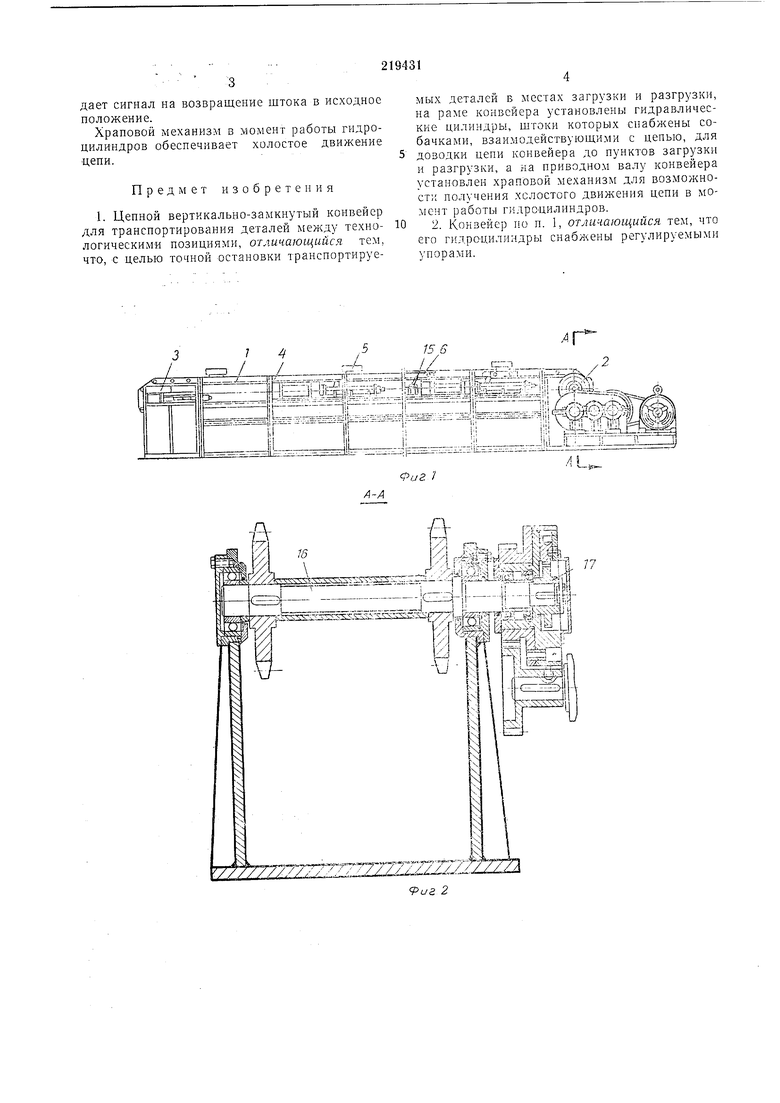
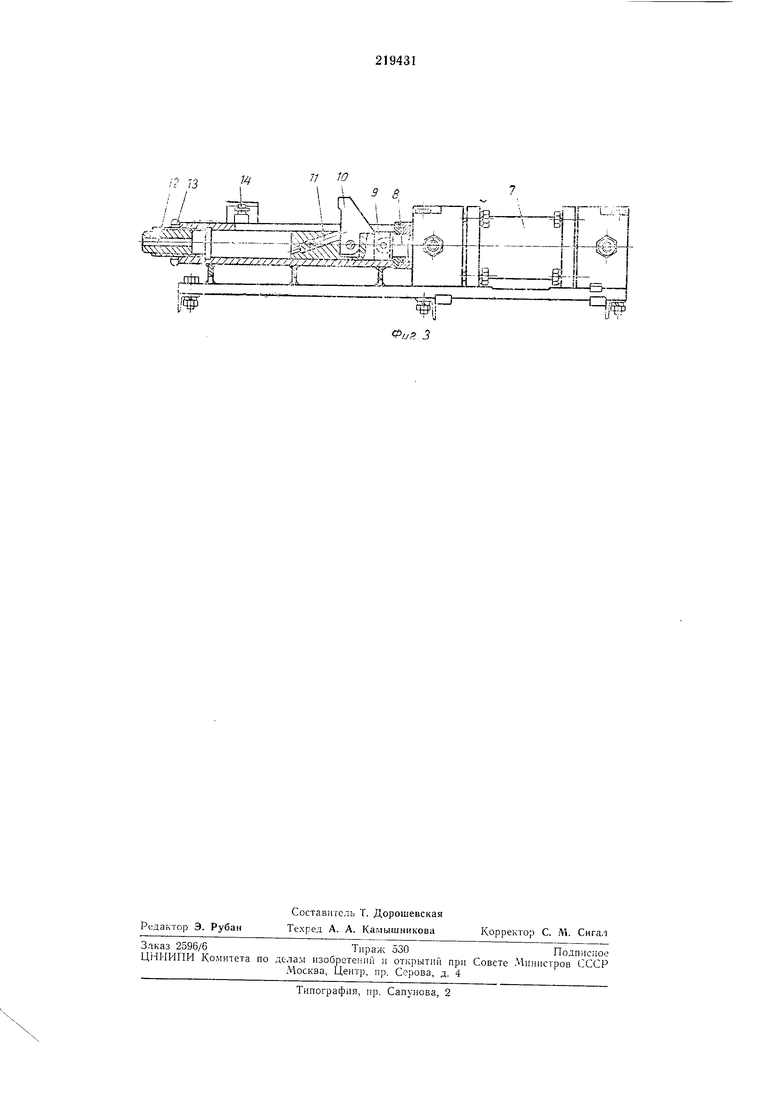
Изобретение относится к цепны.м вертикально-замкнутым конвейерам. Известны цепные вертикально-замкнутые конвейеры для транспортирования деталей между технологическими позициями. Отличием предлагаемого конвейера является то, что на его раме установлены дополнительные гидроцилиндры. Штоки гидроцилиндров снабжены собачками, взаимодействующими с ценью, для доводки цепи конвейера с рабочими гнездами до п)нктов загрузки и разгрузки. Это обеспечивает точную установку транспортируемых деталей в местах загрузки и разгрузки. На приводном валу конвейера установлен храповой механизм для получения холостого движения цепи в момент работы гидроцилиндров. Гидроцилиндры снабжены регулируемыми упорами. На фиг. 1 изображен предлагаемый конвейер, вид сбоку; на фиг. 2 - разрез по Л-А на фиг. 1; на фиг. 3 - гидроцилиндр в разрезе. На раме / конвейера установлены приводная 2 и натяжная 3 станции, которые огибает тяговый орган в виде пластинчатой цепи 4, снабженной рабочими гнездами 5 и упорами 6. На раме у приводной и натяжной станций смонтированы гидроцилиндры 7, к штокам 8 которых с помощью ползунов 9 щарнирно прикреплены качающиеся собачки /Л В исходном положении собачки прижимаются подпружиненным плунжером 11. Винтовые упоры 12 гидроцилиндров регулируют величину хода штока. Упоры закреплены контргайкой 13. Конечный выключатель М возвращает шток в исходное положение. Конечный выключатель 15, установленный на раме конвейера, останавливает пластинчатую цепь и включает гидроцилиндры. На валу 16 приводной станции установлен храповой механизм 17 для получения холостого движения пластинчатой цепи во время работы гидроцилиндров. При движении пластинчатой цепи, приводимой в действие от электродвигателя, ее упор 6 воздействует на конечный выключатель. Выключатель отключает электродвигатель в момент нахождения рабочих гнезд на расстоянии 200-300 лш от мест загрузки и разгрузки и одновременно включает гидроцилиндры. Дальнейшее движение до мест загрузки и разгрузки цепь получает от гидроцилиндра, при перемещении штока которого перемещается ползун с собачкой, захватывающей цепь. Когда ползун доходит до винтового упора, шток останавливается, собачка в этот момент воздействует на конечный выключатель, который
дает сигнал на возвращение штока в исходное положение.
Храповой механизм в момент работы гидроцилиндров обеспечивает холостое движение цепи.
Предмет изобретения
1. Цепной вертикально-замкнутый конвейер для транспортирования деталей между технологическими позициями, отличающийся тем, что, с целью точной остановки транспортируемых деталей в местах загрузки и разгрузки, на раме конвейера установлены гидравлические цилиндры, штоки которых снабжены собачками, взаимодействующими с цепью, для доводки цепи конвейера до пунктов загрузки и разгрузки, а на приводном валу конвейера установлен храповой механизм для возможност;: получения холостого движения цепи в момент работы гидроцилиндров.
2. Конвейер по и. 1, отличающийся тем, что его гидроцилиндры снабжены регулируемыми упорами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Поточно-механизированная сборочнаялиНия | 1978 |
|
SU804548A1 |
| Вертикально-замкнутый тележечный конвейер | 1977 |
|
SU745803A1 |
| Шаговый конвейер-накопитель | 1980 |
|
SU971736A1 |
| Автоматическая линия штамповки деталей из рулонного материала | 1989 |
|
SU1625565A1 |
| Устройство для транспортирования трубчатых изделий | 1982 |
|
SU1055710A1 |
| Роботизированный комплекс для многопереходной штамповки | 1983 |
|
SU1205972A1 |
| УСТАНОВКА ДЛЯ ЗАГРУЗКИ КОНВЕЙЕРНОГО СУШИЛА | 1966 |
|
SU184684A1 |
| Транспортное средство | 1990 |
|
SU1735163A1 |
| Привод шаговых перемещений | 1990 |
|
SU1778048A1 |
| Накопитель деталей | 1986 |
|
SU1389984A1 |
3 I
1
i .
а 1зз -г:-2г.-гг,-:2; |Ш1 йЙ-Ш4| J ГПг-I Г| - Г Г;:аЙ
-1 ||-- -|--.,|:г)1 J р : ji- S- ii- f;F--- T---.-3---- / ЁЕЕЗВВЯШШНШВЙ В nir ---.-- --- .- .- Г ir ..-.,.- -.|,1- - - -
