Известны устройства для захвата и транспорти,ровки труб, содержаш,ие траверсу, крановую подвеску, взаимодействующую с фиксатором, и раму прямоугольной формы со смонтированными кривошипами, связанными между собой рейкой и соединенными с вертикальными поворотными стержнями, иесущими лапы для подхвата труб.
Отличие предложенного устройства - в том, что оно снабжено приспособлением, состоящим из укрепленного на рейке углового кривошипа и соединенного с ним плариирно-стерл невого механизма, связайиого с траверсой и рамой. Благодаря этому автоматизируется процесс захвата труб.. На фиг. 1-3 схематически изображено описываемое ycTpoiicTBO в трех проекциях.
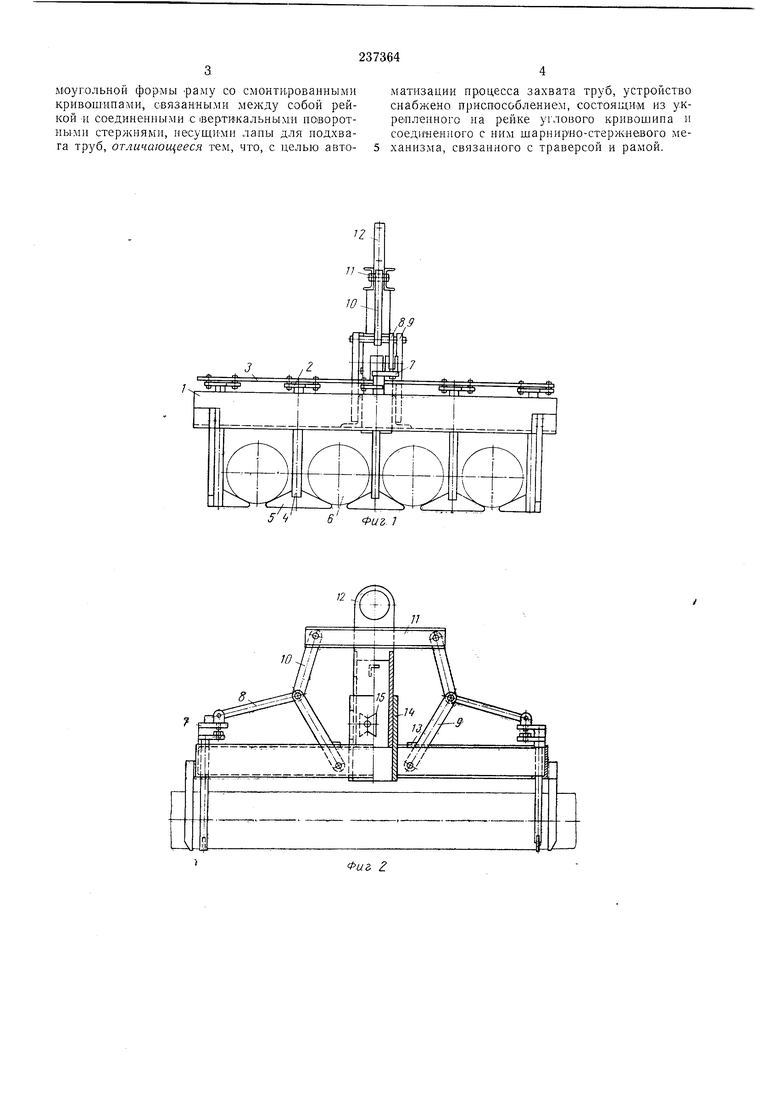
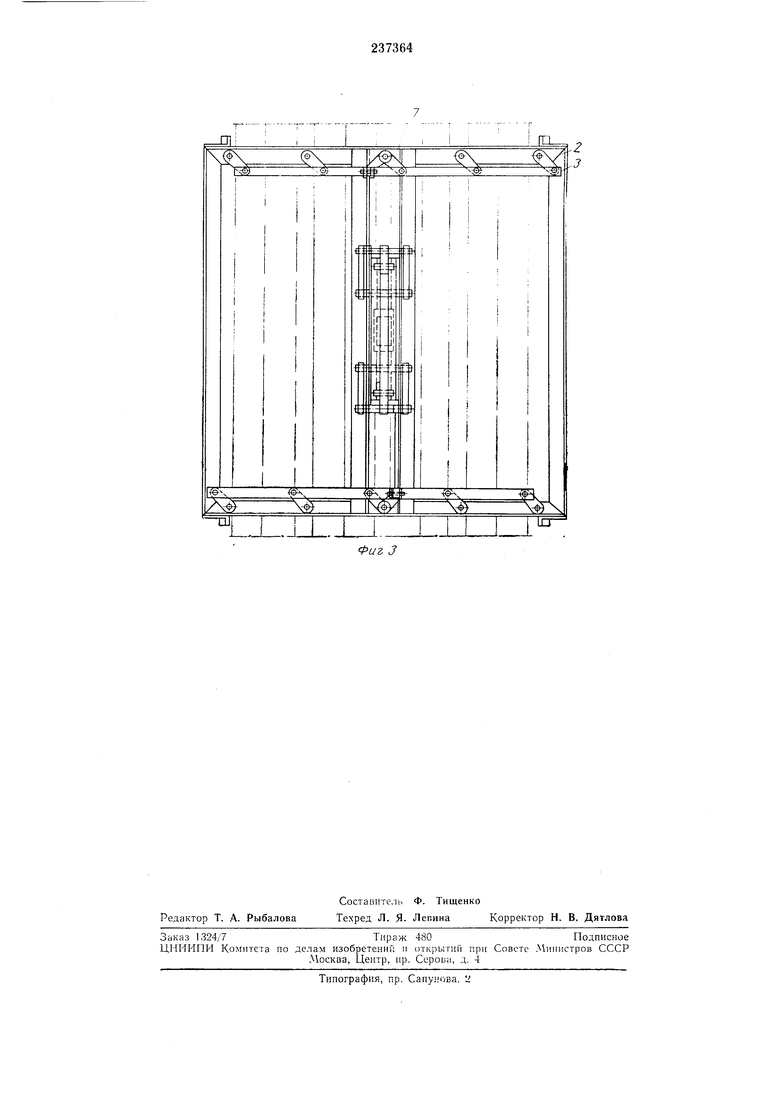
На раме 1 прямоугольной формЫ-смонтированы К ривошипы 2, связанные ..между собой рейкой 3. Кривошипы соединены, с вертикальными поворотными сте ржнями 4, несущими лапы 5 для подхвата .труб 6.
Приспособление для автоиматизации процесса захвата труб содержит угловой кривошип 7 и шарНирно-стержневой механизм, включающий стержень Ь, соединенный с угловым кривошипом, стержень 9, связанный с рамой, и стержень 10 с траверсой 11, свободно лел ащей да выступах крановой подвески 12, являющейся ползуном механизма фиксации. На раме укреилены упоры 13 и стойки 14 со звездочкой 15.
Устройство работает следующим образом. Когда звездочка 15 заклинивает ползун 12
относительно стойки 14, стержень 9 опущен, а стержень 8 разворачивает лапы J в нерабочее положение, т. е. параллельно продольной оси труб, улои енных, например, в штабель. В таком виде ycTpoilcTBO транспортируется без
труб.
При опускании устройства на трубы, лапы вводятся в зазоры ними. Рама останавливается, а ползун, продолл ая опускаться, разворачивает звездочку 15 вертикально. В
этом пололч:ении ползун иоднимается, захватывает траверсу 11 п через стерл ни 10, 9 н 8, а таюке кривошипы 7 и 2 поворачивает лапы на 90 , подводя их под трубы, при последующем их опускании на опору.
При движении ползуна вниз, звездочка 15 сцепляет ползун со стойкой 14, а лапы под действием веса траверсы разворачиваются на 90° в нерабочее пололсение, и трубы освоболадаются.
Предмет изобретения
моугольной форМы pajviy со смони-фованными кривошипами, связанными между собой рейкой и соединенными с вертикальными поворотными стержнями, несущими лалы для иодхвага труб, отличающееся тем, что, с целью автоматизации процесса захвата труб, устройство снабжено приспособлением, состоящим из укреплеиного иа рейке углового кривошипа и соединенного с ним шарнирно-стержневого механизма, связанного с траверсой и рамой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический захват | 1971 |
|
SU537020A1 |
| Захватное устройство для длинномерных изделий | 1988 |
|
SU1731718A1 |
| Захватное устройство | 1982 |
|
SU1054273A1 |
| КРАНОВЫЙ ВИЛОЧНЫЙ ЗАХВАТ | 1966 |
|
SU181797A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ ДЛЯ ШТУЧНЫХ ГРУЗОВ | 1970 |
|
SU264650A1 |
| Автоматический захват для штучных грузов | 1981 |
|
SU1013386A1 |
| АВТОМАТИЧЕСКИЙ ТОРЦОВЫЙ ЗАХВАТ ДЛЯ ТРУБ | 1968 |
|
SU213314A1 |
| Вертикальный накопитель | 1989 |
|
SU1698148A1 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
f г
Фиг,. 1
Фиг. 2
ML
W
сж;
.
a
ie ,j
w:
::)
LD
