Известны двухотсчетные системы программной настройки деревообрабатывающих станков, включающие канал глубокого отсчета, содержащий винтовой датчик положения, контактную щетку, блок задания величины перемещения рабочего органа, счетную схему, магнитные пускатели, управляющие реверсивным двигателем механизма перемещения рабочего органа станка, и канал точного отсчета для смещения характеристики винтового датчика положения канала глубокого отсчета.
В предлагаемой системе, в отличие от известных, с целью предотвращения влияния нелинейности характеристики винтового датчика положения и инерционности аппаратуры и механизма перемещения рабочего органа, канал точного отсчета системы выполнен с кинематически связанным с винтовым датчиком положения дифференциальным сельсином-приемником и сельсинами-датчиками смещения характеристики винтового датчика положения и направления перемещения рабочего органа станка. При этом на роторе сельсина-датчика направления перемещения рабочего органа установлен рычаг, взаимодействующий с контактными парами, каждая из которых включена в цепь соответствующего магнитного пускателя реверсивного двигателя перемещения рабочего органа станка.
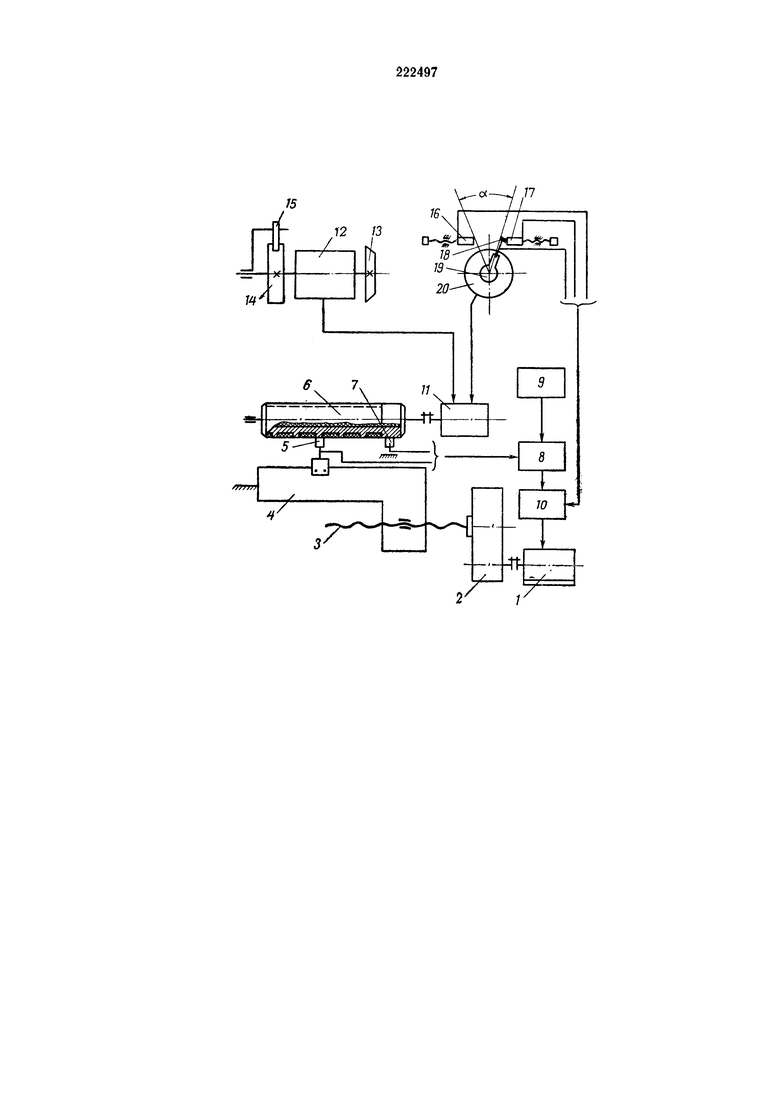
На чертеже представлена блок-схема предлагаемой системы. Система имеет два канала грубой и точной настройки. Канал грубой настройки построен на принципе счета импульсов, поступающих с датчика положения каждый раз при перемещении рабочего органа на величину, соответствующую интервалу дискретности датчика. Канал точной настройки построен на следящей сельсиновой передаче и предназначен для смещения шкалы датчика положения в пределах интервала его дискретности. По каналу грубой настройки величина настроечного перемещения задается в единицах шкалы датчика, а по каналу точной настройки - в абсолютном отсчете координаты по данному разряду.
Двигатель 1 через редуктор 2 перемещает ходовой винт 3 и рабочий орган 4. Щетка 5 скользит по винту 6. Шаг винта равен интервалу дискретности шкалы датчика. Межвитковое пространство заполнено изоляционным материалом. На винт 6 со щетки 7 подают напряжение. При перемещении рабочего органа щетка 5, попадая на гребни витков винта 6, замыкает цепь и в счетчик импульсов 8 поступает импульс тока. При совпадении количества импульсов, снятых со щетки 5 и заданных на блоке задания программы 9, поступает команда на отключение двигателя. Аппаратура блока 10 управления отключает подачу энергии в двигатель 3. Двигатель и рабочий орган останавливаются.
Чтобы получить более высокую разрешающую способность системы, использован канал точной настройки, который смещает шкалу датчика путем поворота винта 6. Тем самым смещается точка замыкания щетки 5 с гребнями витков винта 6 вдоль направления движения рабочего органа.
Поворот винта 6 осуществляет дифференциальный сельсин-приемник 11 на угол, задаваемый сельсином-датчиком 12.
Отсчет угла, который является программой по каналу точной настройки, ведется по лимбу 13. Ротор сельсина-датчика при задании программы поворачивают только в одну сторону, чтобы исключить влияния зоны нечувствительности сельсинной передачи на точность отработки программы.
Предотвращение поворота ротора сельсина-датчика 12 в другую сторону осуществляет храповик 14 с упорной плоской пружиной 15, жестко закрепленной в корпусе задающего устройства.
Направление перемещения рабочего органа задают замыканием контакта на соответствующий регулируемый контакт 16 или 17. Контакт 18 установлен на поводке 19, закрепленном на оси сельсина 20.
Одновременно с заданием направления перемещения поворачивается и ротор сельсина 20, с которого снимают рассогласование, поступающее с сельсина-датчика 12. Этим корректируют величину угла поворота винта 6 в соответствии с заданным направлением настроечного перемещения рабочего органа.
Величину угла α поворота ротора корректирующего сельсина 20 определяют опытным путем, в зависимости от зоны нечувствительности датчика положения и инерционности аппаратуры управления, механизма перемещения и рабочего органа. Настройку корректирующего устройства производят перемещением контактов 16 или 17. Постоянная величина корректирующего сигнала позволяет компенсировать влияние зоны нечувствительности датчика положения и инерционности управляющей аппаратуры и механизма перемещения. Это облегчает выполнение измерительной части системы простыми средствами с высокой прочностью. Усилия перемещения рабочих органов деревообрабатывающих станков практически постоянны во всем диапазоне перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1972 |
|
SU447681A1 |
| Устройство для управления перемещением рабочих органов станка | 1976 |
|
SU593189A1 |
| КО-ЭЛЕКТРОННОЕ АВТОКОЛЛИМАЦИОННОЕ УСТРОЙСТВО | 1969 |
|
SU243881A1 |
| Способ настройки двухканальных систем передачи угла | 1974 |
|
SU610147A1 |
| Устройство для задания угла в системах автоматического управления | 1972 |
|
SU451984A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1979 |
|
SU924736A1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОТСЧЕТА ПЕРЕМЕЩЕНИЙ | 1972 |
|
SU358103A1 |
| Следящая система | 1978 |
|
SU744435A1 |
| Устройство для автоматического позиционирования рабочего органа | 1979 |
|
SU931385A1 |
| Форматный станок для раскроя щитов | 1960 |
|
SU144277A1 |
Двухотсчетная система программной настройки деревообрабатывающих станков, имеющая канал грубого отсчета, содержащий винтовой датчик положения, контактную щетку, блок задания величины перемещения рабочего органа, счетную схему, магнитные пускатели, управляющие реверсивным двигателем механизма перемещения рабочего органа станка, и канал точного отсчета для смещения характеристики винтового датчика положения канала грубого отсчета, отличающаяся тем, что, с целью предотвращения влияния нелинейности характеристики винтового датчика положения и инерционности аппаратуры и механизма перемещения рабочего органа, канал точного отсчета системы выполнен с кинематически связанным с винтовым датчиком положения дифференциальным сельсином-приемником и электрически связанными с последним сельсинами-датчиками задания величины смещения характеристики винтового датчика положения и направления перемещения рабочего органа станка, причем на роторе сельсина-датчика направления перемещения рабочего органа установлен рычаг, взаимодействующий с контактными парами, каждая из которых включена в цепь соответствующего магнитного пускателя реверсивного двигателя перемещения рабочего органа станка.
