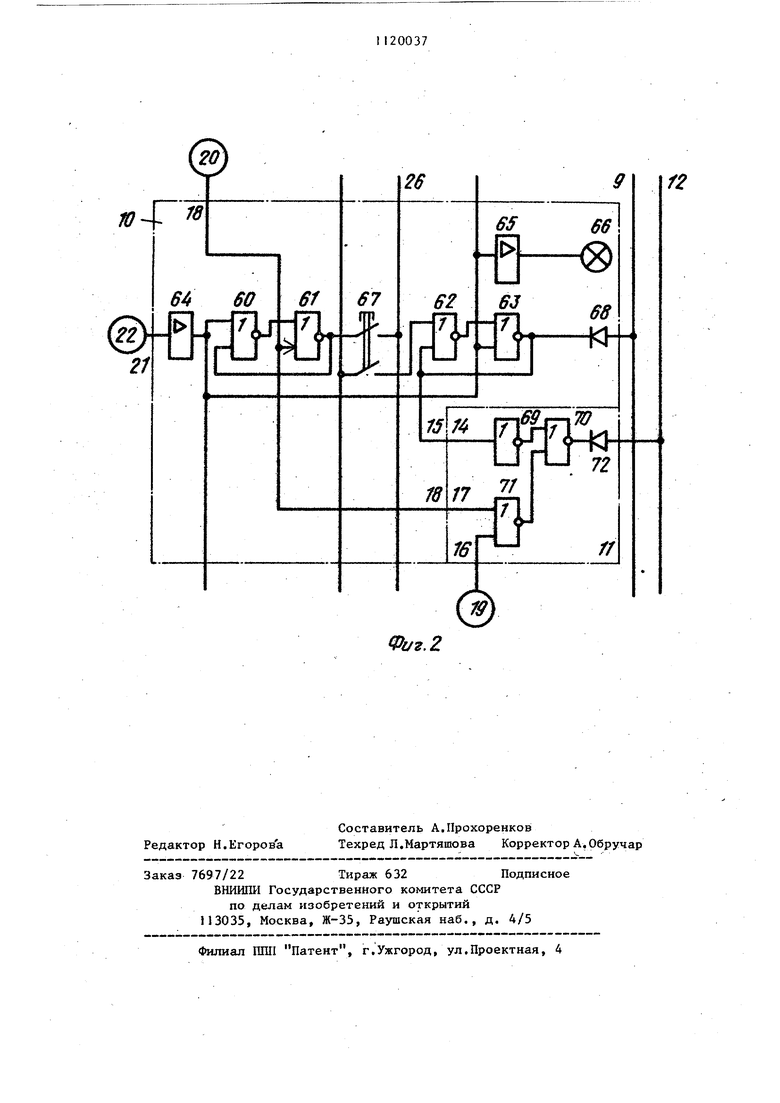
Изобретение относится к автоматизации производственных процессов может быть использовано в линиях гальванической обработки деталей, печатных плат и т.п. По основному авт.св. № 261085 устройство для управления полуавто матическими линиями обработки детал в жидкостях, содержащее механизмы для горизонтального и вертикального перемещения траверсы автооператора с деталями, адрес1ше блоки, набирае мие к количестве, соответствующем количеству нeoбxoди в x остановок (позиций), которые своими входами связаны с позиционными датщ1ками, а выходами с блоками горизонтального и вертикального перемещения, причем выбор позиции осуществляется через кйопку адресования С О Недостатком известного устройства является низкая точность останова автооператора на заданной позиции вследствие его большой скорос ти перемещения. Цель изобретения - повышение точ ности управления. Цель достигается тем,что устройст для управления полуавтоматическим линиями обработки деталей в жидкостях снабжено блоком формирования команд снижения скорости привода ме ханизма горизонтального перемещения блоками совпадения по числу позиций, один вход каждого из которых соединен с выходом соответствующего адресного блока, другой вход и запрещающий вход адресного блока с позиционамм датчиком предыдущей позиции, третий - с позищ1онш 1м дат чиком последующей позиции, а выход каждого блока совпадения соединен с одним из входов блока формирования команд скорости .снижения, связанного другим входом с выходами блоков адресования. Блок формирования команд снижения скорости привода механизма го.ризонтального перемещения содержит элемент памяти, единичный вход кото рого является первым входом блока, а нулевой вход - вторымвходом блока, и подключенный входом к его вых ду преобразователь, выход которого яЪляе тся выходом блока. Влок совпадения содержит элемент НЕ, вход которого является первым ВУ.ОДОЫ блока, один элемент ИЖ-НЕ, входа которого являются вторым и третьим входами блока совпадения, другой элемент ИЛИ-НЕ, подключенный входами к выходам элемента НЕ и первого элемента ИЛИ-НЕ, а выходом через разделительный диод - к выходу блока совпадения. На фиг.1 изображены функциональные схемы блока формирования команд снижения скрости привода механизма горизонтального перемещения, блока горнзонтального перемещения и блока вертикального перемещения} на фиг.1 функционалыше схемы адресного блока и блока совпадения устройства для управления полуавтоматическими линиями обработки деталей в жидкостях. Устройство для управления полуавтоматическими линиями обработки деталей в жидкостях содержит блок 1 формирования команд снижения скорости привода механизма горизонтального перемещения, блок 2 горизонтального перемещения, блок 3 верикального перемещения, подключенные к их входам 4-7 через усилитель 8 выходают 9 адресные блоки 10, число которых равно числу адресных позиций , линии обработки деталей в жидкостях, и такое же количество блоков I1 совпадения, соединенных выходами 12 со входами 13 блоков 1 фор1в1рования кома.нд Ч:нижения скорости привода механизма горизонтального перемещения. Вход 14 каждого блока И совпадения соединен с выходом соответствующего адресного блока Ш, вход 16 и вход 17 совместно с входом 18 адресного блока Ю подключены соответственно к позиционным датчикам 19 и .20 последующей и предыдущей адресных позиций. Вход 21 адресного блока 10 соединен с позиционным датчиком 22 соотг ветствующей адресной позиции. Выход 23 блока 3 вертикального перемещения подключен к входу 24 блока 2 горизонтального перемещения, вход 25 которого соеданен с выходами 26 адресных блоков 10. Блок 1 формирования команд снижения скорости привода - механизма: горизонтального перемещения содержит узел Память, выполненный на элементах 1ШИ-НЕ 27 и 28, подклюенный выходом через усилитель 29 к пускателю 30 электродвигателя. диничш 1й вход узла Память соеинен с входом 13 блокад а нулевой - с входом 4, Елок 2 горизонтального перемещения содержит узел Память, выполненный на элементах ИЛИ-НЕ 31 и 32, элемент НЕ. 33, элемент 34 Задержка времени, элементы ИЛИ-НЕ 35 и 36, усилители 37 и 38, пускатели 39 и 40 Перемещение вправо и Перемещения влево соответственно. Единичный вход узла Память под ключен к входу 25 блока, а нулевой совместно с входом элемента 34 соединен с входом 5. Выход узла Память соединен с I одним из входов элемента ИЛИ-НЕ 36, а через элемент НЕ 33 - с одним из входов элемента ИЛИ-НЕ 35, другие входы которых соединены с выходом элемента 34 Задержка времени, а третьи - с входом 24 блока 2. Блок 3 вертикального перемещения содержит кнопки 41 и 42 управления, узлы Памяти, вшпол1 ннь е на элементах ИЛИ-НЕ 43 - 46, элемент ШШ-НЕ 47, усилители 48 - 53, сигнальные Лампы 54 и 55, пускатели 56 и 67 Перемещение вниз и Перемещение вверх, датчик 58 верхнего положения и датчик 59 нижнего полож ния. : Входа 6 и 7 блока 3 череэ замакающиё контактыгкнопок 41 и 42 управления соединены с единичными :входами узлов Память, выходы которых через усилители 48 и 51 подкл чены к пускателям 56 и 57. Датчики 58 и 59 через усилители 49 и 52 сое динены с нулевыми входами узлов Па мять и с входами элемента ИЛИ-НЕ 4 Iподключенного выходом к выходу 23 бл ка 3, а через усилители 50 и 53 с сигнальными лампа1 в1 54 и 55. Адреснь{й блок О содержит узлы П №1ять, выполненные на элементах . ИЛИ-НЕ 60 - 63, усилителях 64 и 65, сигнальной лампе 66,кнопке 67 упра ления и разделительном диоде 68. Вход 21 адресного блока 10 через усилитель 64 соединен с единичным в дом узла Память на элементах ИЛИНЕ 60 и 61 и с нулевым входом узла Намять на элементах ШШ-НЕ 62 и 63, а через услитель 65 с сигналь ной лампой 66. Выход первого узла Память через один из замыкающих контактов кнопки 67 управления соединён с вых дом 26 блока, выход второго узла Память - с выходом 15 блока и через разделительный диод 68 - с выхо дом 9 блока. Нулевой вход первого узла Память соединен с входом 18 блока. Единичный вход второго узла Память через другой замыкающий контакт кнопки 67 управления подключен к источу Нику питания (на чертеже не показан). Блок 1} совпадения выполнен на элементе НЕ 69, элементах.КЛИ-НЕ 70 и 7I и разделительном диоде 72. , Входы элементов 69 и 71 соединены соответственно с входами 14, 16 и 17 блока, а выходы подключены к входам элемента ИЛИ-НЕ 70, соединенного выходом через разделительный диод 72 с выходом 12 блока. Устройство работает следующим образом. При нажатиии на кнопку 67, определяющую задаваемую позицию, возбуждается узел Память на элементах 62 и 63, ,в результате чего исчезают при появлении сигнала на выходе 9 блока 10 сигна н 1 на входах 4-7 блоков 1-3. Горизонтальные перемещения осуществляются если траверса автооператора находится в верхнем или нижнем положении. При этом датчик 58 верхнего или датчик 59 нижнего положения вьщает сигнал через усилитель 49 или 52. Загорается сигнальная лампа 54 или 55, и с выхода элемента 47 на входы элементов 35 и 36 не поступают запрещающие сигналы. При отсутствии сигнала позиционного датчика 22 заданной позиции адресоваиия на выходе 26 блока при нажатии кнопки 67 сигнал не появляется. Узел памяти на элементах 31 и 32 не возбуждается и с его выхода на входа элементов 33 и 36 сигналы не поступают. При этом с выхода элемента 33 на 9дин из входов элемента 35 поступает сигнал, в результате которого на выходе сигнал исчезает. А элемент 36 своими выходными сигнала|« через усилитель 38 включает пускатель, и автооператор перемещается,ц например влево, с маршевой скростью. Когда срабатывает позиционный датчик 20 позиции .адресования, ближайшей к заданной, на входах 7 и 18 блоков 10 и II появляется сигнал, поступающий на вход элемента 71, и с выхода элемента 70 - на выход 12 и вход 13 блока 1. Узел памяти на элементах 27 и 28 устанавливается в единичное состояние и включает пускатель 30.
Автооператор на медленной скорости приближается к заданной позиции. Когда автооператор придет на заданную позицию, соответствующую нажатой кнопке, позиционный датчик 22 устанавливает узел памяти на элементах 62 и 63 в нулевое состояние. Сигнал на выходе 9 блока 10 исчезает. Одновременно загорится сигнальная лампа 66. Узел памяти на злементах 27 и 28 устанавливаетс-я в нулевое состояние. Автооператор останавливается.
При нажатии на кнопку 67, соотвествующую пройденной автооператором позиции, устройство работает аналогично, за исключением того, что с выхода узла памяти на элементах 60 и 61 сигнал поступает через кнопку 67, выход 26 и вход 25 на вход узла памяти на элементах 31 и 32. с выхода элемента 32 на входы элементов 33 и 36 поступают сигналы, и на входе элемента 35 пропадает сигнал, поступивший ранее с выхода элемента 33. Через выдержку времени необходимую для исключения возможных ошибок при определении направления движения в момент переключения, исчезает сигнал на выходе элемента 34, и появлякйцнйся на выходе элемента 35 сигнал через усилитель 37 включает пускатель 39. При этом автооператор движется с маршевой
скростью вправо и информация в узлах памяти на- элементах 60 и 61 адресных блоков 10 пройденных позиций стирается. Когда сработает позиционный датчик 19 адреса, ближайшего по ходу движения к заданному, на вход элемента 71 блока совпадения поступает сигнал. При этом с выхода элемента 70 подается сигнал на выход 12 блока 10 и вход 13 блока I, Узел памяти на элементах 27 и 28 устанавливается в единичное состояние и включает пускатель 30. Автооператор переходит на медленную скорость и останавливается, как описано вьш1е, при достижении заданной позиции.
Движение .вверх или вниз производится нажатием кнопки 41 или 42. При этом сигнал поступает на вход узла памяти на элементах 45 и 46 или 43 и 44 которые включают пускатель 56 или 57.
При достижении траверсой автооператора верхнего или нижнего положения соответствующей датчик 58 или 59 выдает сигналы на соответствующую сигнальную лампу 54 или 55, вход узла памяти на элементах 45, 46 или 43, 44 и на один из входов элемента 47.
Использование изобретения позволяет повысить производительность линии за счет повышения скорости транспортирования и улучшить условия эксплуатации механизмов.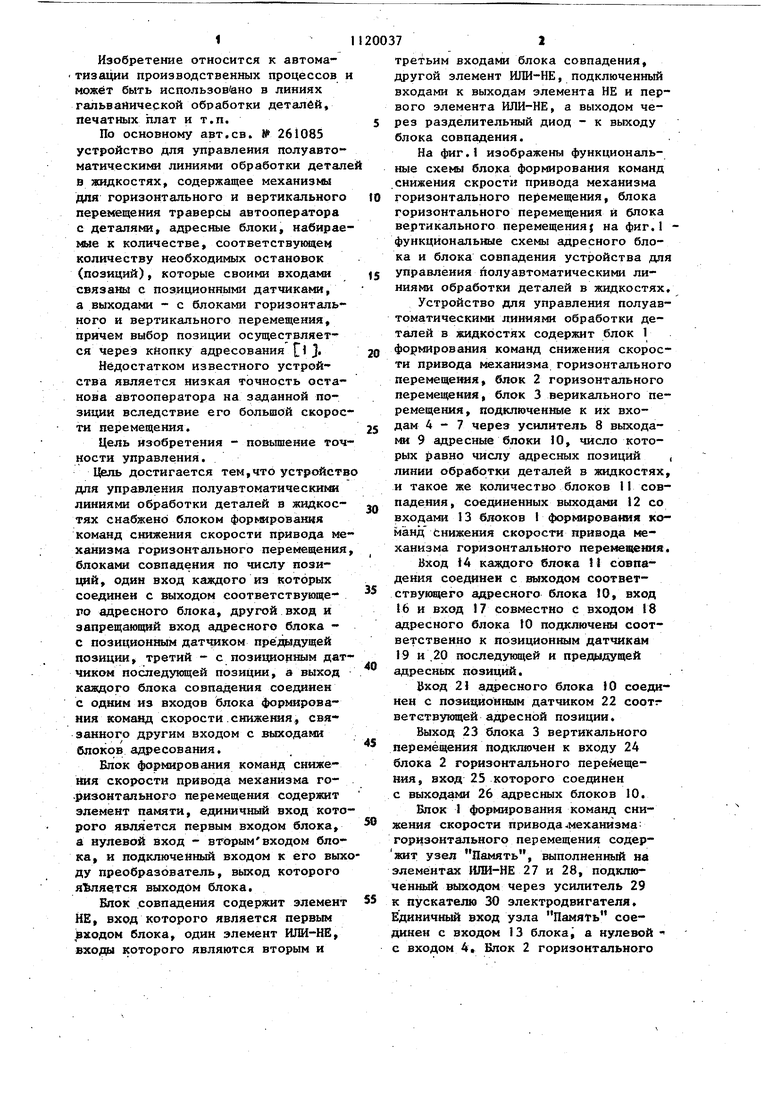
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПОЛУАВТОМАТИЧЕСКИМИ ЛИНИЯМИ ОБРАБОТКИ ДЕТАЛЕЙ В ЖИДКОСТЯХ | 1970 |
|
SU261085A1 |
| Устройство для управления автооператором полуавтоматической линии гальванопокрытий | 1984 |
|
SU1236015A1 |
| Устройство для управления автоматическими линиями гальванопокрытий | 1983 |
|
SU1095136A1 |
| Устройство для управления транспортными средствами | 1977 |
|
SU690500A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМИ ЛИНИЯМИ ОБРАБОТКИ ДЕТАЛЕЙ | 1965 |
|
SU224888A1 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| Система управления устройством для маркирования | 1983 |
|
SU1163936A1 |
| Устройство для адресования транспортного средства с электроприводом | 1983 |
|
SU1184767A1 |
| Устройство для управления координатным транспортным средством | 1990 |
|
SU1718234A1 |
| Устройство для управления автоматическими линиями | 1990 |
|
SU1805448A1 |
1..УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛУАВТОМАТИЧЕСКИМИ ЛИНИЯШ ОБРАБОТКИ ДЕТАЛЕЙ В ЖИДКОСТЯХ, по авт.св. № 261085, отличающееся тем, что, с целью повышения точности :управления;, оно снабжено блоком формирования команд снижения скорости привода механизма горизонтального перемещения, блоками совпадения по числу позиций, один вход каждого из которых соединен с выходом соответствующего адресного блока, другой вход и запрещакщий вход адресного блока с позиционным датчиком предыдущей позиции, третий - с позиционным датчиком последующей позиции, а выход каждого блока совпадения соединен с одним из входов блока формирования команд снижения скорости, связанного другим входом с вых.оцами блоков адресования. 2.Устройство по п.1 о т л и чающееся тем, что блок формирования кома1Зд снижения скорости привода механизма горизонтального перемещения содержит злемент памяти,, единичный вход которого является первым входом блока, а нулевой вход - BTojMiiM входом блока, и подключенным входом к его Ьыходу преобразователь, выход которого является выходом блока. 3.Устройство по П.1, о т л и чающееся тем, что блок совпадения содержит элемент НЕ, вход которого является первшм входом блока, один злемент , входы которого являются вторым и третьим входами блока совпадения, другой злемент ШШ-НЕ, подключенньй входами к выходам элемента НЕ и первого элемента ШШ-НЕ, а выходом через разделительный диод - к выходу блока совпадения.
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПОЛУАВТОМАТИЧЕСКИМИ ЛИНИЯМИ ОБРАБОТКИ ДЕТАЛЕЙ В ЖИДКОСТЯХ | 0 |
|
SU261085A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
