| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Схват манипулятора | 1983 |
|
SU1087327A1 |
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| Захватное устройство | 1986 |
|
SU1323371A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Манипулирующее устройство для съема, кантования и выдачи изделий с пресса | 1987 |
|
SU1512775A1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Зубодолбежный станок | 1987 |
|
SU1569118A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| Устройство для нанесения клея на кромки обувных деталей из мягких материалов | 1990 |
|
SU1784202A1 |
Изобретение относится к машиностроению, предназначено для захвата, кантования и перемещения детали и может быть использовано при создании различных механизмов, в частности в манипуляторах. Целью изобретения является расширение функциональных возможностей устройства за счет создания осевого перемещения детали после захвата ее и кантования. Когда ведущая зубчатая рейка 2 движется в одном направлении, то происходит поворот вала 4 за счет кинематической связи зубчатого колеса 12 с рейкой, а также сближение подпружиненных относительно станины I гаек (губок захвата) 8 и 9 вдоль разнонаправленных винтовых нарезок 6 и 7, выполненных на валу 4. В этот момент происходит зажим детали, прекращается проворот винтовых нарезок 6, 7.внутри гаек 8, 9 (губок захвата) и производится кантование зажатой детали вокруг оси вала. Затем происходит горизонтальное перемещение зажатой детали -вдоль оси вала 4 за счет кинематической связи зубчатого колеса 14 одно временно с зубьями ведущей зубчатой рейки 2, расположенными на поверхности последней, к круглой зубчатой рейкой 13, выпол.енной на свободном конце вала 4. При обратном ходе ведущей зубчатой рейки 2 происходит разжим гаек 8, 9 (губок захвата) и возврат последних в исходное положение. 2 ил. (Л с
Фаг. Г
Изобретение относится к машиностроению, предназначено для захвата, Кантования и перемещения детали и может быть использовано при создании различньпс механизмов, в частности в манипуляторах.
Целью изобретения является расширение функциональных возможностей устройства за счет создания осевого перемещения детали после захвата ее |и кантования.
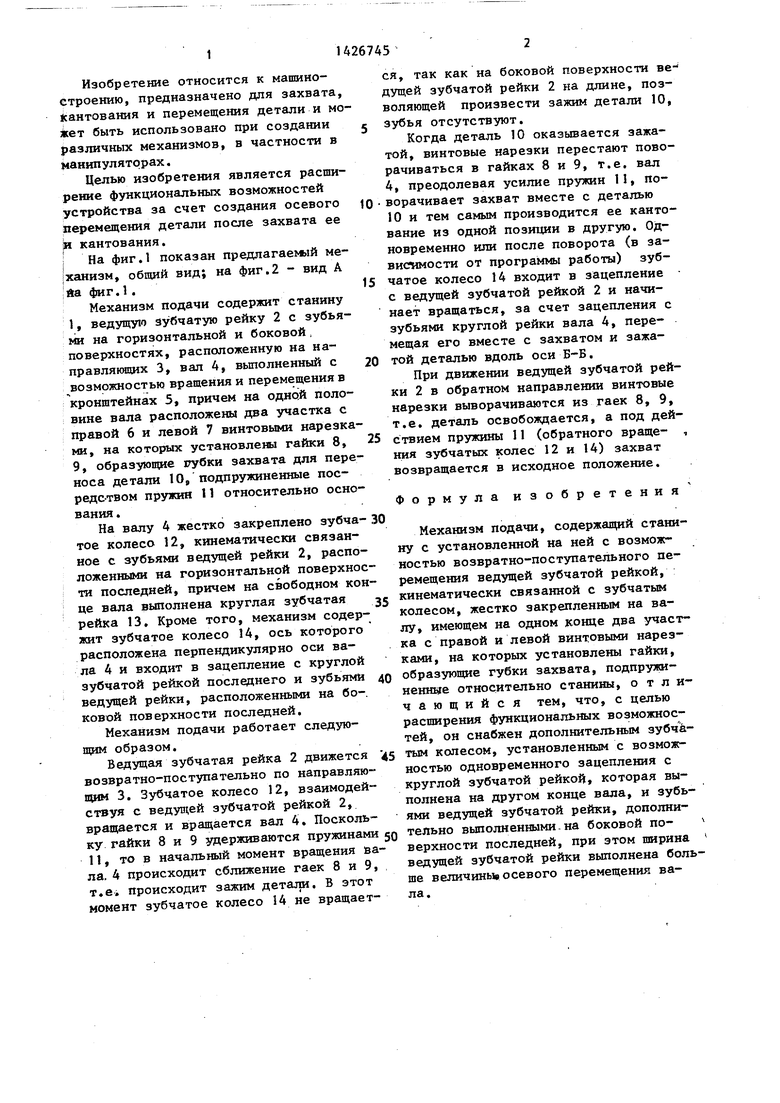
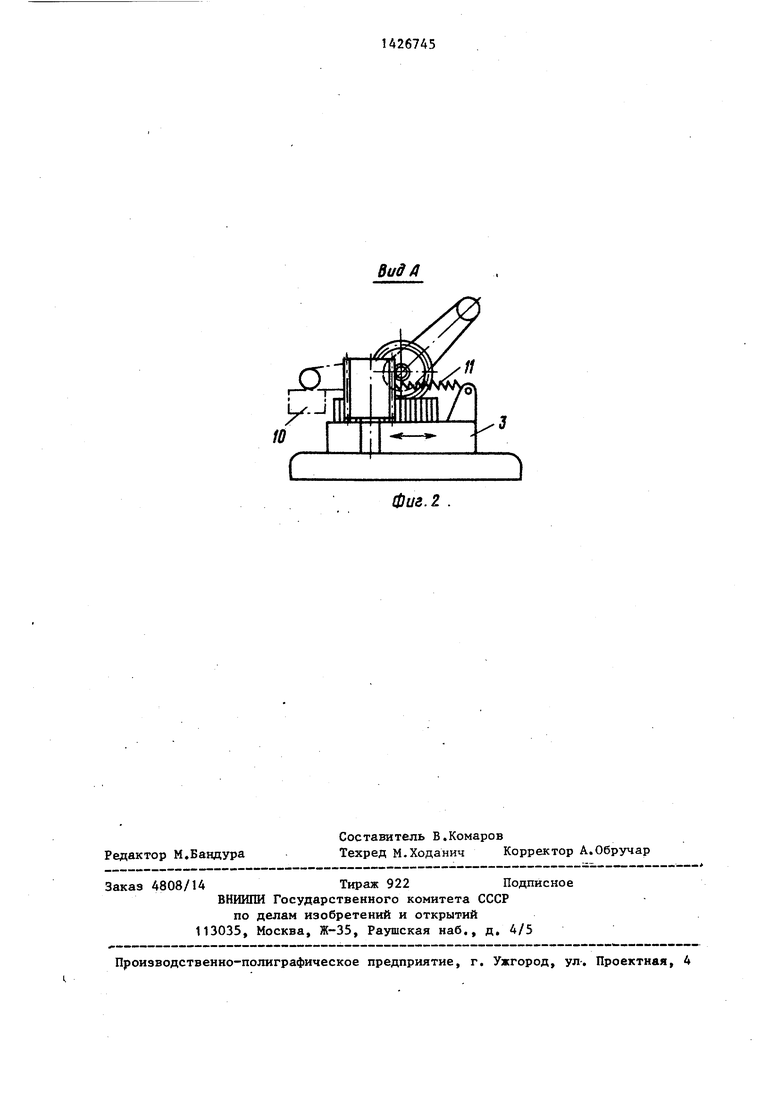
На фиг.1 показан предлагаемый ме- |ханизм, общий вид; на фиг.2 - вид А {йа фиг..
Механизм подачи содержит станину
I,ведущую зубчатую рейку 2 с зубьями на горизонтальной и боковой, поверхностях, расположенную на направляющих 3, вал 4, выполненный с возможностью вращения и перемещения в кронштейнах 5, причем на одной половине вала расположены два участка с правой 6 и левой 7 винтовыми нарезками, на которых установлена гайки 8, 9, образующие рубки захвата для переноса детали 10, подпружиненные посредством пружин 11 относительно основания.
На валу 4 жестко закреплено зубча- тое колесо 12, кинематически связанное с зубьями ведущей рейки 2, расположенными на горизонтальной поверхности последней, причем на свободном конце вала выполнена круглая зубчатая рейка 13, Кроме того, механизм содержит зубчатое колесо 14, ось которого расположена перпендикулярно оси вала 4 и входит в зацепление с круглой зубчатой рейкой последнего и зубьями ведущей рейки, расположенными на бо-. козой поверхности последней.
Механизм подачи работает следующим образом.
Ведущая зубчатая рейка 2 движется возвратно-поступательно по направляющим 3. Зубчатое колесо 12, взаимодействуя с ведущей зубчатой рейкой 2, вращается и вращается вал 4, Поскольку гайки 8 и 9 удерживаются пружинами
II,то в начальный момент вращения вала. 4 происходит сближение гаек 8 и 9, T.ei происходит зажим детали. В этот момент зубчатое колесо 14 не вращается, так как на боковой поверхности ве дущей зубчатой рейки 2 на длине, позволяющей произвести зажим детали 10, зубья отсутствуют.
Когда деталь 10 оказывается зажатой, винтовые нарезки перестают поворачиваться в гайках В и 9, т.е. вал 4, преодолевая усилие пружин II, поворачивает захват вместе с деталью 10 и тем самым производится ее кантование из одной позиции в другую. Одновременно или после поворота (в зависимости от программы работы) зубчатое колесо 14 входит в зацепление с ведущей зубчатой рейкой 2 и начинает вращаться, за счет зацепления с зубьями круглой рейки вала 4, перемещая его вместе с захватом и зажатой деталью вдоль оси Б-Б.
При движении ведущей зубчатой рейки 2 в обратном направлении винтовые нарезки выворачиваются из гаек 8, 9, т.е. деталь освобождается, а под действием пруясины 11 (обратного враще- ния зубчатых колес 12 и 14) захват возвращается в исходное положение.
Формула изобретения
Механизм подачи, содержащий станину с установленной на ней с возможностью возвратно-поступательного перемещения ведущей зубчатой рейкой, кинематически связанной с зубчатым колесом, жестко закрепленным на валу, имеющем на одном конце два участка с правой и левой винтовыми нарезками, на которых установлены гайки, образующие губки захвата, подпружи- нешзде относительно станины, отличающийся тем, что, с целью расширения функциональных возможностей, он снабжен дополнительным зубчЬ- тым колесом, установленным с возможностью одновременного зацепления с круглой зубчатой рейкой, которая выполнена на другом конце вала, и зубьями ведущей зубчатой рейки, дополнительно выполненными.на боковой по- верхности последней, при зтом ширина ведущей зубчатой рейки выполнена больше величины осевого перемещения вала.
oj
ВидД
Фиг.2 .
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| М.: Наука, .1973, т.З, С.94. |
