(54) КОЗЛОВОЙ КРАН
| название | год | авторы | номер документа |
|---|---|---|---|
| Козловой кран | 1980 |
|
SU887436A1 |
| Козловой кран | 1986 |
|
SU1402555A1 |
| Выравнивающее устройство дляСАМОМОНТиРующЕгОСя КОзлОВОгОКРАНА | 1979 |
|
SU796178A1 |
| Козловой кран | 1978 |
|
SU745852A1 |
| Опора козлового крана | 1976 |
|
SU549407A1 |
| Самомонтирующийся козловой кран | 1974 |
|
SU516619A1 |
| Козловой кран | 1988 |
|
SU1521701A1 |
| Козловой кран | 1989 |
|
SU1776627A1 |
| Козловой кран | 1987 |
|
SU1544701A1 |
| Козловой самомонтирующийся кран | 1974 |
|
SU516620A1 |
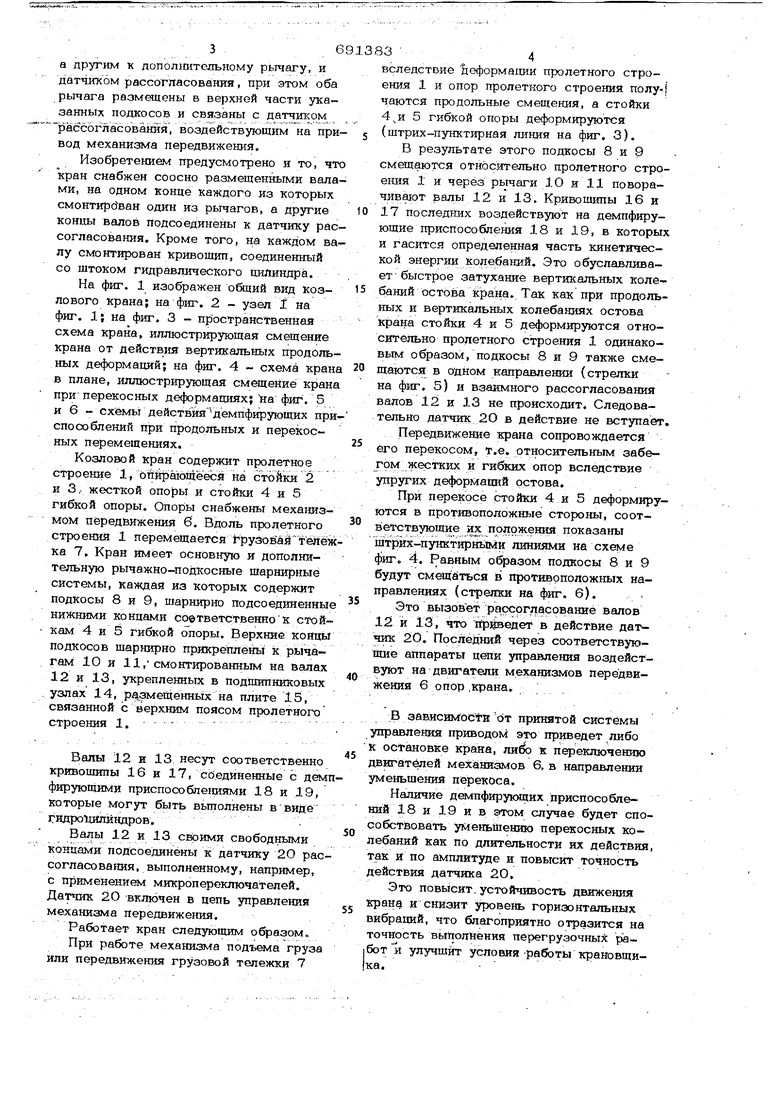
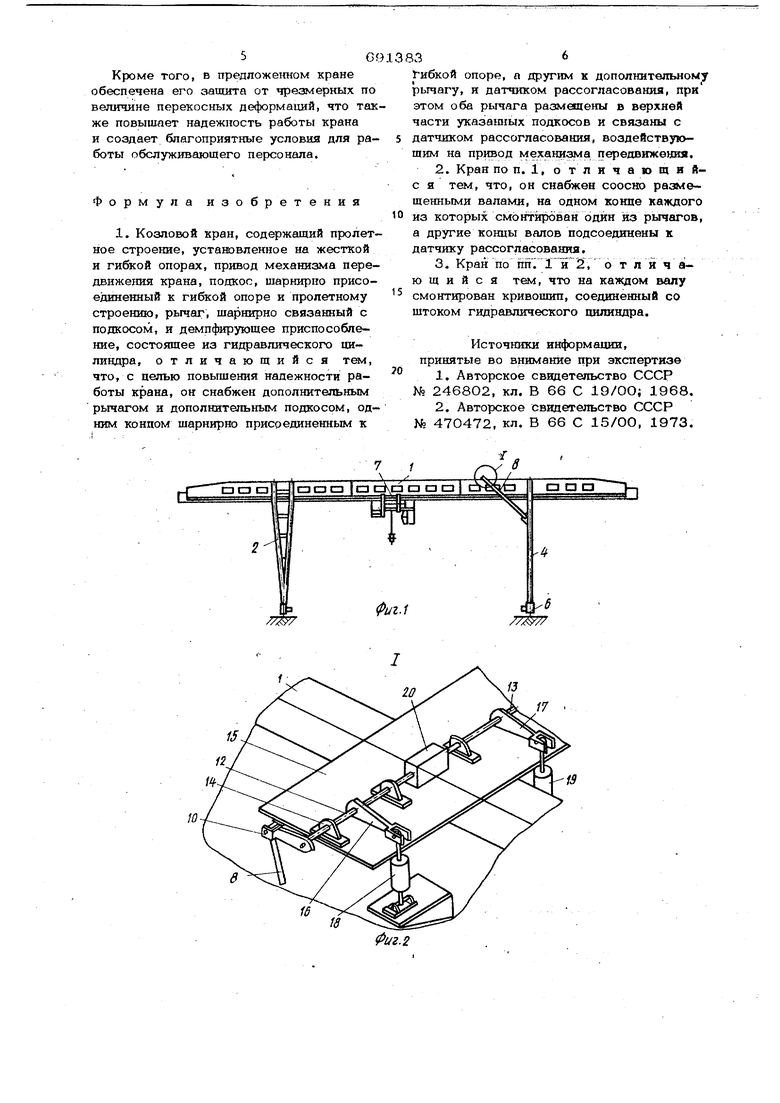
Т1эобретение относится к области подъемно-транспортного машиностро ения, а именно, к козловым кранам, имеющим приспособление для гашения колебаний, возникающих при работе крана. Известны козловые краны, содержащи пролетное строение, установленное на жесткой и гибкой опорах, привод механизма передвижения крана в приспособле ние для гашения колебаний, вьшолненное в виде шарнирно подвешенного; на пролет ном строении противовеса, c eдiffleннoгo с демпфирующим элементом l. Конструктивное вьтолнение этих кра нов обеспечивает гашение колебаний в узкой полосе частот, происходящих только в вертикальной плоскости. Этот недостаток в известной мере устранен в конструкции козлового крана, содержащей пролетное ст юение, укреплен roe на жесткой и гибкой опорах, привод механизма передвижения крана, подкос, и1арнирно присоединенный к гибкой опоре и пролетному строензапо, рычаг, шарнирной связанный с подкосом, и демпфирующее приспособление, состояли её из гидравлического гйшйМдра 2 . Недостатком известного крана является то, что от ;перёк6сных деформаций, значительней по величине и возникающих при движении 1срана, конструкция не защищена. Наличие перекосных деформаций относительно за(5егов опор приводит к толчкам и ударам при передвижении крана и может вШвать шлШку ёго « ёталЛйческой конструкшш. Это существенно снижает надежность крана и приводит к необходимости чрезмерногчэ увеличения размеров эл лёнтЬв несущих конструкций, а вместе с тем и повышение веса крана. ЦельюйЙ1сТо® б1Эобретения является повышегаё надежности работы крана/-, - :-- -,.,-,,. .,..,;.,,;.,. Эта цель достигается тем, что кран снабжен дополдатагйШм рычагок и дополнительш п ШЙШГГбШаг кпадбк шар- нирно присоединенным к гибкой опоре, 6 и а лругим к допол1П1тельному рычагу, датчиком рассогласования, при этом рычага размещены в верхней части указанных подкосов и связаны с датчиком рассогласования, воздействующим на при вод механизма передвижения. Изобретением предусмотрено и то, чт кран снабжен соосно размещенными вала ми, на одном конце каждого из которых смонт1гр ван один из рычагов, а другие концы валов подсоединены к датчику рас согласования. Кроме того, на каждом ва лу смонтирован кривошип, соединенный со щтоком гидравлического цилиндра,. На фиг. 1 изображен ойций вид козлового крана; на фиг. 2 - узел I на фиг. 1; на фиг, 3 - пространственная схема крана, иллюстрирующая смещение крана от действия вертикальных продоль ных деформаций; на фиг. 4 - схема кран в плане, иллюстрирующая смещение кран при перекосных деформациях; на фиг, 5 и б - схемы действия демпфирующих при способлений при продольных и перекосных перемещениях. Козловой кран содержит пролетное строение 1, опйршощёеся на стойки 2 и 3, жесткой опоры и стойки 4 и 5 гибкой опоры. Опоры снабжены Mexaimaмом передвижения б. Вдоль пролетного строений 1 перемещается рузовййтелён ка 7, Кран имеет основную и дополнительную рычажно-подкосные шарнирные системы, каждая из которых содержит подкосы 8 и 9, шарнирно подсоединенны нижними юнцами соответственнок стойкам 4 и 5 гибкой опоры. Верхние койцы подкосов шарнирно прикреплены к рычагам 10 и 11,смонтированным на валах 12 и 13, укрепленных в подшипниковых .узлах 14, р4.зме ценных на плите 15, связанной с верхним поясом пролетного строения 1, - .- - Валы 12 и 13 несут соответственно кривошипы 16 и 17, соединенные с дем фирующими приспособлевдями 18 и 19, которые могут быть вьшолнены в виде гидрогсилиндров.. Валы 12 и 13 сйэими свободными концами подсоединены к датчику 2О рас согласова1шя, выполненному, например, с применением микропереключателей. Датчик 20 включен в цепь управления механизма передвижения. Работает кран следующим образом,. При работе механизма подъема груза или передвижения грузовой тележки 7 3 4 вследствие деформации пролетного строения 1 и опор пролетного строения полу- чаются продольные смещения, а стойки 5 гибкой опоры деформируются (штрих-пунктирная линия на фиг. 3). В результате этого подкосы 8 и 9 смещаются относительно пролетного строения 1 и через рычаги 10 к Ц поворачивают валы 12 и 13. Кривошипы 16 и 17 последних воздействуют на демпфирующие приспособления 18 и 19, в которых и гасится определенная часть кинетической энергии колебаний. Это обуславливает быстрое затухание вертикальных колебаний остбёа крана. Так как при продольных и вертикальных колебаниях остова крана стойки 4 и 5 деформируются относительно пролетного строения 1 одинаковым образом, подкосы 8 и 9 также смещаются в одном направлении (стрелки на фиг, 5) и взаимного рассогласования валов 12 и 13 не происходит. Следовательно датчик 2О в действие не вступает. Передвижение :крана сопровождается его перекосом, т.е. относительным забегом жестких и гибких опор вследствие упругих деформаций остова. При перекосе стойки 4 и 5 деформируются в противоположные стороны, соответствующие их положений показаны штрих-пунктирными линиями на схеме фиГе 4. Равным образом подкосы 8 и 9 будут смещёться в противоположных направлениях (стрелки на фиг. 6). Это вызовет рассрг;1;асование валов 12 и 13, что пЕрйведет в действие датчик 20. Послейний через соответствующие аппараты цепи управления воздействуют на двигатели механизмов передвижения 6 опор .крана, В зависимГоСтй принятой системы управления приводом это пр1юедет либо к остановке крана, либо к переключению двигателей механизмов 6, в направлении уменьшения перекоса. Наличие демпфщзующих приспособлений 18 и 19 и в этом случае будет способствовать уменьшению перекосных колебаний как по длительности их действия, так и по амплитуде и повысит точность действия датчика 2О, Это повысит. ус1Х)йчивость движения крана и снизит уровень горизонтальных вибраций, что благоприятно отразится на точность выполнения перегрузочных работ и улучшит условия работы крановщика. 5G Кроме того, в предложе1«гом кране обеспечена его защита от чрезмерных по величине перекосных деформаций, что так же повышает надежность работы крана и создает благоприятные условия для работы обслуживающего персонала. Формула изобретения 1. Козловой кран, содержащий пролетное строение, установленное на жесткой и гибкой опорах, привод механизма передвижения крана, подкос, шарнирно присоединенный к гибкой опоре и пролетному строению, рычаг, шарнирно связанный с подкосом, и демпфирующее приспособление, состоящее из гидравлического цилиндра, отличающийся тем, что, с целью повышения надежности работы крана, он снабжен дополнительным рычагом и дополнительным подкосом, одним концом шарнирно присоединенным к 36 Гибкой опоре, а другим к дополнительному рычагу, и датчиком рассогласования, при этом оба рычага размещены в верхней части указаш1ых подкосов и связаны с датчиком рассогласования, воздействующим на привод механика передвижения. 2.Кран по п. 1, отличающийся тем, что, он снабжен соосно размещенными валами, на одном конце каждого из которых смонтирован один из рычагов, а другие концы валов подсоединены к датчику рассогласования, 3.Кран по ппГГ и 2, о т л и ч aiю щ и и с я тем, что на каждом валу смонтирован кривошип, соединенный со штоком гидравлического цилиндра. Источники информашш, принятые во внимание цри экспертизе 1, Авторское сввдетеяьство СССР № 2468О2, кл. В 66 С 19/ОО; 1968. 2. Авторское свидетельство СССР Mb 470472, кл. В 66 С 15/00, 1973.
в
W
W
