Известный ходовой механизм для передвижения гарных машин, например, роторных экскаваторов, включающий раму, опоры, лыжи, вертикальный и горизонтальный силовые цилиндры, не обеспечивает параллельного движения корпуса экскаватора относительно грунта.
Предлагаемый ходовой механизм позволяет улучшить маневренность экскаватора и обеспечить параллельное движение корпуса экскаватора относительно грунта.
Достигается это тем, что каждая опора экскаватора выполнена с гидродомкратом, шарнирно соединенным с тележкой, опорные колеса которой установлены с возможностью перемещения посредством силового цилиндра по направляющим лыжи. Лыжа, в свою очередь, смонтирована с возможностью поворота вокруг вертикальной оси опоры при помощи механизма поворота.
При этом, механизм поворота лыжи может быть выполнен с тягами, нижние концы которых шарнирно закреплены на крестовине, выполненной в виде кольца с цапфами.
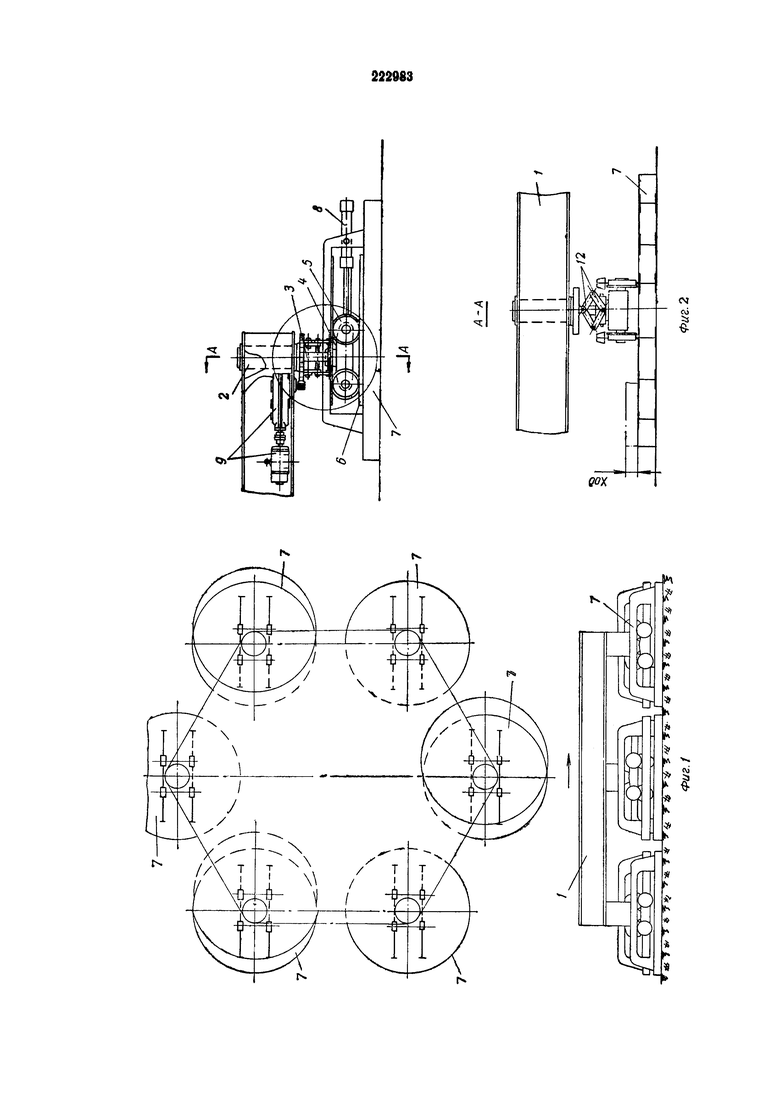
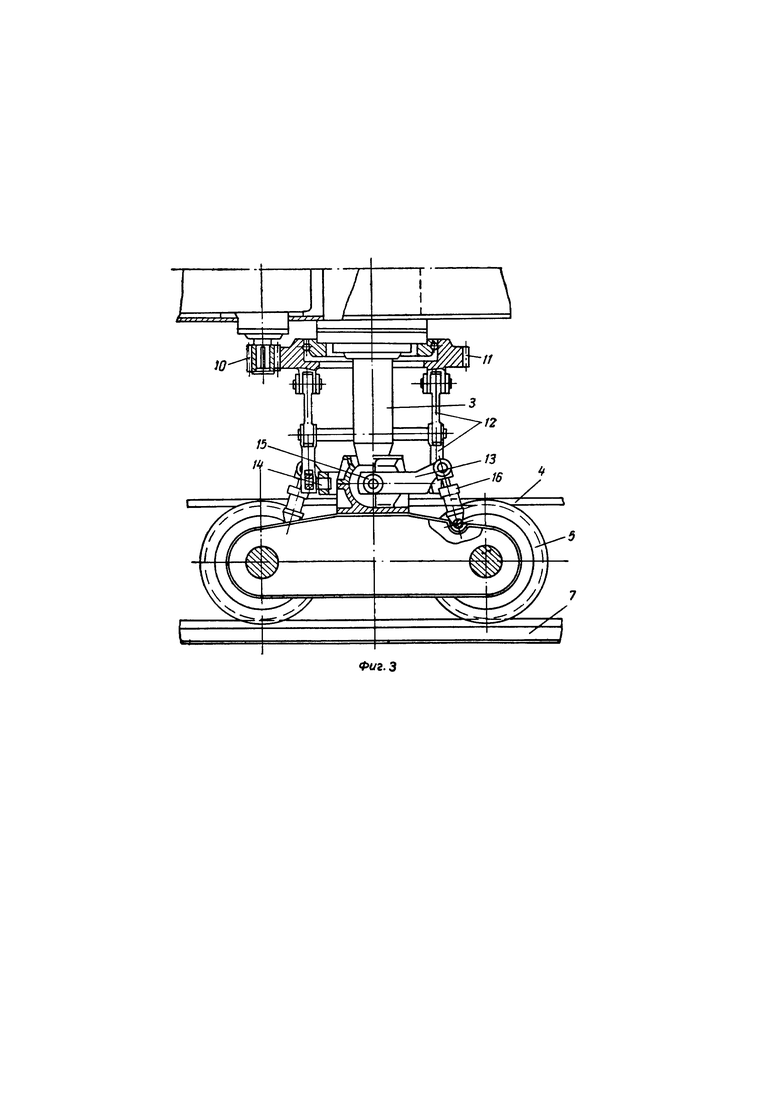
На фиг. 1 изображен предлагаемый ходовой механизм в двух проекциях; на фиг. 2 - опора экскаватора и разрез по А-А; на фиг. 3 - узел крепления тележки.
Ходовой механизм представляет собой набор отдельных опор, оборудованных лыжами и индивидуальными механизмами подъема, передвижения, поворота и стабилизации, объединенных функционально в две группы таким образом, что при движении экскаватора с опорой на одну группу лыж, другая группа оторвана от грунта и подготовлена для следующего шага.
К раме 1 экскаватора укреплены опоры 2, каждая из которых выполнена с гидродомкратом 3, шарнирно соединенным с тележкой 4. Опорные колеса 5 тележки 4 установлены на направляющие 6 лыжи 7. Тележка перемещается посредством силового цилиндра 8. Поворот лыжи 7 вокруг вертикальной оси опоры 2 осуществляет механизм поворота, включающий привод 9 (например электродвигателя с редуктором), передаточный механизм, состоящий из шестерен 10 и 11 и тяг 12, связывающих крестовину, выполненную в виде кольца 13 с цапфами 14 и 15 с шестерней 11.
Для удержания лыжи 7 в горизонтальном положении при отрыве ее от грунта она снабжена стабилизирующим механизмом, состоящим из нескольких, например четырех, вертикальных силовых цилиндров 16, соединяющих опорную тележку с кольцом 13.
Стабилизирующий механизм работает следующим образом.
Когда опорная тележка 4 расположена в одном из крайних положений, лыжа 7 при отрыве от грунта стремится наклониться. Наклону лыжи препятствуют силовые цилиндры, передающие неуравновешенный момент лыжи 7 через кольцо 13, тяги 12 и передаточный механизм раме 1. Таким образом лыжи сохраняют горизонтальное положение. При установке лыжи на наклонную поверхность грунта, вращательный момент, возникающий под действием веса машины, вызывает усилия в цилиндрах 16, значительно превосходящие их сопротивление, вследствие чего последние не препятствуют самоустановлению лыжи.
Ходовой механизм работает по следующей схеме.
При опоре на одну группу лыж происходит перемещение экскаватора по направляющим 6 на шаг. Вторая группа лыж в это время с помощью гидродомкратов 3 оторвана от грунта, выдвинута вперед по ходу движения с помощью тележки 4 и силового цилиндра 8. После ориентации в нужном направлении с помощью механизма поворота вторую группу лыж опускают на грунт к концу хода машины по первой группе лыж.
Предлагаемый ходовой механизм позволяет совершать разворот экскаватора на месте. Для этого с помощью механизма поворота лыжи 7 устанавливают так, чтобы оси направляющих 6 расположились касательно к окружности, проведенной через точки закрепления лыж к экскаватору.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающий ходовой механизм | 1981 |
|
SU1032124A1 |
| Ходовой механизм тяжелых машин | 1982 |
|
SU1046391A1 |
| ХОДОВОЙ МЕХАНИЗМ ТЯЖЕЛЫХ МАШИН | 1967 |
|
SU222982A1 |
| Шагающий ходовой механизм для шнекобуровых машин | 1976 |
|
SU614216A1 |
| ХОДОВОЙ МЕХАНИЗМ ТЯЖЕЛЫХ МАШИН ТИПА РОТОРНОГО ЭКСКАВ.ЛТОРА | 1969 |
|
SU257363A1 |
| МЕХАНОГИДРАВЛИЧЕСКИЙ КОМБАЙН | 2003 |
|
RU2244826C1 |
| Опорно-ходовая часть тяжелых машин | 1983 |
|
SU1129298A1 |
| Ходовое оборудование тяжелых машин | 1978 |
|
SU981522A1 |
| Шагающее ходовое оборудование | 1983 |
|
SU1142605A1 |
| Механизм шагания экскаватора | 1982 |
|
SU1086087A1 |
1. Ходовой механизм тяжелых машин, например, роторного экскаватора, включающий раму, опоры, лыжи, вертикальный и горизонтальный силовые цилиндры, отличающийся тем, что, с целью обеспечения параллельного движения корпуса экскаватора относительно грунта, а также улучшения его маневренности, каждая опора последнего выполнена с гидродомкратом, шарнирно соединенным с тележкой, опорные колеса которой установлены с возможностью перемещения посредством силового цилиндра по направляющим лыжи, смонтированной, в свою очередь, с возможностью поворота вокруг вертикальной оси опоры при помощи механизма поворота.
2. Механизм по п. 1, отличающийся тем, что механизм поворота лыжи выполнен с тягами, нижние концы которых шарнирно закреплены на крестовине, выполненной в виде кольца с цапфами.
