Изобретение относится к области гидроакустики, а именно к гидроакустическим навигационным системам с донными маяками, которые используются для прохождения по заданному маршруту с целью обеспечения безопасности плавания в районах интенсивного судоходства, минных полей и других навигационных опасностей в условиях плохой оптической и радиолокационной видимости или в подводном положении корабля.
Траектория корабля может быть задана как геометрическое место точек, для которых значение некоторой функции координат корабля относительно маяков остается постоянным или изменяется по заданному закону, а приращение этой функции (или отклонение от заданной величины) может быть использовало как сигнал для управления перекладкой руля.
Известно несколько гидроакустических способов и, соответственно, систем, решающих эту задачу.
Во-первых, это способы определения координат объекта относительно донных маяков-ответчиков и системы определения координат.
К ним относятся:
- дальномерная гидроакустическая навигационная система по патенту США №3.460.060 Н. кл.340-3, в которой измеряются расстояния до трех маяков-ответчиков (R1, R2, и R3) и вычисляются функции

где D1,2 и D1,3 - расстояния между маяками 1 и 2 или 1 и 3;
- дальномерная гидроакустическая навигационная система, в которой осуществляются аналогичные измерения (R1, R2 и R3) и арифметические операции, а также вычисляются прямоугольные координаты объекта в системе координат, связанной с донными маяками-ответчиками. Отклонение параметров Y1,2 и Y1,3 или прямоугольных координат от заданных значений свидетельствуют об отклонении корабля от заданной траектории.
Недостатком такого способа определения траектории и систем, его реализующих, является сложность аппаратуры (в состав аппаратуры должно входить специализированное вычислительное устройство) и отсутствие наглядной индикации заданного фарватера и пройденной части траектории.
Известен более простой способ определения места системы путем измерения и индикации дистанций до маяков. Этот способ реализуется в гидроакустических навигационных системах (патент Великобритании акц. заявка №1.318.480 Н. кл. G01s 9/68, патент Франции №2.118.896 Н. кл. G01s 1/00). Их недостатком является отсутствие наглядной индикации заданного фарватера и пройденного пути, а также отсутствие устройства, определяющего и индуцирующего величину отклонения от заданной траектории (соответственно, отсутствие операции определения этого отклонения).
Из известных способов определения траектории движения судна и гидроакустических систем такого назначения наиболее близкими по технической сущности являются способ и система, описанные в журнале "Navigation" за 1972 г., Sping, Vol.19, №1, стр.66. Система названа "Hydroway". Способ определения траектории судна содержит операцию излучения импульсных сигналов двумя донными гидроакустическими маяками, один из которых периодически излучает одиночный импульс, а второй - пару импульсов, один из которых опережает сигнал первого маяка, а второй - отстает на ту же величину, причем величины времени опережения и отставания постоянны для данной пары маяков. Излучение обоих маяков осуществляется на одной частоте. Принятые сигналы поступают на индикатор, на котором в результате многократного приема сигналов формируются две трассы: одна - в виде двух линий, отстоящих друг от друга на расстояние, соответствующее величине паузы между импульсами, и вторая - в виде одной линии. Расположение второй трассы внутри первой свидетельствует о том, что расстояния от судна до обоих маяков равны, и судно движется по перпендикуляру к базе маяков, пересекающему базу в ее средней точке.
В состав системы "Hydroway" входят донные гидроакустические маяки и бортовая аппаратура, включающая в себя последовательно соединенные приемо-усилительный тракт и индикатор-самописец.
Система и способ имеют недостаток: ширина фарватера не может быть оперативно изменена, в то время как ширина фарватера должна соответствовать размерам и маневренности судна, а также конкретным условиям плавания.
Целью настоящего изобретения является обеспечение возможности регулировки "ширины" фарватера, т.е. точности следования судна по заданной траектории в соответствии с оперативной обстановкой, причем эта регулировка должна осуществляться на борту судна, без каких либо операций регулировки маяков.
Поставленная цель достигается тем, что излучение маяков осуществляется на двух различных несущих частотах (каждый маяк излучает одиночный импульс на своей несущей частоте). В бортовой аппаратуре судна принятые сигналы задерживаются во времени, причем сигнал первой частоты задерживают на величину, соответствующую заданной точности определения траектории (допустимой величине уклонения от заданной траектории), и подают на индикатор до и после задержки во времени, а сигнал второй частоты подается на индикатор после задержки во времени, величина которой равна половине величины задержки сигнала первой частоты. Время задержки регулируется, в результате чего может быть установлена любая точность следования по заданной траектории (в пределах максимальной величины временной задержки).
Соответствующие дополнения вводятся в бортовую аппаратуру: приемный тракт выполняется двухканальным, в соответствии с рабочими частотами маяков, а между выходами приемных каналов и входом индикатора включаются регулируемые линии задержки, имеющие общую схему управления. Линии задержки выполняются многозвенными, причем регулировка величины задержки осуществляется с помощью переключателя (например, электронного с дистанционным управлением), а соотношение между величинами временных задержек обеспечивается тем, что задержка в каждом звене второй линии выполнена в два раза меньшей, чем задержка соответствующего звена первой линии.
На фиг.1 представлена блок-схема предлагаемой системы.
Гидроакустическая навигационная система (фиг.1) содержит донные гидроакустические маяки 1, 2 и бортовую аппаратуру. В состав бортовой аппаратуры входят приемо-усилительный тракт 3, содержащий два канала усиления 4 и 5, регулируемые линии задержки 6 и 7, включенные между каналами усиления и индикатором 8, причем первый канал 4 соединен с индикатором не только через регулируемую линию задержки 6, но и непосредственно с ним. Регулировка линий задержки осуществляется устройством 9.
Излучение импульсных сигналов маяков-ответчиков (имеющих одинаковую форму и длительность) осуществляется на двух различных несущих частотах (каждый маяк излучает на своей частоте). Моменты излучения синхронизируются с работой индикатора одним из известных способов, например путем использования единого блока управления и кабельной связи между маяками и береговой аппаратурой.
Сигнал первого маяка, поступающий в первый приемо-усилительный канал 4, подается на индикатор 8 дважды: непосредственно с выхода тракта и после прохождения регулируемой линии задержки 6. Сигнал второго маяка поступает на второй приемо-усилительный канал 5, далее на регулируемую линию задержки 7 и на индикатор 8. При многократном приеме сигналов маяков на экране индикатора формируются две трассы: одна - в виде двух линий, расстояние между которыми соответствует величине задержки времени в линии задержки 6, вторая - в виде одиночной линии. При движении корабля по перпендикуляру, опущенному в середину базовой линии маяков, вторая трасса располагается внутри первой.
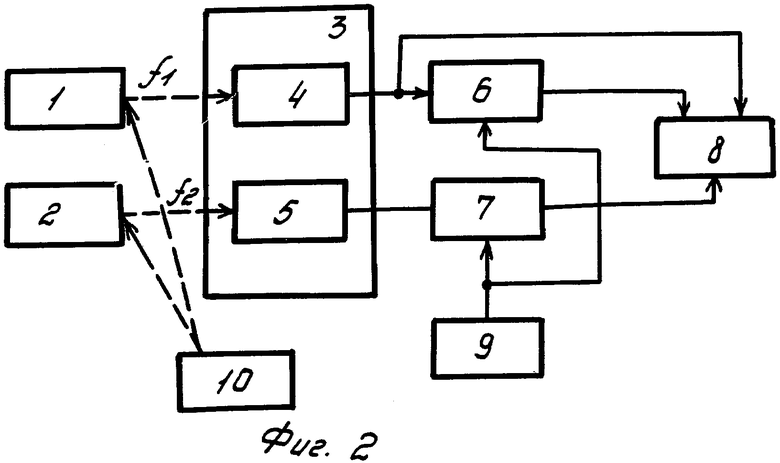
Использование предлагаемого способа и системы позволяет получить положительный эффект, выгодно отличающий их от прототипа тем, что на каждом отдельном судне, проходящем фарватер, величина допустимого отклонения может быть отрегулирована в соответствии с его маневренностью и текущей обстановкой. Если в качестве маяков системы использовать маяки-ответчики, а в состав бортовой аппаратуры ввести устройство излучения сигналов запроса маяков, то может быть достигнуто дополнительное преимущество: возрастет срок службы системы, так как энергоресурс маяков будет расходоваться рационально только тогда, когда по фарватеру проходит корабль, а маяки будут автономными. Кроме того, появится возможность использования для создания предлагаемой системы стандартных маяков дальномерных гидроакустических навигационных систем. Блок-схема системы, использующей маяки-ответчики, представлена на фиг.2. По сравнению с фиг.1 в состав бортовой аппаратуры введено устройство излучения сигналов запроса маяков 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА И САМОХОДНЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2710791C1 |
| СИСТЕМА ПРИВЕДЕНИЯ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА К ДОННОМУ ПРИЧАЛЬНОМУ УСТРОЙСТВУ | 2020 |
|
RU2750550C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2012 |
|
RU2517775C1 |
| АРКТИЧЕСКАЯ ПОДВОДНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ВОЖДЕНИЯ И НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ НАДВОДНЫХ И ПОДВОДНЫХ ОБЪЕКТОВ НАВИГАЦИИ В СТЕСНЕННЫХ УСЛОВИЯХ ПЛАВАНИЯ | 2015 |
|
RU2596244C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
| Способ навигационно-информационной поддержки глубоководного автономного необитаемого подводного аппарата | 2018 |
|
RU2689281C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
Изобретение относится к области гидроакустики, а именно к гидроакустическим навигационным системам с донными маяками. Устройство содержит два гидроакустических маяка, двухканальный приемо-усилительный тракт и многоканальный индикатор, подключенный к выходу одного из трактов. В каждый канал приемо-усилительного тракта введена многозвенная коммутируемая линия задержки, выход которой подключен к соответствующему входу индикатора. Время задержки каждого звена одной из линий задержки составляет половину времени задержек каждого звена другой линии задержки. Достигается повышение эффективности проводки судна в условиях изменяющегося фарватера. 2 ил.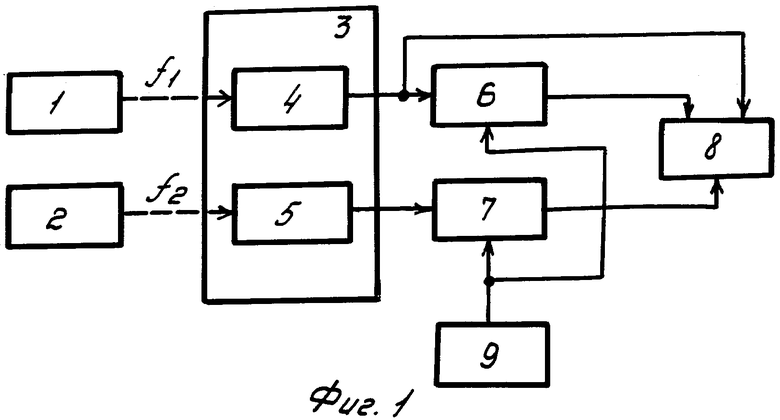
Гидроакустическое устройство для определения траектории движения судна по фарватеру, содержащее два гидроакустических маяка, двухканальный приемо-усилительный тракт и многоканальный индикатор, подключенный к выходу одного из трактов, отличающееся тем, что, с целью повышения эффективности проводки судна в условиях изменяющегося фарватера, в каждый канал приемо-усилительного тракта введена многозвенная коммутируемая линия задержки, выход которой подключен к соответствующему входу индикатора, причем время задержки каждого звена одной из линий задержки составляет половину времени задержек каждого звена другой линии задержки.
| Патент США №3222634 от 07.12.65 г., класс 340-3 | |||
| Патент США №3559161 от 26.01.71 г., класс 340-6 | |||
| Патент США №3267417 от 16.08.66 г., класс 340-3. |

