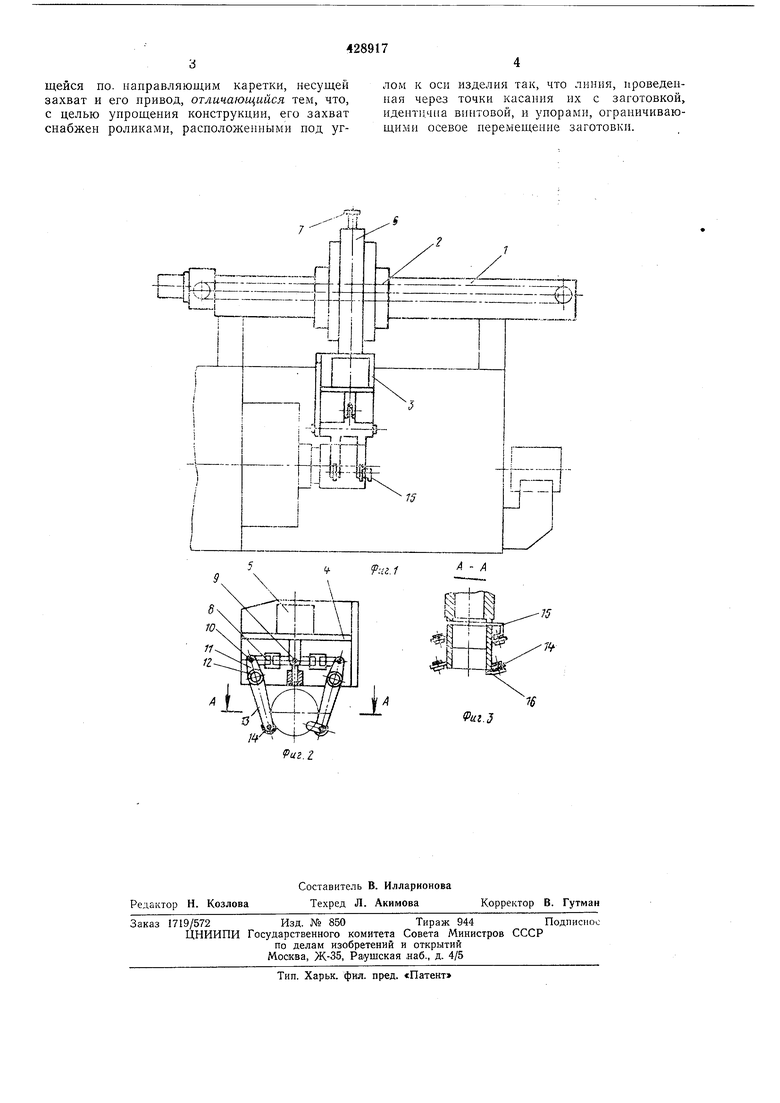
Изобретение относится к устройствам, обслуживающим станки, например для захвата заготовок и транспортировки их к накопителю. Известны автоонераторы, выполненные в виде перемещающейся по направляющим каретки, несущей захват и его привод. Предлагаемый автооператор отличается от известных тем, что его захват снабжен роликами, расположенными под углом к оси изделия так, что линия, проведенная через точки касания их с деталью, идентична винтовой, и упорами для ограничения осевого перемещения детали. На фиг. 1 изображен предлагаемый автооператор, общий вид; на фиг. 2 - механизм захвата автооператора; на фиг. 3 - разрез А-А на фиг. 2. Автоонератор содержит перемещающуюся по укрепленным на станине станка направляющим / каретку 2, несущую механизм захвата 3, на корпусе которого к полке 4 укреплен гидроцилиндр 5 зажима изделия. Механизм захвата 3 подается к изделию с помощью ползуна 6 и гидроциЛИ-ндра 7. Механизм захвата 3 выполнен в виде регулируемых тяг 8, соедине1П Ых с помощью щарнира 9 со щтоком гидроцилиндра 5, а через щар.ниры 10, рычаги и, оси 12 - с захватами 13. На захватах /3 под углом к оси изделия укреплепы ролики 14, причем укреплены таким образом, что линия, проведенная через точки касания их с изделием, идентична винтовой линии. Кроме того, на захватах 13 предусмотрены упоры 15 и 16 для ограничения осевого перемещения изделия. Автооператор работает следующим образом. В момент, когда на трубе уже имеется проточка, механизм захвата 3 опускается в зону обработки, при этом захваты 13 разведены. При перемещении щтока гидроцилиндра 5 захваты 13 сходятся так, что между изделием и роликами остается небольщой зазор, а упор 15 входит в нроточку. После отрезки заготовка укладывается на ролики 14, сохраняя остаточный крутящий момент, благодаря которому перемещается вдоль своей оси до упора 16, совершая винтовое движение. Затем гидроцилиндром 7 механизм захвата 3 выводится из зоиы обработки и каретка 2 по направляющим 1 перемещается вдоль оси станка до накопителя изделий. Предмет изобретения Автооператор, например к отрезным станкам, предназначенный для захвата отрезанных заготовок, выполненный в виде неремещающейся по. направляющим каретки, несущей захват и его привод, отличающийся тем, что, с целью упрощения конструкции, его захват снабжен роликами, расноложенными под углом к оси изделия так, что линия, проведенная через точки касания их с заготовкой, идент11чиа винтовой, и упорами, ограничивающими осевое перемещение заготовки.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТООПЕРАТОР^ i.;0 | 1972 |
|
SU424689A1 |
| ПЕРЕНАЛАЖИВАЕМОЕ УСТРОЙСТВО С ПРОГРАММНЫМ УПРАВЛЕНИЕМ ДЛЯ ТРАНСПОРТИРОВКИ И ПЕРЕГРУЗКИЗАГОТОВОК | 1969 |
|
SU246290A1 |
| Автооператор | 1978 |
|
SU860998A1 |
| Автооператор | 1972 |
|
SU437604A1 |
| ПЕРЕНАЛАЖИВАЕМОЕ УСТРОЙСТВО С ПРОГРАММНЫМ УПРАВЛЕНИЕМ ДЛЯ ТРАНСПОРТИРОВКИ И ПЕРЕГРУЗКИЗАГОТОВОК | 1969 |
|
SU236202A1 |
| АВТООПЕРАТОР | 1971 |
|
SU305035A1 |
| Автооператор | 1979 |
|
SU837755A1 |
| АВТОМАТИЧЕСКИЙ СТАНОК ДЛЯ ЧЕРНОВОЙ ОБРАБОТКИ КОЛЕЦ НЕПРАВИЛЬНОЙ ФОРМЫ | 1969 |
|
SU252812A1 |
| Гибкий производственный модуль для резки заготовок из прутков круглого и квадратного проката | 1986 |
|
SU1431915A1 |
| Автооператор | 1973 |
|
SU446358A1 |
№
iPui.S
