Известны грейферные механизмы для захвата и транспортирования деталей, содержащие перемещающийся по направляющей корпус, силовой цилиндр и грейферные линейки с захватами.
Особенность описываемого грейферного механизма заключается в том, что грейферные линейкп с захватами подвижно закреплены по обе стороны оси штока силового цилиндра на рейках реечного механизма, щестерни котороп.о, жестко закрепленные на корпусе, взаимодействуют с рейкой, удлиненной части штока силового цилиндра. Корпус перемещается линейно с фиксацией в обоих направлениях с помощью подпружиненных защелок, укрепленных на корпусе и взаимодействующих с соответствующими пазами на направляющей и упорами на грейферных линейках.
Такая конструкция грейферного механизма проще и, кроме того, обеспечивает захват и линейное транснортирование деталей с помощью одного силового цилиндра.
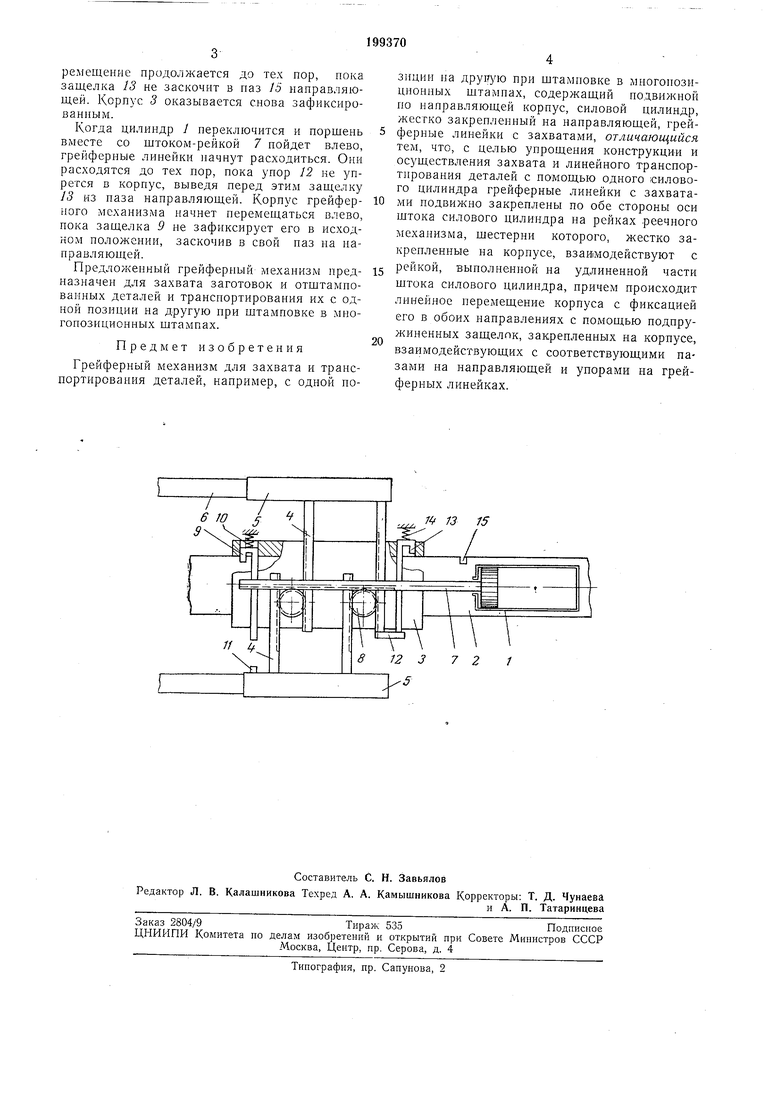
На чертеже схематически изображен предложенный грейферный механизм.
Силовой цилиндр 1 смонтирован на направляющей 2, по которой перемещается корпус 3 грейферного механизма. На рейках 4, выходящих влево и вправо от оси перемещения корпуса грейферного механизма, установлены
кронштейны 5, к которым прикреплены грейферные линейки 6 с захватами (на чертеже не показаны).
При срабатывании силового цилиндра и перемещении порщня вправо (по чертежу) штокрейка 7 приводит во вращение по часовой стрелке шестерни 8, которые, в свою очередь, приводят в движеиие находящиеся в зацеплении с ними рейки 4. При этом кронштейны 5, закрепленные на рейках, вместе с лииейками 6 сдвигаются для захвата деталей. Корпус грейферного механизма в это время неподвижен, так как он зафиксирован защелкой 9, которая находится в пазу направляющей и удерживается в нем пружиной 10. Грейферные линейки сближаются до тех пор, пока кронштейны 5 не упрутся в корпус. В конце их хода упор // выводит защелку 9 из паза направляющей, сжимая пружину 10.
В начале перемещения линеек 6 упор 12, закрепленный на одной из реек 4, освобождает защелку 13, и она 14 прижимается к боковой поверхности нанравляющей. Как только кронштейны 5 дойдут до упора, вращение шестерен 8 прекратится, но штокрейка 7 продолжает двигаться вправо, и корпус грейферпого механизма также начинает двигаться вправо, так как рейка тянет его за зубья шестерен. При таком перемещении детали переносятся на следующие позиции. Перемещение продолжается до тех пор, пока защелка 13 не заскочит в паз 15 направляющей. Корпус 3 оказывается снова зафиксированным.
Когда цилиндр 1 переключится и порщень вместе со щтоком-рейкой 7 пойдет влево, грейферные лппейки начнут расходиться. Они расходятся до тех пор, пока упор 12 не упрется в корпус, выведя перед этим защелку 13 из паза направляющей. Корпус грейферного механизма начнет перемещаться влево, пока защелка 9 не зафиксирует его в исходном положении, заскочив в свой паз на направляющей.
Предложенный грейферный механизм предназначен для захвата заготовок и отщтамнованных деталей и транспортироваиия их с одной позиции на другую при щтамповке в многопозиционных штампах.
Предмет изобретения
Грейферный механизм для захвата и транспортирования деталей, например, с одной позиции на друрую при щтамповке в миогопозиционных щтампах, содержащий подвижной по направляющей корпус, силовой цилиндр, жестко закрепленный на направляющей, грейферные линейки с захватами, отличающийся тем, что, с целью упрощения конструкции и осуществления захвата и линейного транспортирования деталей с помощью одного силового цилиндра грейферные линейки с захватами подвижно закреплены по обе стороны оси щтока силового цилиндра на рейках реечного механизма, щестерни которого, жестко закрепленные на корпусе, взаимодействуют с
рейкой, выполненной на удлиненной части щтока силового цилиндра, причем происходит линейное перемещение корпуса с фиксацией его в обоих направлениях с помощью подпружиненных защелок, закрепленных на корцусе, взаимодействующих с соответствующими пазами па направляющей и упорами ца грейферных линейках.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грейферное подающее устройство к прессу | 1987 |
|
SU1433594A1 |
| Автоматическая линия для многопозиционной листовой штамповки | 1986 |
|
SU1470398A1 |
| Устройство для захвата изделий | 1980 |
|
SU944945A1 |
| Грейферное подающее устройство | 1972 |
|
SU471933A1 |
| Установка для подачи листов к гильотинным ножницам | 1981 |
|
SU1016093A1 |
| Грейферный подающий механизм к многопозиционному прессу | 1985 |
|
SU1279722A1 |
| Шаговый конвейер | 1987 |
|
SU1475098A1 |
| Грейферное устройство для перемещения штучных заготовок между рабочими позициями многопозиционного штампа | 1990 |
|
SU1731373A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| Многопозиционный пресс для штамповки деталей | 1988 |
|
SU1542670A1 |
