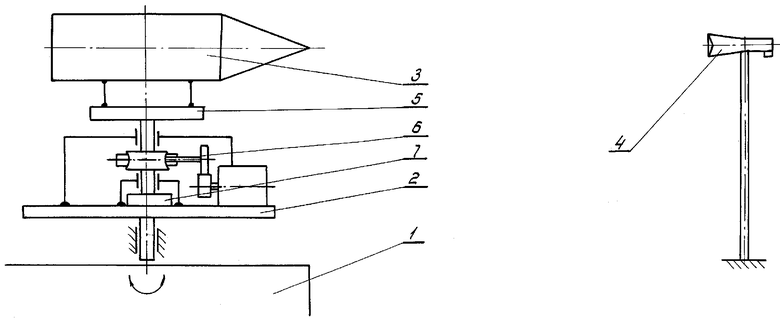
Устройство для контроля синхронных ошибок головки самонаведения, содержащее синусный стенд со столом и имитатор цели, отличающееся тем, что, с целью обеспечения возможности измерения синхронных ошибок в зависимости от угла пеленга, в нем на столе установлен поворотный механизм с вращающейся платформой и датчик угла ее разворота относительно стола, при этом ось вращения платформы и ось колебаний стола совмещены.

