Изобретение относится к способам подачи заготовок с исходных позиций на рабочие позиции обрабатывающей машины.
Известен способ подачи заготовок на рабочие позиции машины, при котором перемещение заготовок осуществляют при возвратнопоступательном движении захватов.
Этот способ не обеспечивает безударного захватывания заготовок в исходных позициях и безударную загрузку (разгрузку) рабочих позиций; кроме того, использование этого способа не позволяет увеличить производительность машины путем сокращения вспомогательного времени.
Известен также способ подачи заготовок на рабочие позиции машины, при котором перемещают заготовки при вращательном движении захватов, например подача заготовок с исходных позиций разгрузочного ротора на рабочие позиции основного ротора. Этот способ также не обеспечивает безударной подачи заготовок из-за скачкообразного изменения ускорения.
Цель изобретения - создать способ подачи заготовок, преимущественно в форме тел вращения, с исходных позиций на рабочие позиции обрабатывающей машины, который при сокращенном вспомогательном времени обеспечивает безударное захватывание заготовок в исходных позициях, плавное перемещение их
и безударную загрузку (разгрузку) рабочих позиций, что позволяет значительно увеличить производительность машины.
Предложенным способом заготовки перемещают при помощи захватов, движущихся по циклоидальным кривым. Эти циклоидальные кривые получают непрерывным обкатыванием без скольжения по меньщей мере одной условной окружности, образованной вращением
захвата вокруг своей оси, по другой условной окружности, которой касается первая условная окружность.
Использование свойств циклоидальных кривых обеспечивает безударное захватывание
заготовок в исходных позициях и безударную загрузку (разгрузку) рабочих позиций ма.Ц1ИНЫ.
При подаче заготовок на рабочие позиции обрабатывающей мащины, в которой исходные и рабочие позиции расположены на одрой окружности, захватывание и загрузку (разгрузку) заготовок осуществляют в точках возврата циклоидальных кривых, в которых скорости захвата равны нулю.
В случае подачи заготовок на рабочие позиции роторных машин, в которых исходные и рабочие позиции размещены соответственно на двух концентрично расположенных окружностях, одной из которых является окружт
тора, безударное захватывание заготовок в исходных позициях осуществляют в точках возврата циклоидальных кривых, а безударную загрузку (разгрузку) рабочих позиций - в точках максимальной скорости движения захватов по этим циклоидальным кривым, являющихся также точками возврата циклоидальных кривых в относительном движении ротора с захватами.
Для изменения количества исходных и рабочих позиций берут по меньшей мере два захвата со смещенными центрами и заданными направлениями, описывающих по меньшей мере две циклоидальные кривые, получаемые при относительном движении ротора с захва та ми.
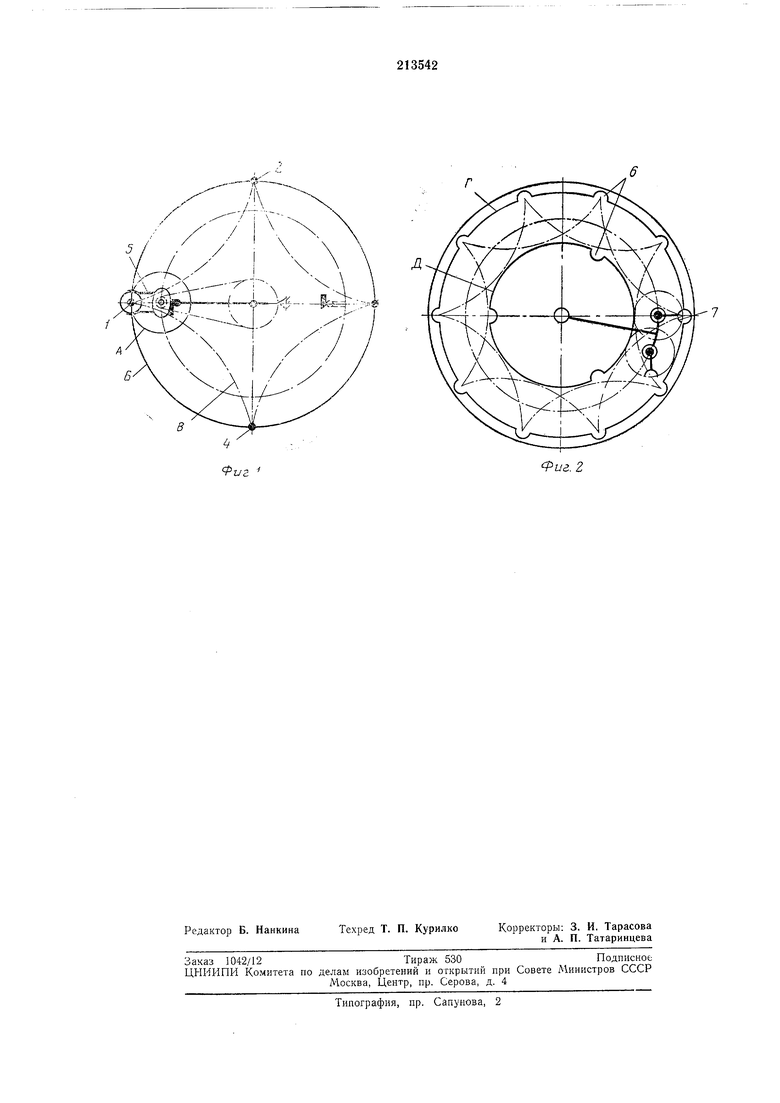
На фиг. 1 дана схема загрузки -при помощи одного захвата; ,на фиг. 2 - то же, с двумя захватами.
Деталь из исходной 1 позиции передается в одну из последующих 2, 3, 4 рабочих позиций за счет перемещения захвата по циклоидальной траектории В, образованной качением без скольжения условной окружности А по условной окружности Б. При этом позиции заг.рузки и освобождения захвата 5 расположены в точках возврата циклоидальной кривой, в которых скорость захвата обращается в нуль, а ускорение в силу кинематических свойств циклоидальной кривой изменяется плавно. Это обеспечивает безударную работу загрузочного устройства, реализующего описанный способ.
Особенностью способа является также и то, что он допускает построение множества вариантов загрузочных устройств, обладающих различными технологическими возможностями. В частности, на основе этого способа iMOгут быть построены компактные роторные линии, рабочие и транспортные роторы которых расположены вертикально на одной оси, что приводит к значительной экономии производственных площадей, при высоких темпах и ритмичной работе обрабатывающей мащины, следовательно, к значительному повышению ее производительности.
При необходимости повысить частоту передачи заготовок при сохранении общего темпа работы можно увеличить число перевалочных позиций 6, расположив их на двух концентрических окружностях Г к Д, vi осуществлять передачу при помощи двух (или более) захватов 7.
Предлагаемый способ может быть применен при автО|Матизации загрузки (разгрузки) рабочих позиций обрабатывающего оборудования, например, в токарных станках и автоматах прессового и сборочного оборудования, роторных машин, роторных и автоматических линий.
Предмет изобретения
1.Способ подачи заготовок, преимущественно в форме тел вращения, отличающийся тем, что подачу заготовок при помощи захватов осуществляют по циклоидальным кривым, получаемым непрерывным обкатыванием без скольжения по меньшей мере одной условной окрулшости, образованной вращением захвата вокруг своей оси, по другой условной окружности, которой касается первая условная окружность, обеспечивая при использовании свойств циклоидальных кривых плавное перемещение заготовок и безударное захватывание заготовок в исходных позициях и безударную загрузку (разгрузку) рабочих позиций.
2.Способ но п. 1, отличающийся тем, что для подачи заготовок на рабочие позиции обрабатывающей машины, IB Которой исходные и рабочие позиции расположены на одной окружности, безударное захватывание заготовок в исходных позициях и безударную загрузку (разгрузку) рабочих позиций осуществляют в точках возврата циклоидальных кривых.
3.Способ по п. 1, отличающийся тем, что для подачи заготовок на рабочие позиции роуорных машин, в которых исходные и рабочие .дозиции размещены соответственно на двух концентрично расположенных окружностях, одной из которых является окружность, проходящая через рабочие позиции ротора, безударное захватывание заготовок в исходных позициях осуш,ествляют в точках возврата циклоидальных кривых, а безударную загрузку (разгрузку) рабочих позиций осуществляют IB точках максимальной скорости захватов по этим циклоидальным кривым, являющихся также точками возврата циклоидальных кривых в относительном ротора с захватами.
4.Способ по п. 3, отличающийся тем, что для изменения количества исходных и рабочих позиций берзт по меньшей мере два захвата со смещенными центрами и заданными направлениями, описывающих по меньщей мере две циклоидальные кривые, получаемые при относительном движении ротора с захватами.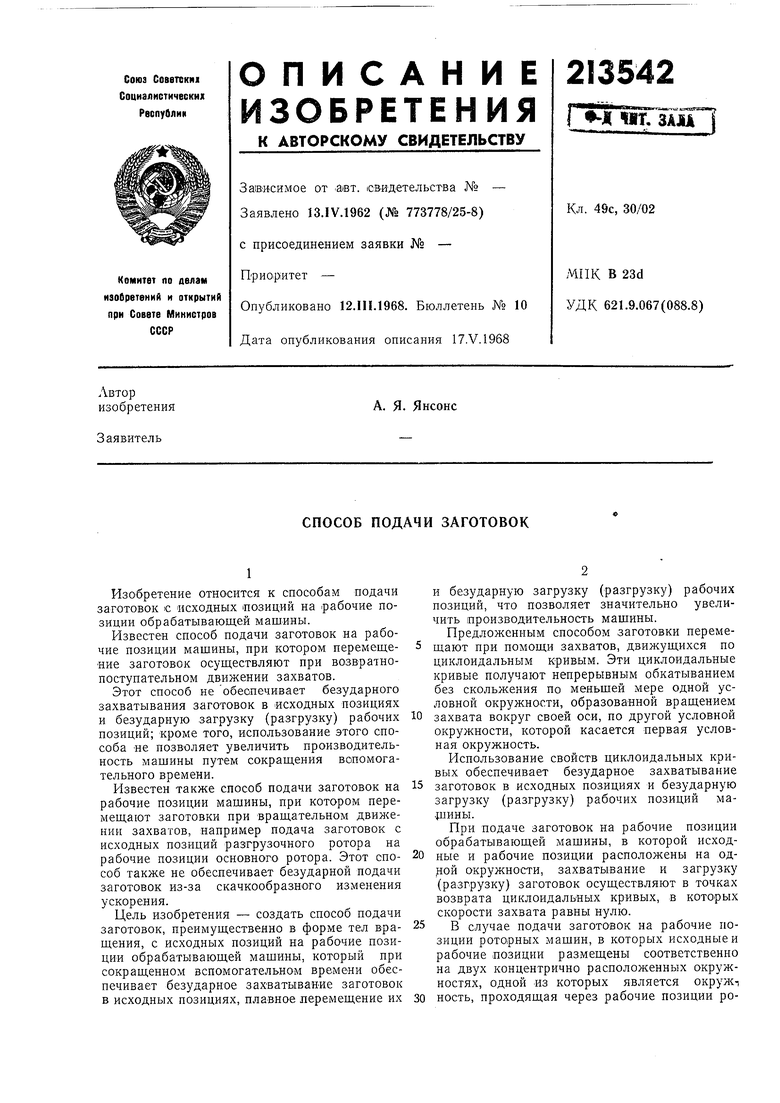
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 1968 |
|
SU213543A1 |
| Способ подачи заготовок | 1979 |
|
SU872189A2 |
| ЗАГРУЗОЧНОЕ УСТРОЙСТВОйсесоюзнАЯ 1иШШ-?аШ'!ЕШ1АЯ | 1973 |
|
SU361857A1 |
| Способ подачи заготовок | 1984 |
|
SU1278178A2 |
| Роторная машина | 1981 |
|
SU1038040A1 |
| ТРАНСПОРТНЫЙ РОТОР РОТОРНОЙ ТАБЛЕТОЧНОЙ МАШИНЫ | 2004 |
|
RU2296052C2 |
| Транспортный ротор | 1991 |
|
SU1815132A1 |
| Роторно-конвейерная машина | 1983 |
|
SU1180318A1 |
| Способ транспортирования изделий при обработке на роторной машине | 1988 |
|
SU1726330A1 |
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 1972 |
|
SU331876A1 |