Изобретение относится к области техники, занимающейся разработкой координаторов головок самонаведения.
Как показывает теория и практика разработки самонаводящихся ракет, хорошие тактико-технические данные комплекса могут быть получены лишь при обеспечении захвата и автосопровождения цели в пределах больших углов между продольной осью ракеты и направлением на цель.
Конструктивная проработка координаторов на большие углы (более 50°) отклонения по обеим осям показывает, что простой двухосный карданов подвес не может обеспечить таких углов прокачки во всем конусе обзора. При этом существенным является то, что получение больших углов отклонения по наружной оси карданова подвеса практически на любые углы (до 90° и даже более) может быть сравнительно легко конструктивно реализовано. В связи с этим представляется целесообразным, используя маневр ракеты по крену, ограничить углы отклонения координатора по внутренней оси его карданова подвеса до величины порядка 15 - 20° при сохранении обзора во всем конусе.
Ниже предлагается устройство гироскопического стабилизатора головки самонаведения с ограниченной (15 - 20°) прокачкой по внутренней оси карданова подвеса координатора, позволяющее осуществлять выставку координатора на цель после старта ракеты и ее дальнейшее автосопровождение при любых (не менее 60°) углах между осью ракеты и направлением на цель.
Описание устройства
Предлагаемый гироскопический стабилизатор головки самонаведения (см. чертеж) состоит из координатора цели (1), установленного в двухстепенном кардановом подвесе, по осям которого установлены двигатели (2), (3) и датчики угла (4), (5), и чувствительного элемента - трехстепенного управляемого гироскопа, состоящего, в свою очередь, из гиромотора (6), установленного в двухстепенном кардановом подвесе, по осям которого установлены датчики угла (7), (8) и датчики момента (9), (10); корпуса (11) карданова подвеса гироскопа, который может поворачиваться относительно координатора цели вокруг оси, параллельной внутренней оси карданова подвеса координатора, на углы не менее 60° и имеет по этой оси двигатель (12) и датчик угла (13).
Двигатели (2), (3) совместно с датчиками угла (7), (8) и соответствующими усилителями образуют двухканальную следящую систему обычного двухосного индикаторного гироскопического стабилизатора.
В режиме работы ракеты в подвеске на двигатель (12) подается через соответствующий усилитель напряжение с датчика угла (5). При этом осуществляется доворот корпуса (11) в такую сторону, чтобы поворот координатора по внутренней оси, благодаря действию следящей системы с двигателем (2), был близок к нулю, а вектор кинетического момента гироскопа  под действием управляющих моментов от датчиков (9), (10) был направлен на цель. После чего осуществляется старт ракеты.
под действием управляющих моментов от датчиков (9), (10) был направлен на цель. После чего осуществляется старт ракеты.
После старта ракеты ее автопилот, используя сигналы с датчиков угла (5), (4), (13), управляет движением ракеты по крену таким образом, чтобы суммарный угол отклонения, измеряемый датчиками (13) и (5) был минимальным.
После отработки начального рассогласования по датчикам угла (13) и (5) двигатель (12) переключается на обнуление угла, измеряемого датчиком (13), благодаря чему осуществляется с точностью до ошибок соответствующих следящих систем совмещение, равносигнального напряжения координатора цели с вектором кинетического момента гироскопа, который ранее был выставлен в направлении на цель и "запомнил" его. После захвата цели сигналы ошибок углового сопровождения цели начинают поступать на моментные датчики (9), (10) и осуществляют коррекцию координатора, обеспечивающую дальнейшее сопровождение цели.
Изобретение относится к области техники, занимающейся разработкой координаторов головок самонаведения. Сущность: стабилизатор содержит координатор, установленный в двухосном кардановом подвесе, датчики углов и моментов, установленные на внутренней и внешней осях карданового подвеса, и трехстепенный управляемый гироскоп. При этом корпус гироскопа установлен во вспомогательной раме, имеющей датчики угла и момента, и ось вращения которой параллельна внутренней оси карданова подвеса. Кроме того, выход датчика угла внутренней оси карданова подвеса соединен со входом датчика момента вспомогательной рамы. Технический результат: обеспечение запоминания направления на цель в пределах большого телесного угла при ограниченном угле прокачки по внутренней оси карданова подвеса.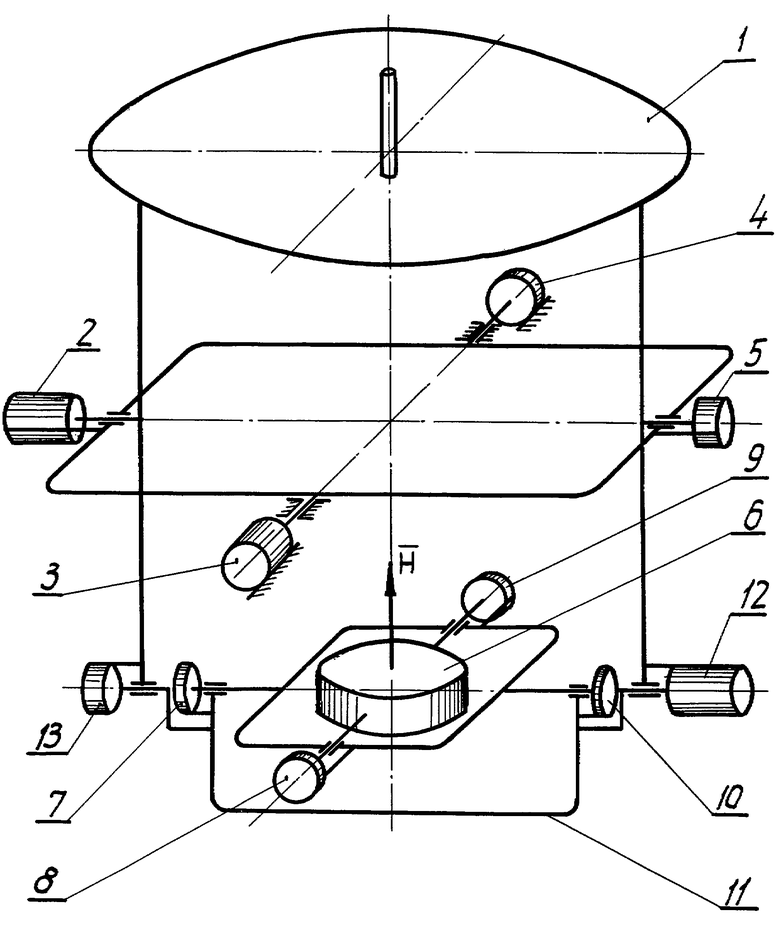
Двухосный гироскопический стабилизатор головки самонаведения ракеты, управляемой по крену по сигналам с датчиков углов координатора, содержащий координатор, установленный в двухосном кардановом подвесе, датчики углов и моментов, установленные на внутренней и внешней осях карданового подвеса, и трехстепенный управляемый гироскоп, отличающийся тем, что, с целью обеспечения запоминания направления на цель в пределах большого телесного угла при ограниченном угле прокачки по внутренней оси карданова подвеса, в нем корпус гироскопа установлен во вспомогательной раме, имеющей датчики угла и момента, ось вращения которой параллельна внутренней оси карданова подвеса, при этом выход датчика угла внутренней оси карданова подвеса соединен со входом датчика момента вспомогательной рамы.

