Р1звестны автооператоры для гальванохимических автоматов, имеющие привод вертикального и горизонтального движения подвесок и мехаиизм фиксации.
Предложенный автооператор отличается от известного тем, что он снабжен мехапиз},1ол поперечного движения нодвесок, выполпепным в виде каретки с захватами.
Это позволяет повысить точность обработки и Производительность труда.
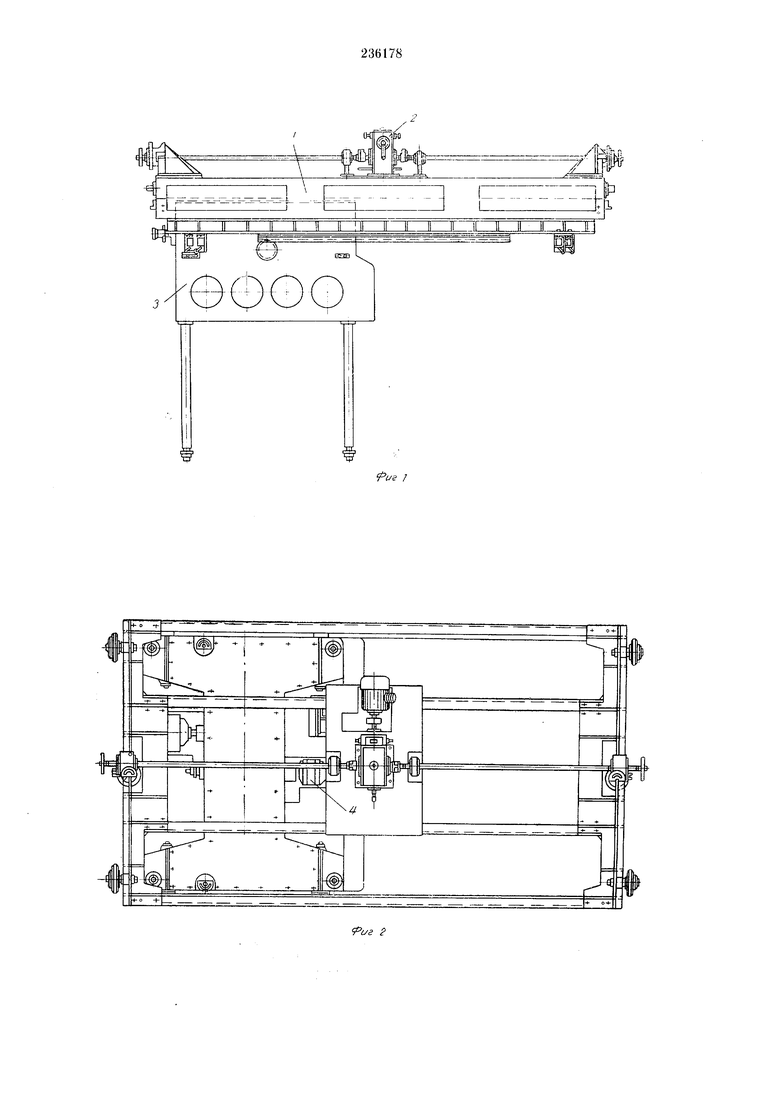
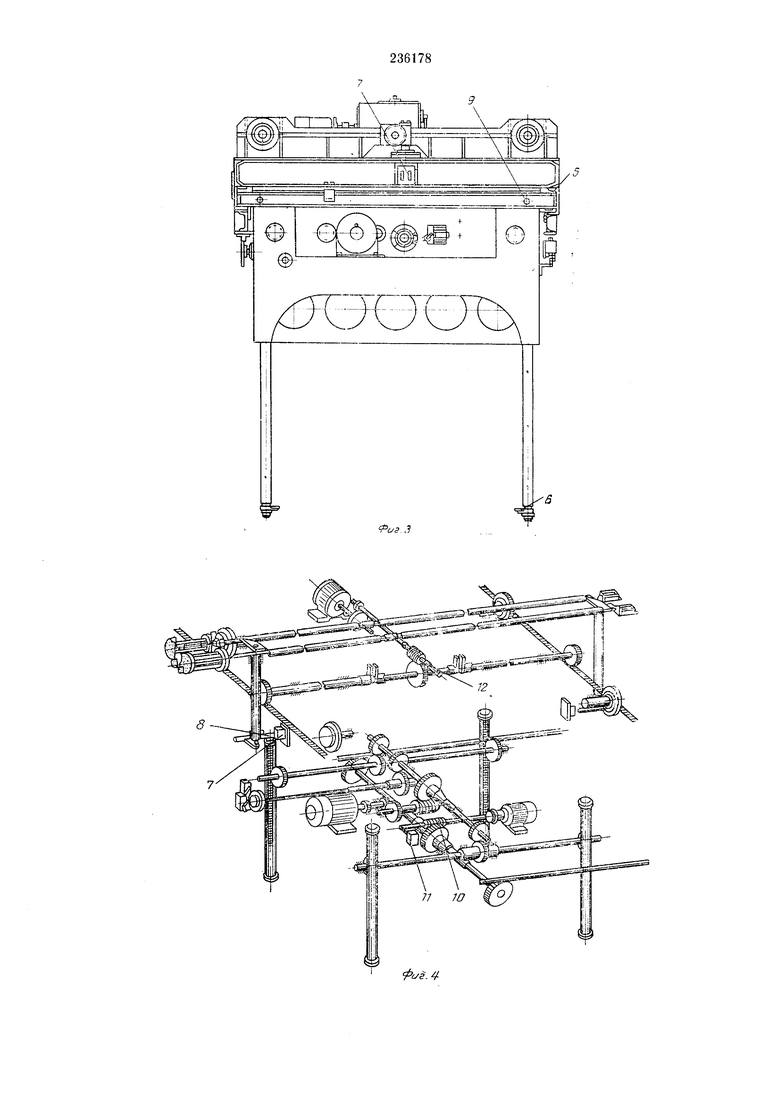
На фиг. 1-3 изображено онисываемое устройство в трех проекциях; на фиг. 4 - кинематическая схема.
Автооператор содержит продольно перемещающийся мост 1 с приводом 2 перемещения, поперечно перемещающуюся каретку 3 с приводом 4, перемещающим ее по направляющим моста 5 с захватами 6. С обоих торцов моста / установлены гнезда 7 для штырей фиксаторов 8, с левого торца моста предусмотрены жесткие упоры 9 точной остановки каретки.
Привод 4 поперечпого перемещения каретки 3 снабжен подпружинепным в осевом направлении червяком 10, воздействующим при осевом иеремещепии на конечный выключатель JL Для обеснечения фиксации моста в приводе его предусмотрены компенсационные пружины 12.
направляется к ванне, из которой необходимо извлечь обрабатываемые детали. Привод 2 выключается, и автооператор останавливается.
Включается механизм фиксации, щтыри фиксаторов входят в гнезда, смещая мост в ту или иную сторону за счет нружин 12 привода 2. Затем включается привод 4, и с по-мощью червячной передачи и системы мехапических передач начинается поперечное перемещение каретки 3 по мосту / в крайнее левое положепие, где установлены жесткие уиоры. Каретка, наткнувщись на жесткий упор, останавливается, и червяк, продолжая вращаться, нажимает на конечный выключатель. В результате этого останавливается прпвод 4, и начинается подъем захватов с подвесками. После подъема вновь включается каретка, и иодвески перемещаются в крайнее правое положение.
Предмет изобретения
Автоонератор для гальванохимических автоматов, имеющий прпвод вертикального и горизонтального движения подвесок и механизм фиксации, от.тчающиися тем, что, с целью иовыщения точности обработки и производительностн труда, оп снабжен механизмом поперечного движения подвесок, выполненным в виде каретки с захватами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для гальванохимической обработки крупногабаритных листовых изделий | 1983 |
|
SU1084342A1 |
| АВТООПЕРАТОР | 1972 |
|
SU428917A1 |
| Тележка для перевозки штучных грузов | 1985 |
|
SU1348253A1 |
| ФРЕЗЕРНЫЙ СТАНОК | 1969 |
|
SU252049A1 |
| Установка для нанесения покрытий | 1978 |
|
SU1049383A1 |
| УСТРОЙСТВО для ПОДАЧИ ЛЕНТОЧНОГО МАТЕРИАЛА В РАБОЧУЮ ЗОНУ ПРЕССА | 1971 |
|
SU315493A1 |
| Механизм подъема подвесок автооператора | 1974 |
|
SU554320A1 |
| УСТРОЙСТВО для ПЕРЕВОДА МАТРИЧНЫХ МАГАЗИНОВ НАБОРНОЙ СТРОКООТЛИВНОЙ МАШИНЫ | 1967 |
|
SU197620A1 |
| Автоматическая линия Свиноренко для технологической обработки радиоэлементов | 1986 |
|
SU1426755A1 |
| СТАНОК ДЛЯ ЦЕНТРИРОВАНИЯ ЛИНЗ | 1966 |
|
SU180106A1 |