Известны способы коррекции систем автоматического управления по быстродействию с фиксацией экстремума производной регулируемого параметра.
Предложенный способ позволяет обеспечить стабилизацию системы при наличии внешних возмущений, выводящих ее из устойчивого состояния. Он отличается тем, что в момент (или несколько позже) достижения сигналом рассогласования экстремального значения его фиксируют, запоминают это значение сигнала и подают в цепь управления компенсирующий сигнал по величине, равный сигналу рассогласования, но противоположный ему по направлению.
Чтобы получить различные виды переходных процессов в системе, компенсирующий сигнал подают с различной задержкой относительно момента, когда сигнал рассогласования достигает экстремального значения.
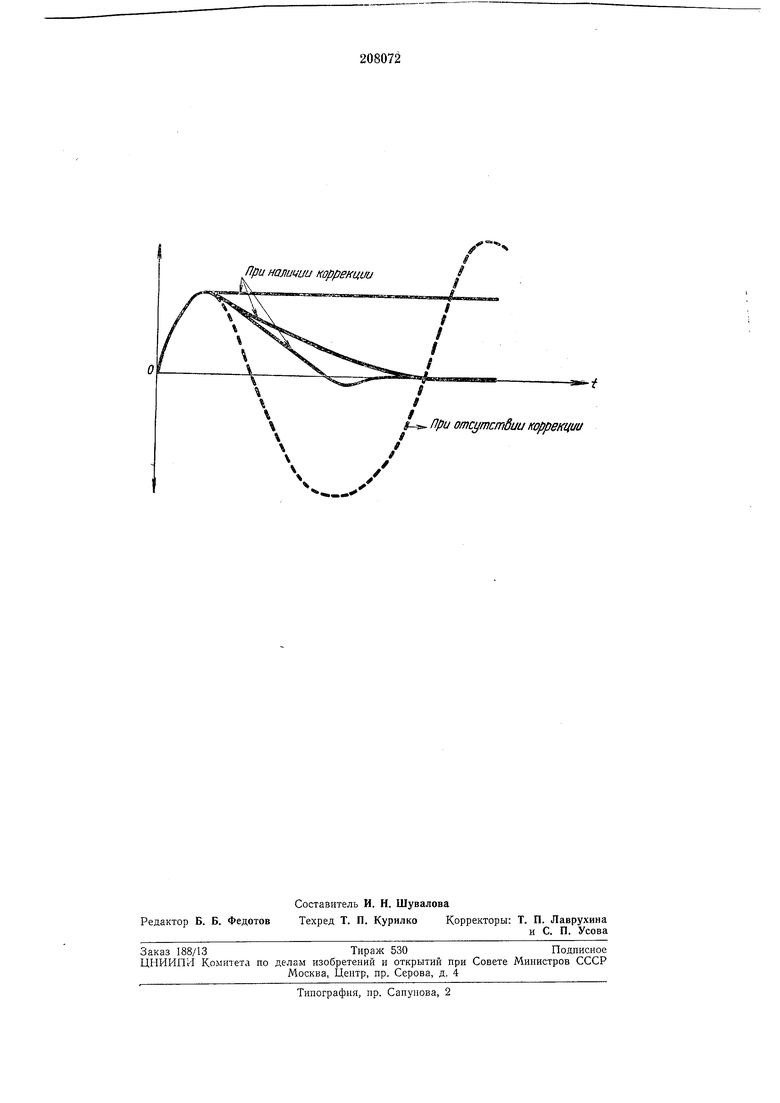
Переходный процесс при коррекции системы управления приведен на чертеже.
Сначала происходит нарастапие, а затем уменьшение отклонения регулируемого параметра при отсутствии действия коррекции. В точке экстремума подают компенсирующий сигнал и снижают управляющий сигнал до нуля. Затем система управления движется при отсутствии сигнала управления.
получить различные виды переходного процесса. Для этого сигнал подают с различной задержкой относительно момента достижения сигналом рассогласования экстремального значения.
Предмет изобретения
1.Способ коррекции систем автоматического управления по отклонению регулируемого параметра, отличающийся тем, что, с целью обеспечения стабилизации системы при наличии внешних возмущений, выводящих ее из устойчивого состояния, измеряют сигнал рассогласования, фиксируют момент достижения им экстремального значения, запоминают это значение сигнала и подают в цепь управления компенсирующий сигнал, равный ло величине запомненному значению сигнала рассогласования, но с противоположным знаком.
2.Способ по п. 1, отличающийся тем, что, с целью получения различных видов переходных процессов в системе, компенсирующий сигнал подают с различной задержкой относительно момента достижения сигналом рассогласования своего экстремального значения.
При наличии коррекции
.-
При отсутстбии коррекции
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Способ управления технологическим процессом и устройство для его осуществления | 1978 |
|
SU1110843A1 |
| Автоматизированная адаптивная система управления рудновосстановительной электропечи | 1989 |
|
SU1806448A3 |
| Автоматизированная система управления рудовосстановительной электропечи | 1986 |
|
SU1401242A1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ, СОСТОЯЩАЯ ИЗ ГОЛОВКИ СОВМЕЩЕНИЯ ИЗОБРАЖЕНИЙ И САМОНАСТРАИВАЮЩЕГОСЯ АВТОПИЛОТА | 1960 |
|
SU1840806A1 |
| Цифровой регулятор давления | 1979 |
|
SU809060A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ | 1992 |
|
RU2032925C1 |
| Способ автоматического регулированияТЕплОВОгО РЕжиМА КОНВЕйЕРНОйлиНии для ОбжигА КЕРАМичЕСКиХ издЕлий | 1979 |
|
SU815446A1 |