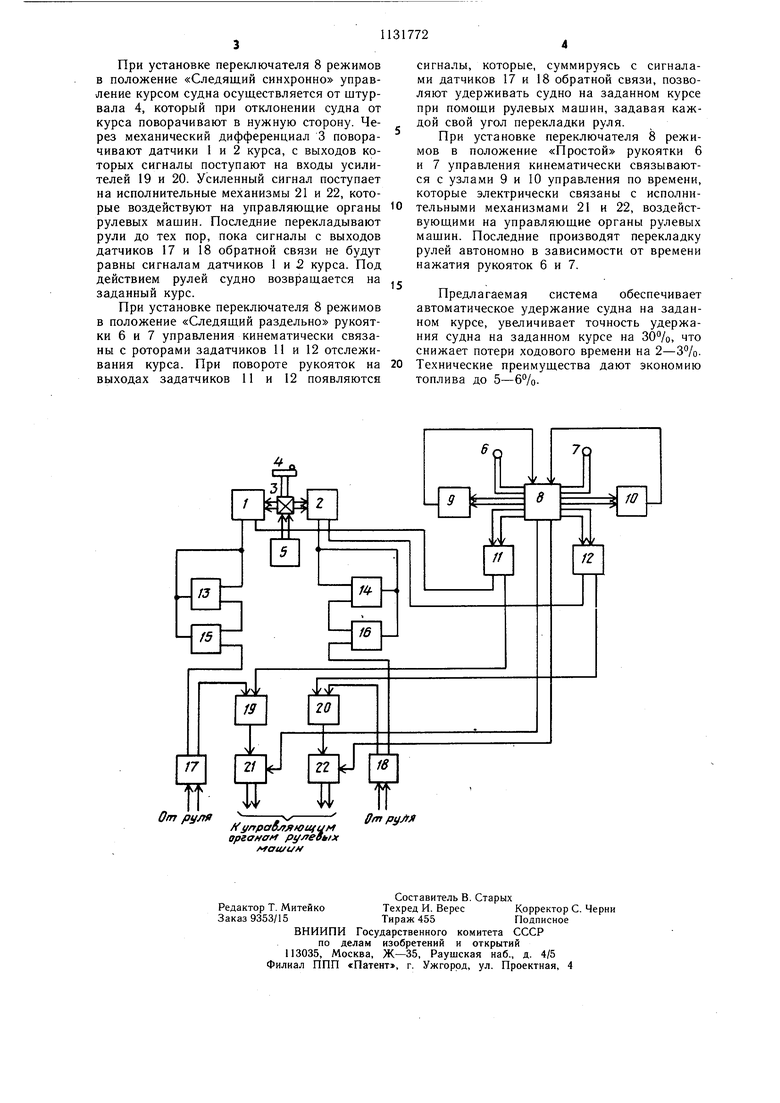
Изобретение относится к эксплуатации флота, в частности к системам управления курсом судна. Известна система управления курсом судна, содержащая сельсин-приемник гирокомпаса, связанный со штурвалом и датчиком курса, электрически соединенным через дифференцирующую и интегрирующую цепочки, датчик обратной связи и усилитель мощности с исполнительным механизмом для управляющего органа рулевой мащины 1. Недостатком известной системы являются низкие эксплуатационные параметры вследствие малой точности удержания судна на заданном курсе и малой надежности в эксплуатации. Цель изобретения - улучшение эксплуатационных параметров системы путем повышения точности удержания судна на заданном курсе и повышения надежности в эксплуатации. Поставленная цель достигается тем, что система управления курсом судна, содержащая сельсин-приемник гирокомпаса, связанный со штурвалом и датчиком курса, электрически соединенным через дифференцирующую и интегрирующую цепочки, датчик обратной связи и усилитель мощности с исполнительным механизмом для управляющего органа рулевой мащины, снабжена дополнительным датчиком курса, дополнительными дифференцирующей и интегрирующей цепочками, дополнительным датчиком обратной связи, дополнительным усилителем мощности, дополнительным исполнительным механизмом для управляющего органа дополнительной рулевой машины, переключателем режимов управления с рукоятками, узлами управления по времени и задатчиками отслеживания курса с роторами при этом основной и дополнительный датчики курса посредством механического дифференциала связаны кинематически со щтурвалом и сельсин-приемником гирокомпаса, выходы основного и дополнительного датчиков курса последовательно соединены соответственно через основные и дополнительные дифференцирующие и интегрирующие цепочки, основной и дополнительный датчики обратной связи, основной и дополнительный усилители основным и дополнительным исполнительными механизмами для управляющих органов основной и дополнительной рулевых машин, а упомянутые рукоятки кинематически связаны через переключатель режимов управления с узлами управления по времени и роторами задатчиков отслеживания курса, обмотки которых последовательно соединены соответственно с обмотками основного и дополнительного датчиков курса, выходами основных и дополнительных дифференцирующих и . интегрирующих цепочек, обмотками основного и дополнительного датчиков обратной связи и входами основного и дополнительного усилителей мощности, причем основной и дополнительный исполнительные механизмы соединены электрическими цепями с узлами управления по времени через переключатель режимов. На чертеже представлена функциональная схема системы. Система управления курсом судна содержит основной и дополнительный датчики курса 1 и 2, связанные кинематически через механический дифференциал 3 со штурвалом 4 и сельсином-приемником 5 гирокомпаса. Система снабжена рукоятками управления 6 и 7 для переключателя 8 режимов. Рукоятки управления 6 и 7 кинематически связанные через переключатель режимов 8 с узлами 9 и 10 управления по времени и роторами задатчиков 11 и 12 отслеживания курса, конструктивно представляют собой группы стандартных микровыключателей, обмотки которых последовательно соединены с обмотками основного и дополнительно датчиков курса 1 и 2, выходами основных и дополнительных дифференцирующих 13 и 14 и интегрирующих 15 и 16 цепочек, обмотками основного и дополнительного датчиков 17 и 18 обратной связи, входами основного и дополнительного усилителей 19 и 20 мощности, выходы которых соединены с основным и дополнительным исполнительными механизмами 21 и 22, которые электрически связаны с узлами 9 и 10 управления по времени через переключатель 8 режимов. Исполнительные механизмы 21 и 22 кинематически связаны с управляющими органами рулевых машин. Система управления курсом судна работает следующим образом. При отклонении судна от заданного курса от гирокомпаса в систему управления поступает сигнал на сельсин-приемник 5 гирокомпаса, который через дифференциал 3 синхронно разворачивает датчики 1 и 2 курса, электрически связанные с дифференцирующими 13 и 14 и интегрирующими 15 и 16 цепочками. На выходах датчиков 1 и 2 курса дифференцирующих 13 и 14 и интегрирующих 15 и 16 цепочек появляются сигналы, пропорциональные углу, производной и интегралу от угла отклонения судна от курса. Эти сигналы поступают на входы усилителей 19 и 20 мощности. Усиленные сигналы поступают на входы исполнительных механизмов 21 и 22, которые воздействуют на управляющие органы рулевых машин. Рулевые машины перекладывают рули до тех пор, пока сигналы с датчиков 17 и 18 обратной связи не будут равны суммарным сигналам, пропорциональным углу, производной и интегралу от угла отклонения судна от курса. Под действием рулей судно возвращается на заданный курс.
При установке переключателя 8 режимов в положение «Следящий синхронно управление курсом судна осуществляется от штурвала 4, который при отклонении судна от курса поворачивают в нужную сторону. Через механический дифференциал 3 поворачивают датчики 1 и 2 курса, с выходов которых сигналы поступают на входы усилителей 19 и 20. Усиленный сигнал поступает на исполнительные механизмы 21 и 22, которые воздействуют на управляющие органы рулевых машин. Последние перекладывают рули до тех пор, пока сигналы с выходов датчиков 17 и 18 обратной связи не будут равны сигналам датчиков 1 и 2 курса. Под действием рулей судно возвращается на заданный курс.
При установке переключателя 8 режимов в положение «Следящий раздельно рукоятки 6 и 7 управления кинематически связаны с роторами задатчиков 11 и 12 отслеживания курса. При повороте рукояток на выходах задатчиков 11 и 12 появляются
сигналы, которые, суммируясь с сигналами датчиков 17 и 18 обратной связи, позволяют удерживать судно на заданном курсе при помощи рулевых машин, задавая каждой свой угол перекладки руля.
При установке переключателя 8 режимов в положение «Простой рукоятки 6 и 7 управления кинематически связываются с узлами 9 и 10 управления по времени, которые электрически связаны с исполнительными механизмами 21 и 22, воздействующими на управляющие органы рулевых мащин. Последние производят перекладку рулей автономно в зависимости от времени нажатия рукояток 6 и 7.
Предлагаемая система обеспечивает автоматическое удержание судна на заданном курсе, увеличивает точность удержания судна на заданном курсе на 30%, что снижает потери ходового времени на 2-3%. Технические преимущества дают экономию топлива до 5-6%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для регулировки и испытаний системы управления курсом судна | 1982 |
|
SU1063710A1 |
| Авторулевой | 1988 |
|
SU1579851A1 |
| Устройство автоматического управления курсом судна | 1984 |
|
SU1237555A1 |
| Авторулевой | 1988 |
|
SU1533950A1 |
| Система стабилизации судна по курсу и бортовой качке | 1982 |
|
SU1030260A1 |
| Авторулевой | 1988 |
|
SU1527092A1 |
| Авторулевой | 1988 |
|
SU1625780A1 |
| СИСТЕМА УПРАВЛЕНИЯ СИЛОВЫМ ГИДРАВЛИЧЕСКИМ ПРИВОДОЛ1 СУДОВОГОРУЛЯ | 1967 |
|
SU206335A1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| Система управления судном | 1977 |
|
SU644666A1 |
СИСТЕМА УПРАВЛЕНИЯ КУРСОМ СУДНА, содержащая сельсин-приемник гирокомпаса, связанный со штурвалом и датчиком курса, электрически соединенным через дифференцирующую и интегрирующую цепочки, датчик обратной связи и усилитель мощности с исполнительным механизмом для управляющего органа рулевой машины, отличающаяся тем, что, с целью улучшения эксплуатационных параметров пут«м повышения точности удержания судна на заданном курсе и повышения надежности в эксплуатации, .она снабжена дополнительным датчиком курса, дополнительными дифференцирующей и интегрирующей цепочками, дополнительным датчиком обратной связи, дополнительным усилителем мощности, дополнительным исполнительным, механизмом для управляющего органа дополнительной рулевой машины, переключателем режимов управления с рукоятками, узлами управления по времени и задатчиками отслеживания курса с роторами, при этом основной и дополнительный датчики кур.са посредством механического дифференциала связаны кинематически со штурвалом и сельсин-приемником гирокомпаса, выходы основного и дополнительного датчиков курса последовательно соединены соответственно через основные и дополнительные дифференцирующие и интегрирующие цепочки, основной и дополнительный датчики обратной связи, основной и дополнительный усилители с основным и дополнительным исполнительными механизмами для управляющих органов основной и дополнительной рулевых мащин, а упомянутые рукоятки кинематически свяI заны через переключатель режимов управления с узлами управления по времени и роторами задатчиков отслеживания курса, обмотки которых последовательно соединены соответственно с обмотками основного и дополнительного датчиков курса, выходами основных и дополнительных дифференцирующих и интегрирующих цепочек, обмотками основного и дополнительного датчиков обратной связи и входами основного СО и дополнительного усилителей мощности, причем основной и.дополнительный испол ю нительные механизмы соединены электрическими цепями с узлами управления по времени через переключатель режимов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| АВТОРУЛЕВОЙ ДЛЯ СУДОВ | 0 |
|
SU254356A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
