10 Изобретение относится к судостроени в частности судовым авторулевым. Известен судовой авторулевой, содерж щий связанный с гирокомпасом датчик ку са, дифференцирующее устройство, интегр тор, сумматор и штурвал, связанный со следящей системой управления рулем Cl D Недостатком известного авторулевого является невысокое обеспечение ходовых качеств судна. Цель изобретения - упрощение конструкции авторулевого и повышение ходовых качеств судна. Поставленная цель достигается тем, что судовой авторулевой, содержащий связанный с гирокомпасом датчик кур Са, дифференцирующее устройство, интегр тор, сумматор и штурвал, связанный со следящей системой управления рулем, сна жен усилителем с зоной нечувствительности, задатчиками угловой скорости, угла перекладки руля и переключателем режимов управления, а дифференцирующее устройство включает последовательно соединенные демодулятор с фильтром и усилитель с автоматической регулировкой усиления, причем, датчик .курса вьшолнен в виде интегрирующего устройства, и связан с гирокомпасом через упомянутые демодулятор и усилитель с автоматической регулировкой УСИЛЕНИЯ, при этом вход интегрирующего устройства соединен с выходом задатчика угловой скорости, а его выход - с входами интегратора и усилителя с зоной нечувствительности, выходы которых подключены к сумматору, связанному через переключатель режимов управления со следящей системой управления рулем. Кроме того, штурвал кинематически связан с задатчиком угла перекладки руля, выход которого через переключа- . тель режимов управления подключен к следящей системе управления рулем. На чертеже представлена функциональная схема авторулевого. Он содержит демодулятор 1 с фильтром, последовательно соединенный с усилителем 2 с автоматической регулировко усиления, причем вход демодулятора 1 с фильтром соединен с выходом усилителя,, следящей системы гирокомпаса, а выxooi усилителя 2 с автоматической регули рсвкой усиления - с входом интегрирующего устройства 3, на вход «которого подключен задатчик 4 угловой скорости. Выходы усилителя 2 и устройства 3 соединены с первым и вторым входакга усилителя 5 с зоной нечувствительности. 42 Выход усилителя 5 интегратора 6 подклю. чены к первому и второму входам суммаора 7, выход которого через переключатель 8 режимов управления подключен к входу следящей системы 9 управ;;{ения рулем. Штурвал 10 кинематически связан с задатчиком 11 угла перекладки рутю, выход которого через переключатель 8 режимов управления подключен к входу следящей системы 9 управления рулем. Авторулевой работает следуюцим образом. При отклонении судна от заданного курса на выходе усилителя следящей системы гирокомпаса появляется нвяряжение, пропорциональное угловой скорости отклонения судна от курса. Пройдя через демодулятор 1 с фильтром и ус;илитель 2. с автоматической регулироЕ кой усиления, сигнал поступает на первый вход интегрирукщего устройства 3, на выходе которого появляется сигнал, пропорциональный углу отклонения от заданного курса. Сигналы с усилителя 2 и устройства 3 поступают на вход усилителя 5 с зоной нечувствительности, С выхода усилителя 5 суммарный сигнал, пропорциональный скорости и углу отклонения судна от курса, поступает на первый вход сумматора 7, а на второй его вход сигнал, пропорциональный интегралу от угла отклонения от курса с интегратора 6. С выхода сумматора 7 сигнал чйрез пе- . реключатель 8 режимов управления поступает на вход следящей системы 9 управления рулем, которая перекла/зоьюает руль и под действием руля судно возвращается на заданный курс. Для осуществления поворота судна с заданной угловой скоростью задатч:яком 4 угловой скорости на второй вход уст ройства 3 подается необходимый сигнал. Сигнал с его выхода через усилитель 5 с зоной нечувствительности, сумматор 7 я переключатель 8 видов управления поступает на вход следящей системы 9 управления рулем. Последняя перекладьшает рутиь, и судно начинает поворачиваться. С выхода усилитедя 2 на первый в;1сод устройства 3 поступает напряжение, пропорциональное истинной скорости поворота судна. Когда напряжение на первом втором входах интегрирующего устройства 3 сравниваются, на выходе его постоянный сигнал, и руль закладывается на определенный угол, в результате чего судно поворачивается с заданной у1 ловой скоростью.
3: 10175944
С целью повышения на ежнехзти штурвюг нал с выхода оадагчнка 11 угла переклад10кинематически связан с задатчиком ки руля поступает на вход следящей систе11угла перекладки руля. При переключе мы 9 управления рулем, которая переклады НИИ переключателя 8 видов управления за- вает руль на угол, пропорциональный углу датчик 11 угла перекладки руля подйлюча-| поворота оггурвала. 10. Таким образом, ется к входу следящей системы 9 зпправле- при выходе из строя элементов автомати ния рулем.ческого управления, перекяащса руля, а
В этом случае исключаются все элеме - следовательно, управление судном обеспеты, работающие 6 автоматическом режиме, чивается с помощью штурвала 1р. и перекладка руля осуществляется от штург 10 Предлагаемый авторулевой прост по вала Ю. При повороте штурвала 1О сиг- конструкции в(надвжеи в работе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Авторулевой | 1988 |
|
SU1579851A1 |
| Система управления курсом судна | 1983 |
|
SU1131772A1 |
| СИСТЕМА УПРАВЛЕНИЯ СИЛОВЫМ ГИДРАВЛИЧЕСКИМ ПРИВОДОЛ1 СУДОВОГОРУЛЯ | 1967 |
|
SU206335A1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| Авторулевой | 1988 |
|
SU1527092A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| АВТОРУЛЕВОЙ, РЕАЛИЗУЮЩИЙ ПРОПОРЦИОНАЛЬНО- ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ ЗАКОН УПРАВЛЕНИЯ | 1968 |
|
SU213943A1 |
1. СУДОВОЙ АВТОРУЛЕВОЙ, содержаний связанный с гирококшасом датчик курса, дифференцирующее устройство, интегратор, сумматор и щтурвап, связанный со следящей системой управления рулем Ъ т л и ч а ю щ и и с я тем, что, с целью упрощения его jcoHCTpyKlora и поваышения ходовых качеств судна, он снабжен усилителем с зоной нечувствитепьности, задатчиками угловой скорости, угла перекладки руля и переключателем р кимов управления, а хофференпирующее устройство включает последовательно соединенные демодулятор с фильтром и усил таль с автоматической регулировкой усиления, причем датчик выполнен в виде интегрирующего устройсиай и связан с гирокомпасом, через упомянутые демодулятор к усилитель савтоматической регулировкой усиления, при этом вход интетрирукнце1П5 устройства соединен с выходом задатчика угловой скорости, а его выход - с входами интегратора и усилителя с зоной нечувствительности, выходы которых подключены к сумматору, связанному через переключатель peoKttMOB пра&ления со следящей системой ухфазэлення рулем. 2. Авторулевой по п. 1, о т л и ч а ю щ и и с я тем, что щтурвал кинематнчес«| ки связан с задатчиком угла перекладки руля, выход которого через переключатель режимов управления подключен к следящей системе управления рулём. 41 сд со 4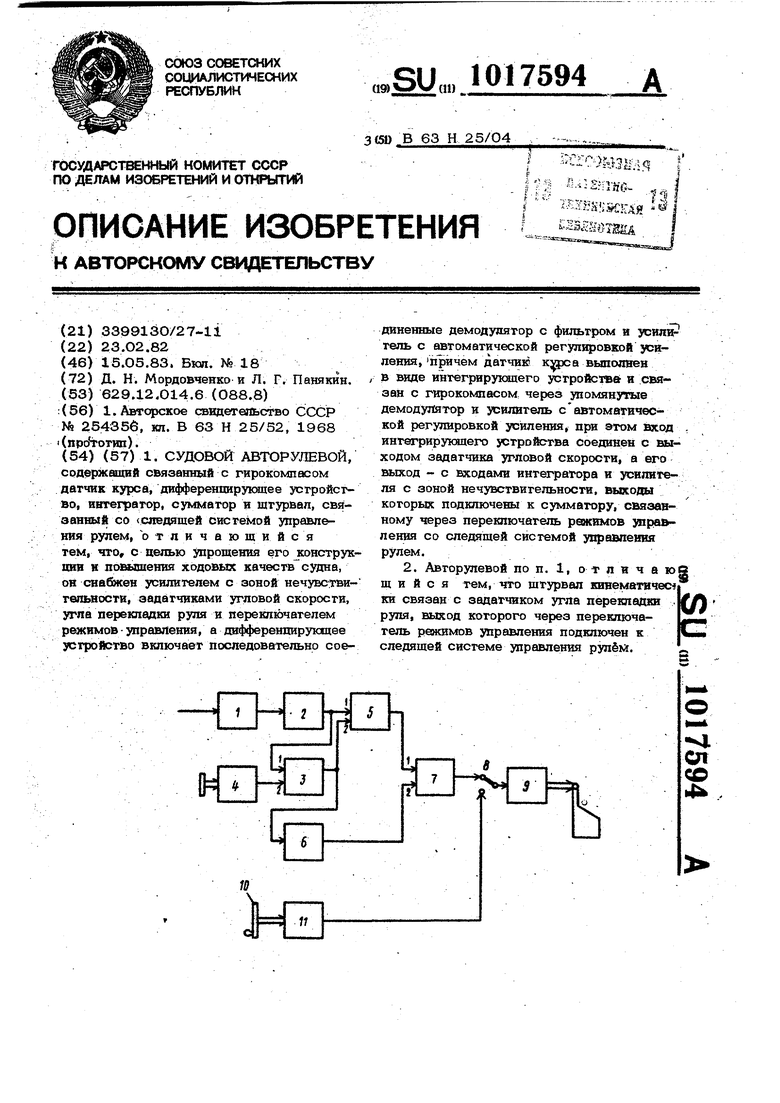
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| АВТОРУЛЕВОЙ ДЛЯ СУДОВ | 0 |
|
SU254356A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
