Известны прессы-автоматы для изготовления различных изделий из проволоки путем гибки, содержащие механизм рубки, выполненный в виде ползунов, производящих срез концов изделия на плоскости гибочного пуансона. Однако такие автоматы дают острую кромку, что недопустимо на изделиях типа секций электрических машин.
В предлагаемом автомате установлен механизм рубки, выполненный в виде пуансонов, расположенных и перемещаемых во взаимно перпендикулярных плоскостях, и имеющих форму режущей кромки, соответствующую заданной форме концов изделий. Это позволяет получать изделия с концами требуемой формы.
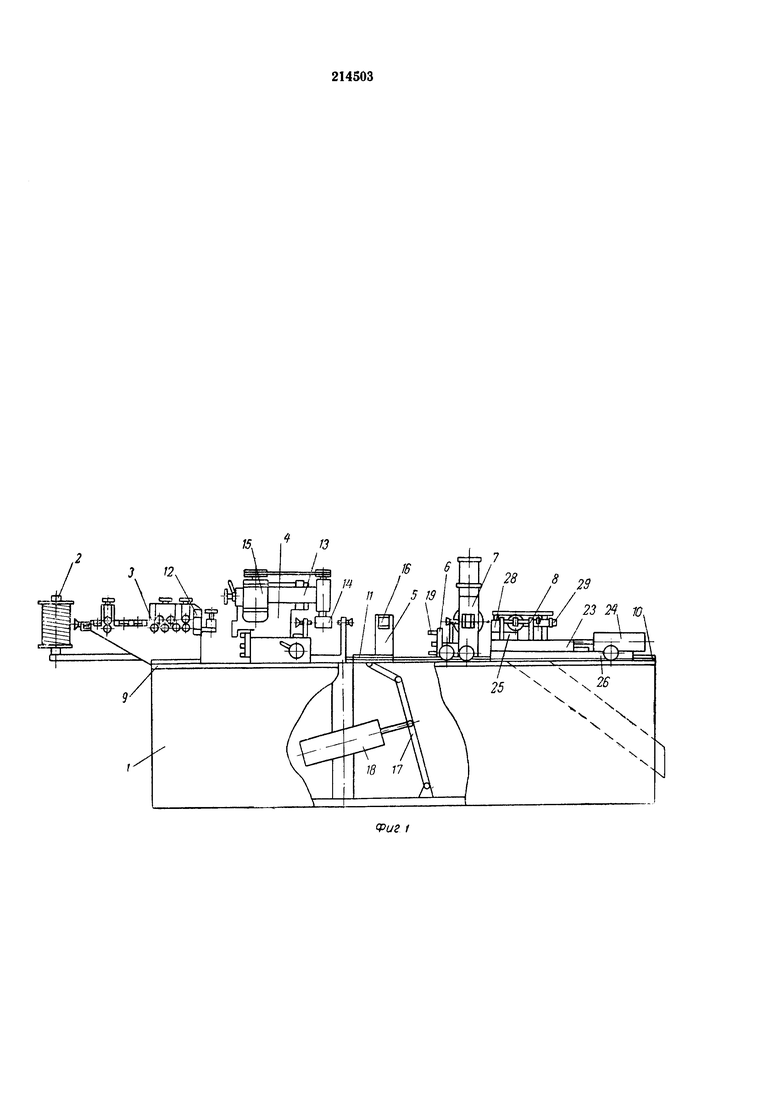
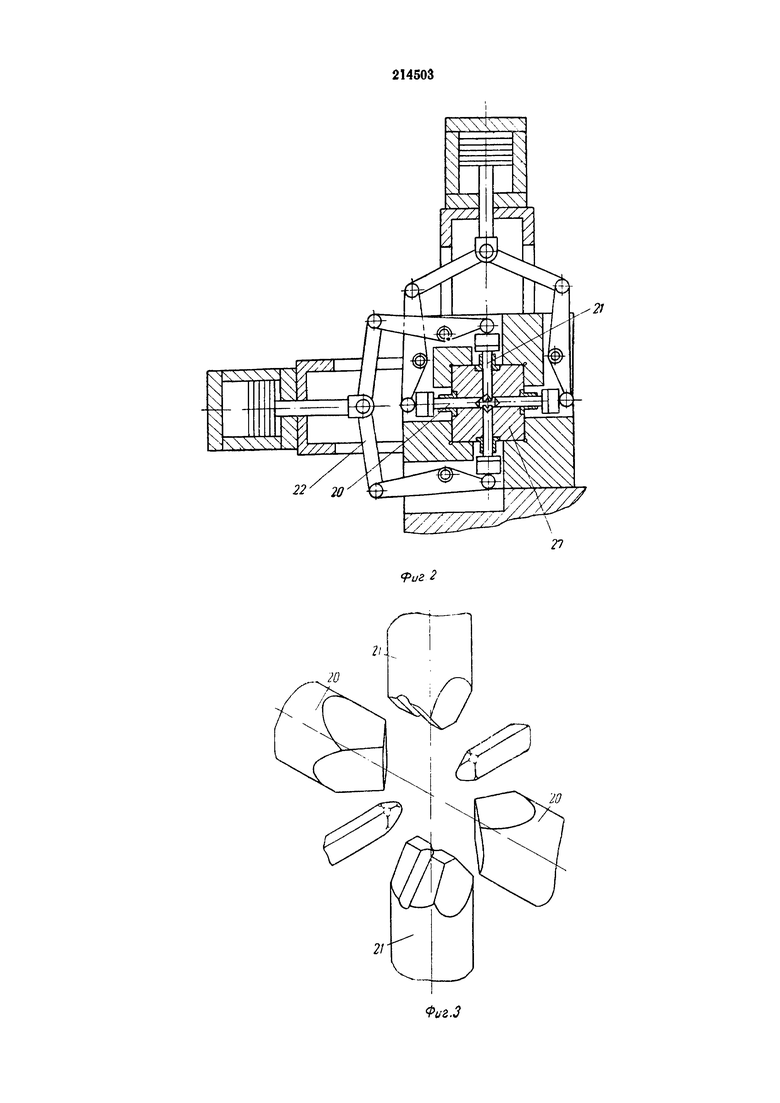
На фиг. 1 изображен общий вид описываемого автомата; на фиг. 2 - механизм рубки секций; на фиг. 3 - концы секций со скруглениями после рубки и две пары пуансонов.
В автомате применена пневмоэлектрическая схема управления с путевым контролем (на чертеже не показана).
Автомат состоит из следующих узлов (фиг. 1): станины 1, катушкодержателя 2, травильного механизма 3, механизма 4 зачистки, механизма 5 подачи, ограничителя 6 подачи, механизма рубки 7, механизма 5 гибки секций на ребро.
Станина содержит плиту 9 с направляющими 10, по которым перемещается каретка 11 механизма 5 и устанавливаются ограничитель 6 подачи, механизмы 7 и 8.
Правильный механизм 3 имеет регулируемые правильные ролики и прижим 12, с пневмоприводом, служащий для удержания провода (фиг. 1). Механизм 4 зачистки состоит из двух поворачивающихся на осях рычагов 13, на которых установлены крацовочные металлические щетки 14, вращающиеся от электродвигателей 15 (фиг. 1).
Механизм подачи 5 (фиг. 1) состоит из каретки 11 с зажимом провода 16 и рычажной системы 17, приводимой в движение пневмодвигателем 18.
Ограничитель 6 имеет револьверный диск с набором упоров 19 для настройки величины подачи различных секций (фиг. 1).
Механизм 7 рубки (фиг. 1, 2 и 3) состоит из рубочного приспособления с пуансонами 20 и 21, пневморычажного привода 22 и двух зажимов (на чертеже не показаны).
Механизм 8 гибки состоит из подвижной платформы 23 с пневмоприводом 24 и приспособления 25 гибки, причем платформа установлена на основании 26.
Приводом механизма зачистки служат два электродвигателя 15, а приводом остальных механизмов - пневмодвигатели.
Материал подается при помощи каретки 11, при этом конец провода проходит сквозь канал приспособления 27 (фиг. 2) и заходит в рабочие элементы приспособления 25, а затем материал зажимается прижимами. Сводя щетки 14 через рычаги от пневмоцилиндра, производят зачистку.
Рубка производится поочередно двумя парами пуансонов: сначала сводятся рубочные пуансоны 20, имеющие прямолинейную форму режущей кромки, и надрезают провод, затем сводятся формующие пуансоны 21, имеющие заданную форму режущей кромки, например дополнительные криволинейные канавки, которые при рубке прямоугольного провода на ребро скругляют кромки, полученные от действия первой пары пуансонов.
После рубки одновременно разжимается прижим, занимается заготовка подвижной губкой 28 гибочного приспособления 25. Затем происходит изгиб на ребро, производимый поворотом рычага 29 при движении платформы 23 вправо от пневмоцилиндра 24.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК ДЛЯ ГИБКИ ПРОВОЛОКИ И ПРУТКОВ | 2022 |
|
RU2803303C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Автомат для сборки | 1987 |
|
SU1428561A2 |
| Автомат для изготовления заготовок одновитковых секций обмоток электрических машин | 1979 |
|
SU884046A1 |
| АВТОМАТ ИЗГОТОВЛЕНИЯ ИЗ ПРУТКА, ПОСРЕДСТВОМ ДВУСТОРОННЕЙ ГИБКИ, ДЕТАЛЕЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ ТИПА КЛЕММ РЕЛЬСОВЫХ СКРЕПЛЕНИЙ | 2009 |
|
RU2412772C2 |
| Способ изготовления герметизирующих термоусаживаемых манжет и устройство для его осуществления | 1987 |
|
SU1523186A1 |
| УНИВЕРСАЛЬНО-ГИБОЧНОЕ УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ЗАГОТОВОК С ПОВТОРЯЮЩИМИСЯ ПО ВСЕЙ ДЛИНЕ ОДИНАКОВЫМИ ФРАГМЕНТАМИ | 2005 |
|
RU2310537C2 |
| Автоматическая линия для изготовления деталей типа скоб | 1982 |
|
SU1134351A1 |
| Автомат для изготовления изделий из проволоки типа шплинтов | 1982 |
|
SU1093380A1 |
| Штамп для гибки | 1985 |
|
SU1299658A1 |
Автомат для гибки провода, содержащий механизм мерной рубки заготовки, отличающийся тем, что, с целью получения изделий с концами требуемой формы, механизм рубки выполнен в виде пуансонов, расположенных и перемещаемых во взаимно перпендикулярных плоскостях, и имеющих форму режущей кромки, соответствующую заданной форме концов изделия.
