Известно электрогидравлическое устройство к многоковшовому экскаватору для автоматического регулирования глубины копания, включающее датчик глубины, взаимодействующий с копирным тросом и электрически связанный с электромагнитами гидрозолотникового распределителя, гидронасос с трубопроводами и исполнительные цилиндры.
Однако такие устройства требуют ручных доделочных работ.
Описываемое устройство позволяет повысить точность выдерживання заданной глубины и уклона дна транщеи, что исключает ручные доделочные работы. Оно выполнено с суммирующим гидроусилителем, состоящим из управляемого гидрозолотниковым распределителем гидропилиндра и соединенного со щтоком последнего подпружиненного гидрозолотника, связанного трубопроводом с исполнительными цилиндрами.
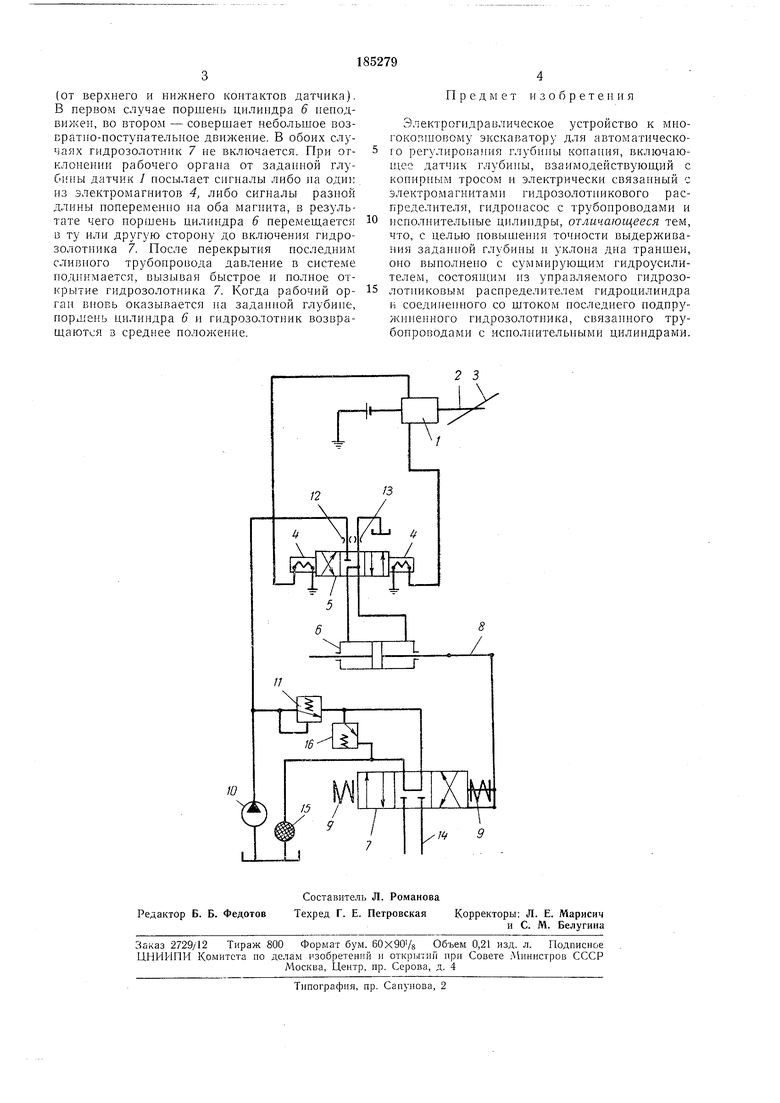
На чертеже схематически ноказано описываемое электрогидравлическое устройство.
Датчик J на рабочем органе экскаватора через щуп 2 взаимодействует с конирным тросом 3 и электрически связан с электромагнитами 4 гидрозолотникового распределителя 5. Последний через гидроцилиндр 6 управляет гидрозолотпиком 7, который соединен со штоком 8 гидроцилиндра 6 и удерживается в
среднем (нейтральном) положении пружинами 5. Система питается гидронасосом 10. Клапан // создает в системе подпиточное давление. Калиброванные отверстия 12 и 13 опре;1,еляют скорость перемещения порщня гидроцилиндра 6. Трубопроводы 14 связывают гидрозолотник 7 с нсполпительными цилиндрами. Фильтр 15 очищает масло, клапан 16 ограничивает давление в гидросистеме.
При нарушении взаимиого расположения датчика и конира на один из электромагнитов 4 гидрозолотникового распределителя 5 поступает сигнал. Насос 10 подает масло под давлением, созданным клапаном 11 через калиброванное отверстие 12 и гидрозолотпиковый распределитель 5 в гидроцилиндр 6, порщепь которого связан с гидрозолотником 7. Длительность электрических сигналов датчика невелика, и норщень цилиндра 6 перемещается на небольшое расстояние. Когда гидрозолотннковый распределитель 5 вернется в среднее положение, пружины 9 начнут перемещать поршень цилнндра 6 обратно со скоростью, определяемой калнброванны.мп отверстиями 12 и 13. Правильная глубина конания характеризуется отсутствием сигналов датчика, когда амнлитуда вибрации рабочего органа меньше нечувствительной зон1з1 датчнка, илн неременными сигналами одинаковой длнтельности
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СИЛОВЫМИ ЦИЛИНДРАМИ РАБОЧЕГО | 1967 |
|
SU190281A1 |
| Гидравлический привод рабочего оборудования одноковшового экскаватора | 1982 |
|
SU1134678A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛИННОБАЗНОГО АВТОПОЕЗДА | 2015 |
|
RU2604376C1 |
| Устройство управления приводом рабочего оборудования экскаватора | 1974 |
|
SU592936A1 |
| Электрогидросистема управления процессом копания землеройной машины цикличного действия | 1982 |
|
SU1112100A1 |
| Гидравлический рулевой привод шарнирно-сочлененного транспортного средства с передними управляемыми колесами | 1978 |
|
SU918157A1 |
| МОЛОТ МАА ДЛЯ РАЗРУШЕНИЯ НЕГАБАРИТОВ ГОРНЫХ ПОРОД | 2002 |
|
RU2237808C2 |
| Бульдозер | 1981 |
|
SU962481A1 |
| Транспортное средство | 1980 |
|
SU935325A1 |
| ГИДРОПРИВОД НАСОСНОЙ СКВАЖИННОЙ УСТАНОВКИ | 2022 |
|
RU2793863C1 |
