Изобретение относится к области грузоподъемных механизмов, в частности к грузозахватным устройствам для транспортирования полых вертикально расположенных изделий цилиндрической формы.
Известны грузозахватные устройства с автоматическим управлением для полых вертикально расположенных изделий цилиндрической формы, например железобетонных труб и колец, включающие корпус с опорными лапами, обойму, ползун, выдвижные упоры и механизм фиксации выдвижных упоров. Однако они не пригодны для транспортирования изделий низкой механической прочности, например слабоармированных труб и колец, которые под действием сил, возникающих на упорах захвата, деформируются и разрушаются.
Целью предлагаемого грузозахватного устройства является обеспечение сохранности полых изделий цилиндрической формы низкой прочности при их захвате и транспортировании. Это достигается тем, что выдвижные упоры грузозахватного устройства выполнены в р.пде дуг, шарнирно соединенных между собой и образующих разъемное разжимное ко.1ьцо, связанное с корпусом захвата и механизмом фиксации шарн.ирно-рычажной системой.
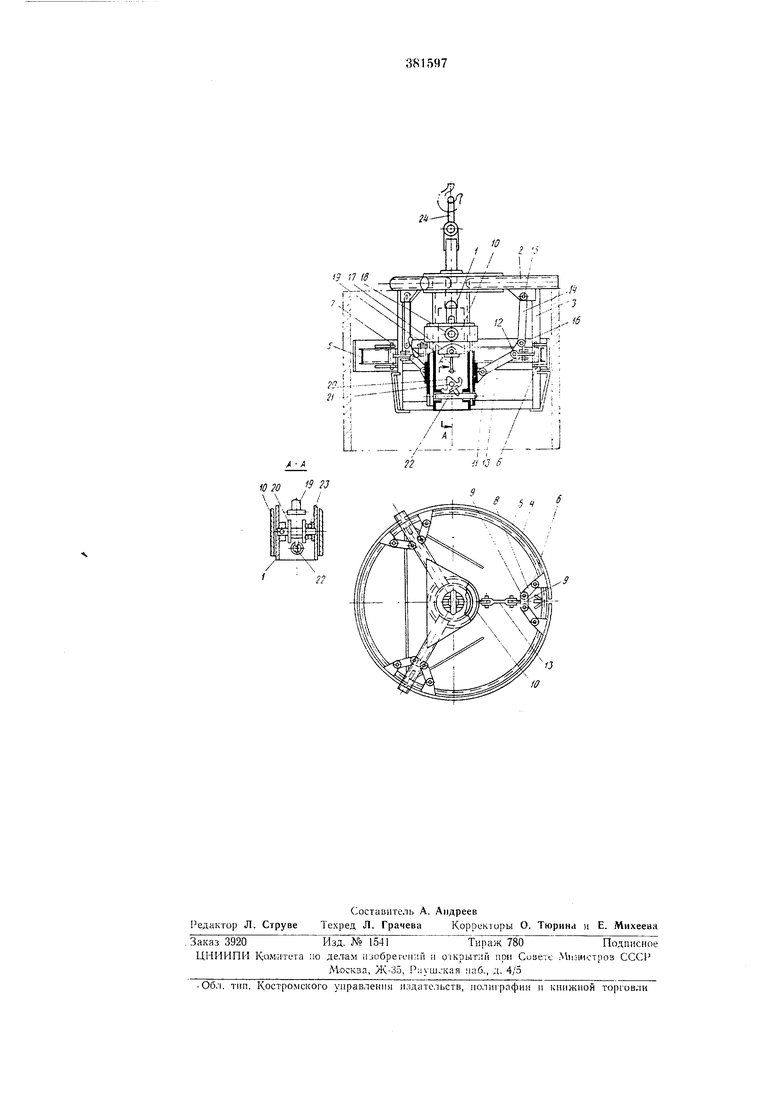
На чертеже изображено предлагаемое грузозахватное устройство в двух проекциях. Грузозахватное устройство состоит из корнуса устропстпа, разъемного разжимного кольца, шарнирно-рычажной системы, подвески разжимного кольца и механизма факс: ц.ии. Корпус за.чвата содержит цилиндр /, опорные лапы 2, стойку 3 и кольцо 4. Разъемное разж.и.мное ко.тьцо состоит из дуг ,7, осей шарниров 6 и 7, тяг в ;i KpecTOBiiHbi 9. Шарнирно-рычал пая система {зыполнеиа из трех взаимосвязанных звеньев, расположенных в вертикальной плоскости под углом 120°. Она включает обойму W, оси шарпнров 11 и }2 и тяги 13. Шарнирно-рычажная система осью шарнира 12 соединена с разъемным кольцом 5. Подвеска разжимного кольца включает тяги М я оси шарниров /5 и 16. Ус)1ки, приваренные к концам дуг 5, охватывают кольцо 4 корпуса и скользят по нему. Механизм фиксации включает ползун 17, палец 18, нодвесно упор /Я переключатель 20, ось 21, фиксатор 22 и обойму 10.
Цилиндр J является направляющей для ползуиа 17 п обоймы 0. В средней части цилиндр имеет овальное отверстие для пальца 18. В нижней части внутренней полости цилиндра на оси 21 укрепле)ы переключатель 20 и прижимная пружина 23. Несколько ниже переключателя, перпендикулярно к его оси, в направляющих втулках установлен фиксатор 22. Переключатель 20 представляет собой два спаренных равносторонних треугольника. На
двух боковых плоскостях переключателя имеются выступы, являющиеся упорами для подвесного упора 19. К центру нижней части переключателя на соединительной пластине приварен хвостовик, входящий Б продольную прорезь фиксатора 22. Фиксатор выполнен в прутковой стали с заостренными концами и с прорезью в центре для ввода хвостовика переключателя 20. Обойма 10 выполнена в виде цилиндра в верхней и нижней части усиленного бандажами. К наружной части обоймы приварены усики. В верхней части обоймы 10 просверлено отверстие для пальца 18. В нижней части на одной стенке просверлено другое отверстие для ввода фиксатора 22, а на противоположной стороне в той же плоскости имеется прорезь для выхода фиксатора 22. С помощью пальца 18 обойма подвещена к ползуну 17, при этом она имеет свободу относительного перемещения. Тяги 13 и 14 прямоугольного или двутаврового сечения изготавливаются из полосовой или профильной стали. Концы тяг имеют вид вилки с просверленными отверстиями для осей шарниров. Крестовина 9 изготавливается из стали, и.меет четыре отверстия, расположенные попарно в двух взаимно перпендикулярных плоскостях. Ползун 17 представляет собой металлический стержень с продольным овальным отверстием для соедипптельного пальца 18. Верхняя часть ползуна 18 утонченная, имеет отверстие для крепления кольца 24, нодвещиваемого на крюк крапа. Подвесной упор 19 имеет форму двутавра. Верхним концом подвесной упор 19 подвещен к ползуну 17.
Захват работает автоматически. Цикл работы чередуется.
В нерабочем положении захват висит на крюке крана. Разжимное кольцо 5 сжато, зб-ойма 10 находится в нижнем крайнем положении н сцеплена с цилиндром / корпуса захвата фиксатором 22.
Для того, чтобы поднять груз, «ВОДИТСЯ во внутреннюю полость изделия и опускается до ослабления троса подвески крюка крана. Корпус захвата, коснувшись опорными ла Нками 2 изделия, опирается на изделие, а ползун 17, продо.ркая апускаться в полости цилиндра /, подвесным упором 19 упирается 1 выступы на одной из плоскостей переключателя 20 и поворачивает его па оси 21. Хвостовик переключателя 20 перемещает фиксатор 22 в противоположиую сторону, тем самым выводит обойму 10 из зацепления с цилиндром.
После этого начинается подъем. В первый период подъема крюка крана поднимается только ползун 17, причем до тех пор, пока не выберется люфт в его прорези. Далее он через палец 18 потянет за собой обойму 10, тем самым приводят в действие шарнирно-рычаждую систему захвата. Тяги 13, упираясь в крестовину 9, воздействуют на разжимное кольцо Дуги 5, обладаюише соответствующей л есткостью, упираются средней частью в изделие,
затем выпрямляются и плотпо прижи.маются к не.му. В таком виде груз переносится к месту назначения.
Для того, чтобы груз поставить, необходимо захват установить на место и плавно опустить
крюк крана до легкого ослабления троса. Корпус захвата, опираясь на изделие, остается неподвижным, обойма 10, скользя по цилиндру 1 под действием собственного веса, опускается и через щарнирно-рычажную систему уменьщает диаметр разжимного кольца. Как только обойма 10 доходит до нижнего крайнего положения, ползун 17 подвесным унором 19 вновь поворачивает переключатель 20 на оси 21, фиксатор 22 перемещается в противоположном направлении, входит в отверстие обоймы 10 и фиксирует ее в нижнем крайнем положении, а разжимное кольцо - в сжатом состоянии. В таком виде захват выводится из полости изделия, и цикл работы повторяется.
П р е д .м е т и з о б р е т е н и я
Грузоза.хватное устройство с автоматическим управлением для нолых вертикально расположенных изделий цилиндрической формы, включаю1цее корпус с опорными лапами, обойму, ползун, выдвижные упоры и механизм 1|1иксации выдвижных упоров, отличающееся тем, что, с целью обеспечения сохранности изделий низкой прочности при их захвате и транспортировании, выдвижные упоры выполнены в виде дуг, И1арнирно соединенных между собой и образующих разъемное разжимное кольцо, связанное с корпусом захвата и механизмом фиксации игарнирпо-рычажной системой.
f}
10
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ СЛИТКОВ | 2006 |
|
RU2309889C1 |
| Захват для изделий с отверстием | 1990 |
|
SU1791333A1 |
| Подвесное устройство для технического обслуживания автомобилей | 1983 |
|
SU1146224A1 |
| ГРУЗОЗАХВАТНОЕ ПРИСПОСОБЛЕНИЕ | 1971 |
|
SU290528A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| Грузозахватное устройство | 1984 |
|
SU1196329A1 |
| Грузозахватное устройство | 1977 |
|
SU901230A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| Грузозахватное устройство | 1990 |
|
SU1787921A1 |
| Автоматический электромагнитныйзАХВАТ | 1979 |
|
SU839969A1 |