Известны подвесные погрузчики, имеющие опорную раму, смонтированную на ходовой каретке и несущую грузовую платформу.
Отличием предлагаемого погрузчика является то, что грузовая платформа зекреплена на приводных рычагах, образующих параллелограмный шарнирно-рычажный механизм, при помощи которого платформа плоскопараллельно перемещается по кругу. Повышение эффективности работы погрузчика обеспечивается повышением маневренности грузового органа.
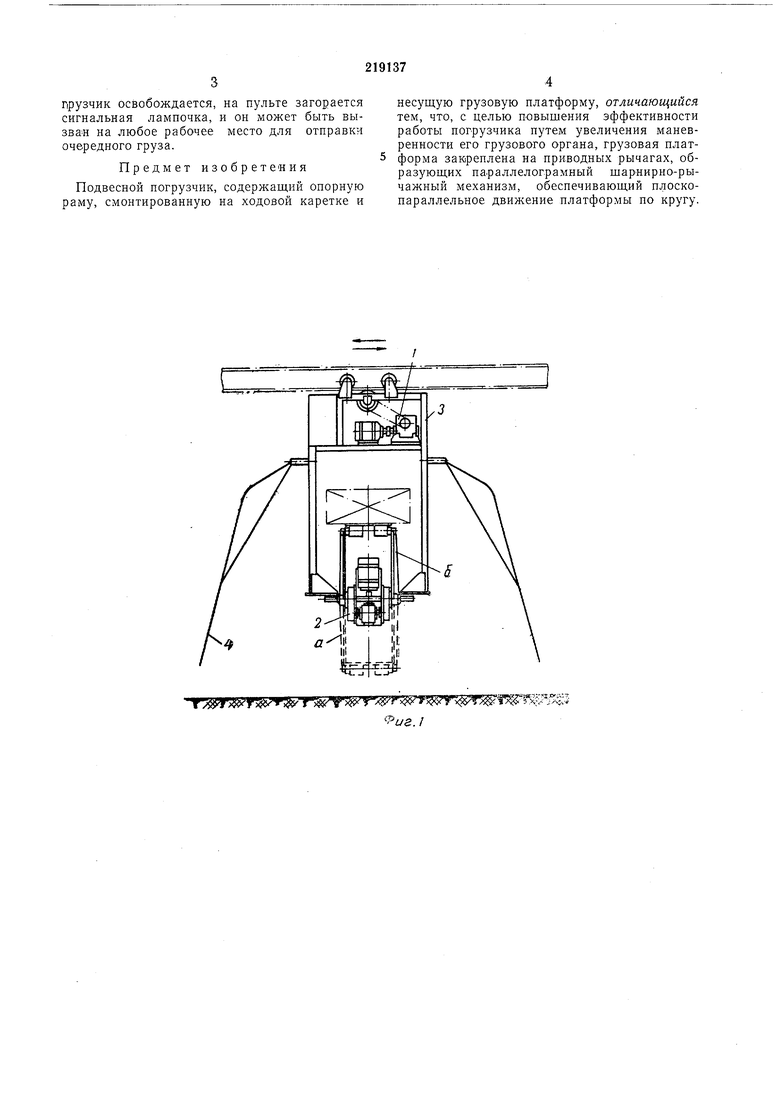
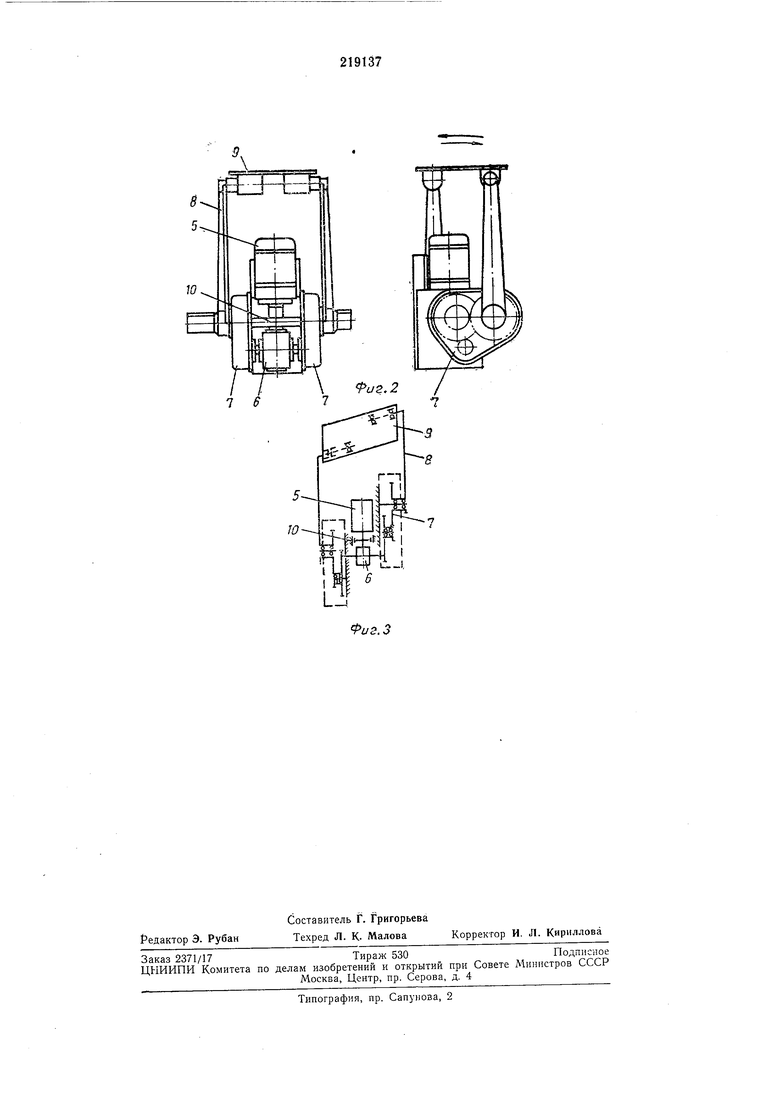
На фиг. 1 показан погрузчик на монорельсе, в .рабочем положении (а - перед погрузкой, б - перед разгрузкой); на фиг. 2 - параллелрграмный механизм перегрузки в двух проекциях; на фиг. 3 - то же, кинематическая схема.
Подвесной погрузчик имеет механизм передвижения 1 и параллелограмный механиз.м перепрузки 2, смонтированные на раме 3, и предохранительные щупы 4, которые автоматически отключают привод передвижения при наезде на препятствие.
Электродвигатель 5, параллелограмного щарни1рного механизма перегрузки через редуктор 6 и шестеренчатые передачи 7 вращает рычаги 8 ,несущие грузовую платформу 9. Рычаги разнесены на расстояние, позволяющее платформе плоскопараллельно перемещаться по кругу в любую сторону.
фиксирует платформу в верхнем и нижнем положениях. Погрузчик перемещается по подвесной трассе двутаврового сечения, имеющей спуски и подъемы до 15°, а также повороты в
плане. Питание осуществляется от пяти троллеев. Рабочие места оборудованы специальными столиками и могут располагаться по обе стороны от трассы. Паличие или отсутствие грузов на столиках контролируется конечны.ми выключателями, которые предотвращают подачу грузов на занятые места, а также холостые пробеги, если на отправочном месте нет груза.
При наличии сигнала на пульте управлекия, указывающего, что погрузчик свободен, отправитель набирает нужный адрес на своем пульте и нажимает кнопку отправки, погрузчик автоматически подъезжает и останавливается у столика с отправляемым грузом, включается двигатель механизма перегрузки. Грузовая платформа механизма перегрузки из нинснего положения перемещается плоскопараллельно по кругу в сторону груза, подхватывает его и поднимает в крайнее вер.хнее положение, в котором фиксируется тормозом.
Погрузчик автоматически перемещается по заданному адресу и останавливается у приемного столика. Платформа механизма перегрузки опускает груз на приемный столик и уходит в крайнее положение, в котором фиксируется тормозом. После этого попрузчик освобождается, на пульте загорается сигнальная лампочка, и он может быть вызвав на любое рабочее место для отправки очередного груза.
Предмет изобретен ни
Подвесной погрузчик, содерлсащий опорную раму, смонтированную на ходовой каретке и
несущую грузовую платформу, отличающийся тем, что, с целью повышения эффективности работы погрузчика путем увеличения маневренности его грузового органа, грузовая платформа зак|реплена на приводных рычагах, образующих па.раллелограмный шарнирно-рычажный механизм, обеспечивающий плоскопараллельное движение платформы по кругу.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШИШУНМИНЕКАПдд | 1972 |
|
SU348462A1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО АВТОМАТИЗИРОВАННОГОСКЛАДА | 1971 |
|
SU299418A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1967 |
|
SU192087A1 |
| Линия для настилания и раскроя полотна | 1978 |
|
SU791579A1 |
| ПЕРЕДВИЖНОЙ БОКОВОЙ ОПРОКИДЫВАТЕЛЬ БОРТОВЫХ ГРУЗОВЫХ АВТОМОБИЛЕЙО г,'лг]|т;;з --• ':'2;;;;;;4Ff;,^ Пn/ijA'ijVJKA | 1965 |
|
SU174125A1 |
| Транспортно-накопительная система | 1985 |
|
SU1312029A1 |
| Телескопический ленточный конвейер | 1976 |
|
SU745796A1 |
| ПОДВЕСНОЙ НЕСУЩЕ-ТОЛКАЮЩИЙ КОНВЕЙЕР | 1965 |
|
SU167771A1 |
| Прицепная тележка подвесной монорельсовой дороги | 1972 |
|
SU501911A1 |
| САМОХОДНЫЙ ДВУХСТРЕЛОВОЙ КРАН | 2011 |
|
RU2465191C2 |
W kVy Гл«г;
Pi/г. /
