Известные приводы валковой подачи к эксцентриковым и кривошипным прессам содержат смонтированный на приводном валу пресса кривошип, в котором закреплены винт и гайка. Последняя установлена на винте эксцентрично относительно оси враш.енкя кривошипа и жестко связана с тягой, сообщаюш,ей движение подаюш,им валкам.
В известных приводах гайка закреплена на винге неподвижно, вследствие чего величина эксцентриситета ее относительно оси враш,ения кривошипа, а также определяемый этим шаг подачи являются постоянными.
Предлагаемый привод позволяет изменять шаг подачи за один или несколько ходов пресса, причем изл енение шага подачи осуш,ествляется по закону арифметической прогрессии.
От известных привод отличается тем, что он снабжен механизмом возрастания или убывания шага подачи, сообш,аюшим гайке переме-ш,ение вдоль винта на требуемый шаг. Этот механизм выполнен в виде двух нальцев, установленных по обе стороны винта и связанных посредством системы управления с механизмом отсчета ходов пресса.
крепленной на винте, когда она после одного или заданного числа оборотов вала пресса занимает верхнее положение. Палец поворачивает звездочку и винт, при этом гайка перемеш;ается вдоль винта, изменяется величина эксцентриситета кривошипа, с которым связана тяга, в результате изменяется (увеличивается или уменьшается) шаг подачи заготовки. На чертеже изображена схема привода.
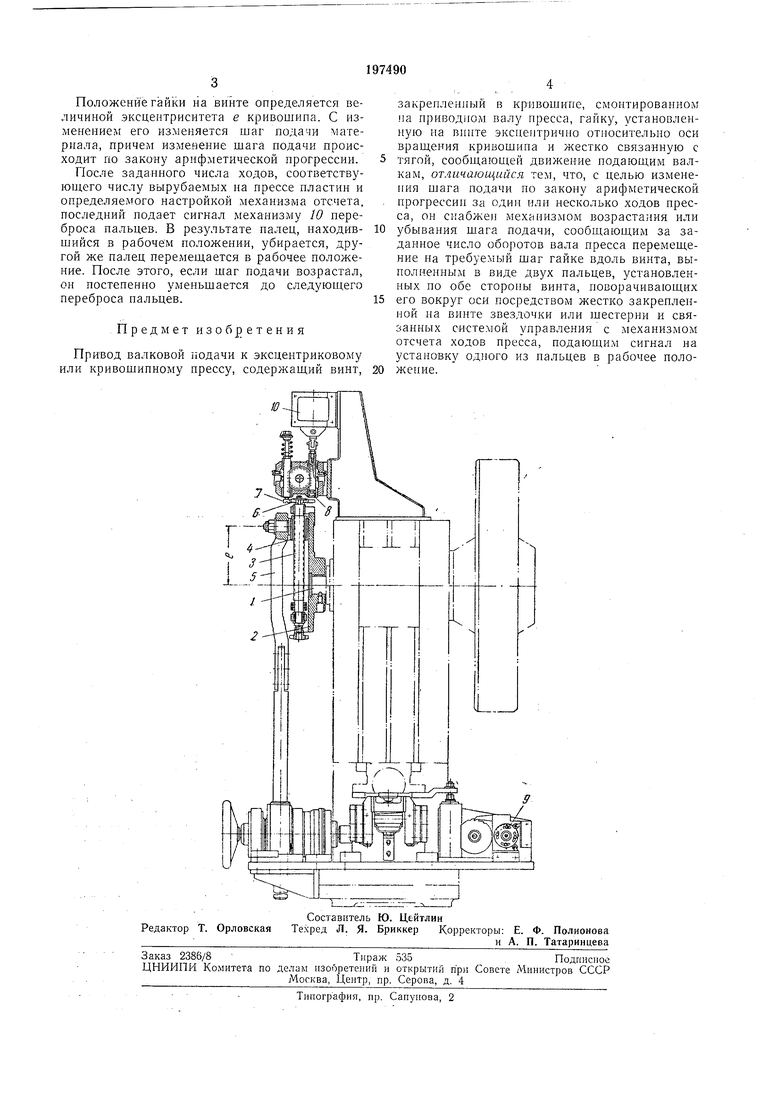
На конце приводного вала / закреплен кривошип 2, в котором установлен винт 3. На винте помещена гайка 4, жестко связанная с тягой 5, передающей движение подающим валкам. На одном из концов винта жестко закреплена звездочка (или шестерня) 6. Над винтом по обе стороны расноложены пальцы 7 и 8, связанные с механизмом 9 отсчета ходов пресса. Один из пальцев находится в рабочем положении.
При повороте вала пресса на один оборот звездочка занимает верхнее положение и при этом входит в зацепление с пальцем. Последний поворачивает звездочку, а вместе с ней и винт вокруг его оси на заданную часть оборота. Гайка перемещается вдоль винта на соответствующий шаг, причем, если в рабочел; положении находится, например, палец 7, винт поворачивается по часовой стрелке, гайка поднимается и шаг увеличивается, если палец
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНЫЙ МЕХАНИЗМ ПЕРЕМЕННОГО РАДИУСА | 2003 |
|
RU2238455C1 |
| Пульсирующий конвейер с регулируемым шагом | 1984 |
|
SU1284906A1 |
| Устройство для подачи длинномерного материала в рабочую зону обрабатывающей машины | 1989 |
|
SU1634354A1 |
| Устройство для подачи материала к прессу | 1987 |
|
SU1489902A1 |
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
| Устройство для подачи длинномерного материала в рабочую зону пресса | 1978 |
|
SU856629A1 |
| Листоштамповочный многопозиционный пресс-автомат | 1974 |
|
SU548439A1 |
| Грейферное устройство для подачи заготовок в рабочую зону пресса | 1971 |
|
SU401092A1 |
| УСТРОЙСТВО ДЛЯ ШАХМАТНОГО РАСКРОЯ ЛИСТОВОГОМАТЕРИАЛА | 1968 |
|
SU221646A1 |
| Устройство для привода в движение подающих штанг многопозиционного пресса | 1989 |
|
SU1739838A3 |
