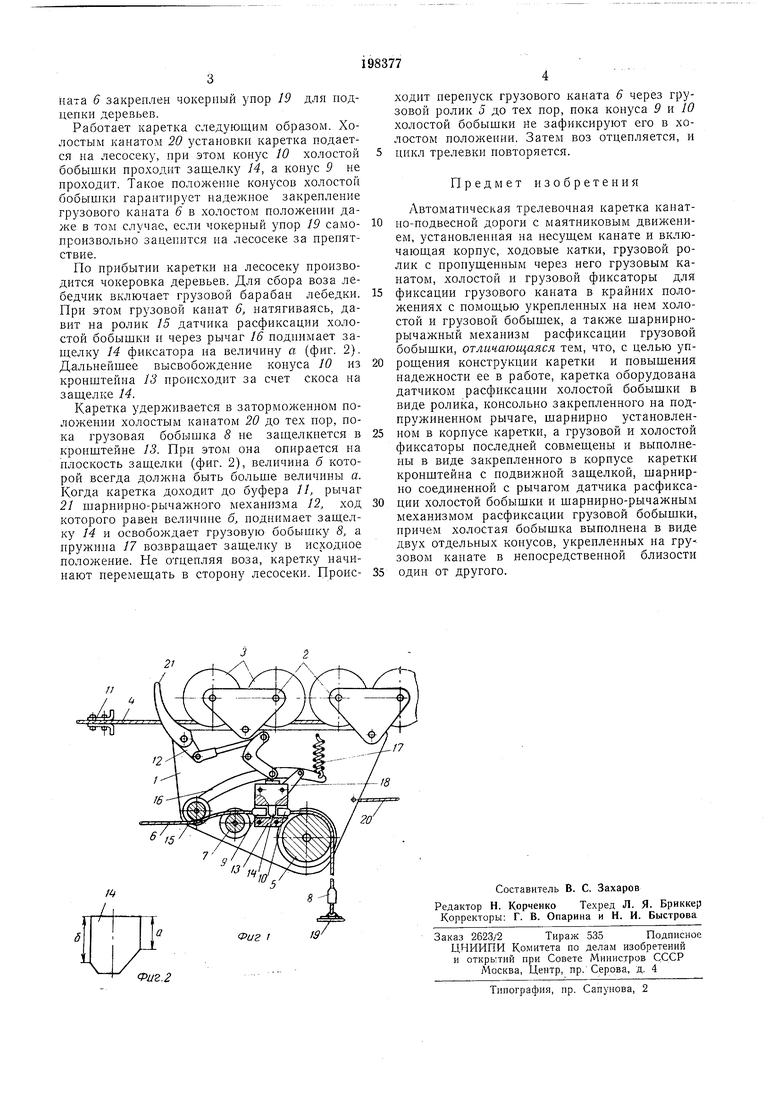
Извеетиы автоматичеекие треотевочные каретки канатно-подвесиых дорог с маятниковым двнжеиием, установленные иа несущем каиате и включающие корпус, ходовые катки, грузовой ролпк с ироиущеиным через иего грузовым канатом, холоетой и грузовой фиксаторы для фиксации грузового каиата в крайних положениях с помощью укрепленных на нем холоетой и грузовой бобыщек, а также шариирно-рычажиый мехаииз1 1 расфиксации грузовой бобыгнки. Основпыми недостатками таких кареток являются повыпиеиная сложиоеть их конструкции и низкая надежность в работе. Предлагаемая каретка лищена указанных недостатков и отличается от известных тем, что она оборудована датчиком расфиксации холостой бобыщки в виде ролика, консольно закрепленного на подпружиненном рычаге, щарнирно установленном в корпуее каретки. Грузовой и холоетой фиксаторы последней совмещены и выполнены в виде закрепленного в корпусе каретки крон1нтеЙ11а с подвижной защелкой, щарнирно соединеиион с рычагом датчика расфиксации холостой бобыи1кн и и щарнирио-рычажным механизмом расфиксации грузовой бобышки. При этом холостая бобыщка выполиепа в виде двАх отдельных конусов, укреплеииых на грузовом каиате в непосредствеииой близости один от другого. Па фиг. I изображена описываемая автоматическая трелевочпая каретка; на фиг. 2- защелка фиксатора. Каретка содержит корнус /, подвески 2, ходовые катки 3, при помощи которых каретка опнраетея на несущий канат 4, грузовой ролик 5 с пропущенным через него грузовым канатом 6, поддерживающий ролик 7. Па грузово М каиате 6 закреплены грузовая бобыщка 8 и холостая бобыщка, выполненная в виде двух отдельных конусов 5 ц 10. Па несущем канате 4 находитея буфер 11, & ъ корпусе / каретки размещен щарнирно-рычажный механизм У.2 расфикеации грузовой бобышки, взаимодейетвующий с буфером //. Холостой и грузовой фиксаторы каретки совмещены и выполнены в виде закрепленного в корпусе / кронщтейпа 13 е подвижной защелкой 14. Каретка оборздована также датчиком расфпксации холостой бобыщкн, выполненным в виде ролпка 15, коисольно закрепленного иа поворотном рычаге 16, свободный конец которого соединен с пружиной 17, прикрепленной ккорнусу / каретки. Рычаг 16 шарнирно соединен с опорным рычаго 1 18, скреплеипым с кронщтейном 13 фиксатора. Защелка 14 фиксатора щариирио связана с рычагом 16 датчика расфиксации холостой бобыщки и с щарнирио-рычажиым механизмом 12 расфиксацин грузовой бобыщки 8. Па коице грузового каiiara 6 закреплен чокериый упор 19 для подцепки деревьев.
Работает каретка следующим образом. Холостым канатом 20 установкп каретка подается на лесосеку, при этом конус 10 холостой бобышки проходит защелку 14, а коиус 9 не проходит. Такое положение конусов холостой бобышки гараитирует надежное закрепление грузового каната 6 в холостом положении даже в том случае, если чокерный упор 19 самопроизвольно заценнтся на лесосеке за препятствие.
По прибытии каретки на лесосеку производится чокеровка деревьев. Для сбора воза лебедчик включает грузовой барабан лебедки. При этом грузовой канат 6, натягиваясь, давит на ролик 15 датчика расфиксации холостой бобышки и через рычаг 16 поднимает защелку 14 фпксатора на величину а (фиг. 2). Дальнейшее высвобождение конуса 10 из кронштейна 13 происходит за счет скоса на защелке 14.
Каретка удерживается в заторможенном положении холостым канатом 20 до тех пор, пока грузовая бобышка 8 не защелкпется в кронштейне 13. Прп этом она опнрается на плоскость защелки (фиг. 2), величина б которой всегда должна быть больше величины а. Когда каретка доходит до буфера 11, рычаг 21 шарнирно-рычажного механизма 12, ход которого равен величиие б, поднимает защелку 14 и освобождает грузовую бобышку 8, а пружина 17 возвращает защелку в исходное положение. Не отцепляя воза, каретку начинают перемещать в сторону лесосеки. Происходит перепуск грузового каната 6 через грузовой ролик 5 до тех пор, пока конуса 9 к 10 холостой бобышки Не зафиксируют его в холостом положении. Затем воз отцепляется, и цикл трелевки повторяется.
Предмет изобретения
/ втоматическая трелевочная каретка канатно-подвесной дороги с маятниковым движением, установленная на несущем канате и включающая корпус, ходовые катки, грузовой ролик с пропущенным через него грузовым канатом, холостой и грузовой фиксаторы для
5 фиксации грузового каната в крайних положениях с помощью укрепленных на нем холостой и грузовой бобышек, а также шарнирнорычажный механизм расфиксации грузовой бобышки, отличающаяся тем, что, с целью упрощения конструкции каретки и повышения надежности ее в работе, каретка оборудована датчиком расфиксации холостой бобышки в виде ролика, коисольно закрепленного на подпружиненном рычаге, шарнирно установленном в корпусе каретки, а грузовой и холостой фиксаторы последней совмещены и выполнеиы в виде закрепленного в корпусе каретки кронштейна с подвижной защелкой, щарнирно соединенной с рычагом датчика расфикса0 ции холостой бобышки и шарпирно-рычажным механизмом расфиксации грузовой бобышки, причем холостая бобышка выполнена в виде двух отдельных конусов, укрепленных на грузовом канате в непосредственной близости
один от другого.
| название | год | авторы | номер документа |
|---|---|---|---|
| АТГНМ.ГО- .ТЕХН!" :i;;i;.^ 1БИБ-П-ТКА | 1966 |
|
SU189459A1 |
| АВТОМАТИЧЕСКАЯ ТРЕЛЕВОЧНАЯ КАРЕТКА | 1967 |
|
SU198379A1 |
| АВТОМАТИЧЕСКАЯ ТРЕЛЕВОЧНАЯ КАРЕТКА ^';"Ч';к- ...:i;At; c.:;-^..niOTLiiA | 1964 |
|
SU159565A1 |
| Трелевочная каретка канатной дороги | 1985 |
|
SU1257007A2 |
| МНОГОПРОЛЕТНАЯ ТРЕЛЕВОЧНАЯ УСТАНОВКА | 1972 |
|
SU419434A1 |
| Трелевочная каретка канатной дороги | 1983 |
|
SU1115950A1 |
| АВТОМАТИЧЕСКАЯ ТРЕЛЕВОЧНАЯ КАРЕТКА | 1964 |
|
SU165190A1 |
| Трелевочная каретка подвесной канатной дороги | 1986 |
|
SU1355527A1 |
| АВТОМАТИЧЕСКАЯ ТРЕЛЕВОЧНАЯ КАРЕТКА | 1967 |
|
SU202987A1 |
| ОДНОПРОЛЕТНАЯ ПОДВЕСНАЯ КАНАТНАЯ ДОРОГ* | 1973 |
|
SU377291A1 |
