Известны винтовые передачи для цепи подач, например металлорежущих станков, содержащие ходовой винт, разъемную гайку, охватывающую винт при зацеплении, и устройство для определения соответствия винтовых нарезок винта и гайки, выполненное в виде зубчатого колеса, взаимодействующего с винтом, и резьбоуказателя. Такое выполнение устройства для определения соответствия винтовой нарезки винта и гайки позволяет вручную осуществить замыкание разъемной гайки в момент соответствия нарезок.
Однако известные устройства не обеспечивают надежности безударного введения в зацепление гайки с винтом. Кроме того, замыкание гайки осуществляется вручную.
Описываемая передача отличается тем, что устройство для определения соответствия винтовых нарезок винта и гайки выполнено в виде двух связанных соответственно с винтом и гайкой кинематических цепей, последние элементы которых - зубчатые колеса - установлены соосно, выполнены из диэлектрика и имеют по наружной торцовой поверхности токопроводящие кольца и щупы. Одни концы щупов контактируют с токопроводящими кольцами, а другие выведены навстречу один другому, совпадают при соответствии нарезок винта и гайки и подают сигнал на введение в зацепление гайки с винтом.
Это отличие позволяет осуществить автоматическое безударное введение в зацепление гайки с винтом.
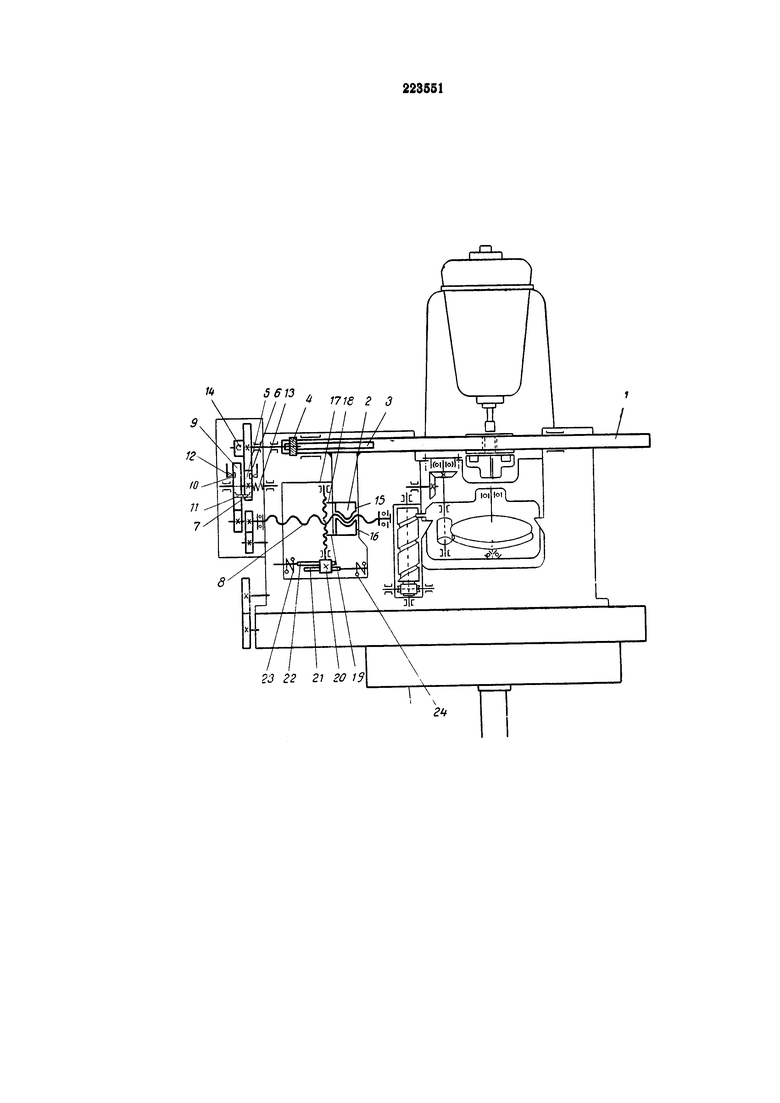
На чертеже изображена кинематическая схема описываемой передачи.
На каретке 1, например ползуне металлорежущего станка, несущей узел разъемной гайки 2, жестко установлена рейка 3. Рейка 3 при движении каретки 1 заставляет вращаться зубчатое колесо 4, которое кинематически связано с зубчатым колесом 5 из диэлектрика.
Зубчатое колесо 5 имеет установленное на торцовой поверхности токопроводящее кольцо 6 и вмонтированный в него щуп 7, один конец которого контактирует с токопроводящим кольцом 6, а другой выведен на другую торцовую поверхность колеса 5.
Винт 8, в свою очередь, кинематически связан с другим зубчатым колесом 9, выполненным, как и зубчатое колесо 5, из диэлектрика. Колесо 9 имеет на торцовой поверхности токопроводящее кольцо 10 и вмонтированный в колесо 9 щуп 11, один конец которого контактирует с кольцом 10, а другой выведен на другую торцовую поверхность колеса 9. По кольцам 6 и 10 скользят щетки 12 электроцепи.
Зубчатые колеса 5 и 9 установлены соосно, обращены друг к другу торцами, несущими щупы 7 и 11, причем одно из колес подпружинено к другому пружиной 13. Зубчатые колеса 5 и 9 с помощью регулировки и стопорного винта 14 устанавливаются так, что при соответствии винтовой нарезки винта 8 и гайки 2 щупы 7 и 11 контактируют друг с другом. Кинематические цепи выбираются так, чтобы при подаче каретки 1 вращающимся винтом 8 зубчатые колеса 5 и 9 вращались бы в одном направлении и с одинаковой скоростью, для чего выполняется следующая кинематическая зависимость:
где i1 - передаточное отношение от винта 8 к зубчатому колесу 9;
i2 - передаточное отношение от зубчатого колеса 4 к зубчатому колесу 5;
ms - торцовый модуль зубчатого колеса 5;
Zp - число зубьев колеса 5.

где S - шаг винта;
n - число заходов винта.
Полугайки 15 и 16 разъемной гайки 2 находятся в направляющих, жестко связанных с кареткой 1. Сводить и разводить полугайки 15 и 16 можно механизмом с самотормозящейся парой. По приведенной схеме это осуществляется следующим образом. В пазы винтового валика 17 входят штыри 18 и 19, жестко связанные соответственно с полугайками 15 и 16. Винтовой валик 17 вращается в ту или другую сторону, отчего соответственно разводятся или сводятся полугайки 15 и 16. Происходит это за счет шестерни 20, зацепляющейся с рейками 21 и 22, связанными с электромагнитами 23 и 24.
Устройство работает следующим образом.
Команда на перемещение каретки 1 от заданной программы воспринимается как предварительная - подается напряжение на контур электроцепи, включающей контакты щупа 11, и начинается вращение винта 8. Полугайки 15 и 16 разъемной гайки 2, в случае несоответствия положения винтовой нарезки винта и гайки, не сводятся, так как разомкнут контур упомянутой электроцепи, ибо щупы 7 и 11 при этом контактируют между собой. При дальнейшем вращении винта 8 наступает момент совпадения винтовых нарезок винта 8 и гайки 2, при этом щупы 7 и 11 замыкают контакт упомянутого контура, от чего подается исполнительная команда на сцепление разъемной гайки 2 с винтом, при данной схеме на включения электромагнитов 22 и 23.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОЛИКО-ВИНТОВОЙ МЕХАНИЗМ | 2016 |
|
RU2631096C1 |
| Самописец профилографа | 1979 |
|
SU800636A1 |
| Приспособление для автоматической установки резца в рабочее положение на станках с копирным резьбонарезным приспособлением | 1945 |
|
SU68304A1 |
| Механизированный привод самоцентрирующего кулачкового патрона | 1989 |
|
SU1636135A1 |
| Механизм подачи | 1987 |
|
SU1426745A1 |
| ЧЕРВЯЧНАЯ ПЕРЕДАЧА, СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ, ОБОРУДОВАНИЕ И ИНСТРУМЕНТ ДЛЯ ЕЁ ВЫПОЛНЕНИЯ | 1998 |
|
RU2200262C2 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| ЧЕРВЯЧНЫЙ ИНСТРУМЕНТ, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ, ОБОРУДОВАНИЕ ДЛЯ ЕГО ИЗГОТОВЛЕНИЯ И ЭКСПЛУАТАЦИИ | 1998 |
|
RU2169061C2 |
| Устройство подачи навивочного материала к станку для горячей навивки пружин | 1985 |
|
SU1299687A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОКАРНЫМ СТАНКОМ | 1940 |
|
SU63198A1 |
Винтовая передача для цепи подач, например металлорежущих станков, содержащая ходовой винт, разъемную гайку, охватывающую винт при зацеплении, и устройство для определения соответствия винтовых нарезок винта и гайки, отличающаяся тем, что, с целью автоматического безударного введения в зацепление гайки с винтом, устройство для определения соответствия винтовых нарезок винта и гайки выполнено в виде двух связанных соответственно с винтом и гайкой кинематических цепей, последние элементы которых - зубчатые колеса установлены соосно, выполнены из диэлектрика и имеют по наружной торцовой поверхности токопроводящие кольца и щупы, одни концы которых контактируют с токопроводящими кольцами, а другие выведены навстречу один другому, совпадают при соответствии нарезок винта и гайки и подают сигнал на введение в зацепление гайки с винтом.
