Изобретение относится к области гальванохимической обработки изделий, в частности, к устройствам подъема подвесок автооператора.
Известен автооператор, содержащий тележку с приводами горизонтального и вертикального перемещения подвесок и механизм прижима подвески, выполненный в виде поперечной плиты с центральным стержнем, пружины и направляющей втулки IJ.
Однако механизм прижима не обеспечивает одновременной независимой фиксации противоположных концов подвески в условиях повышенных перекосов и смещений захватных органов.
Известен также механизм подъема подвесок автооператора, содержащий захваты и зажимы, выполненные в виде подпружиненных толкателей, соединенных с системой рычагов 2J.
Данный механизм является наиболее близким к заявленному по своей технической сущности и достигаемому результату.
Однако и этот механизм не обеспечивает одновременной фиксации противоположных концов подвески, т. к. один из рычагов остается в недостаточно полном контакте с подвеской.
В результате вся нагрузка от сил инерции в момент начала движения и останова автооператора приходится на прижатый рычаг, что пропорционально усиливает деформацию каркаса подвески и приводит ее к преждевременному износу.
С целью упрощения конструкции и повышения надежности путем исключения деформации при перекосе захватов предлагаемый механизм подъема подвесок автооператора снабжен упорами, выполненными в виде подпружинных щтоков, кинематически не связанными между собой и установленны.ми соосно с захватами.
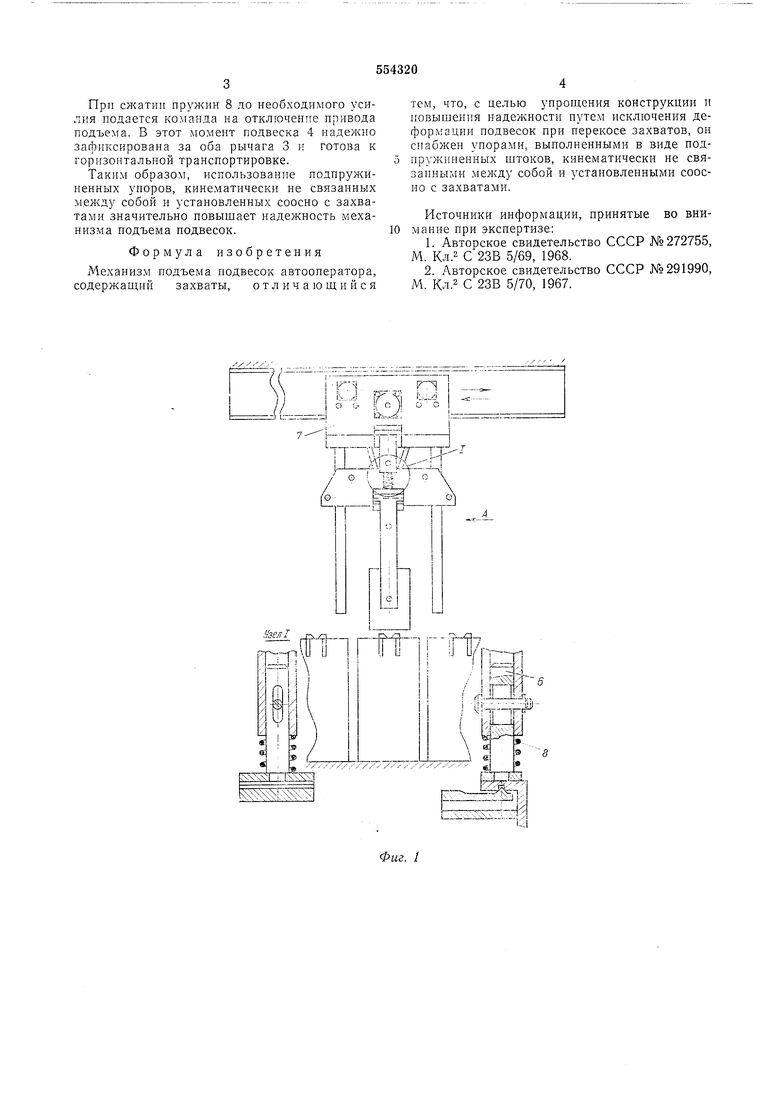
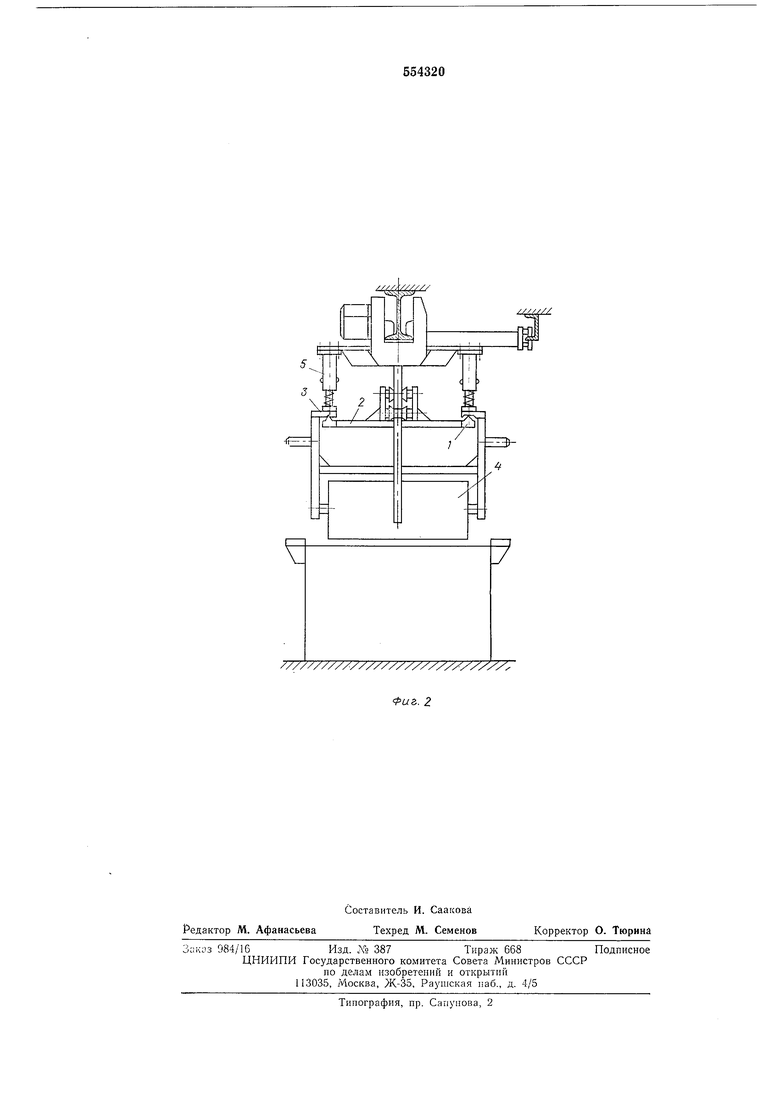
Иа фиг. 1 изображен общий вид механизма подъема подвесок; на фиг. 2 - вид по стрелке А на фиг. 1.
Механизм подъема подвесок автооператора содержит захваты 1, расположенные на траверсе 2, для сцепления с рычагами 6 подвески 4. Механизм снабжен упорами о, выполненными в виде подпружиненных штоков Ь, кинематически не связанными между сооои. Ь процессе работы, по команде тележка / с опущенной траверсой 2 перемещается на заданную позицию.
При совпадении оси траверсы 2 с осью подвески 4 подается команда на подъем и захваты 1 входят в зацепление с рычагами 3.
Б конце подъема верхние плоскости рычагов 3 наезжают на соответствующие упоры независимо одна от другой, при этом погрешность от перекосов и смещении компенсируется в допустимых пределах.
При сжатии пружин 8 до необходимого усилия подается команда на отключение привода подъема. В этот момент подвеска 4 надежно зафиксирована за оба рычага 3 и готова к горизонтальной транспортировке.
Таким образом, использование подпружиненных уноров, кинематически не связанных между собой и установленных соосно с захватами значительно повышает надежность механизма подъема подвесок.
Формула изобретения
Механизм подъема подвесок автооператора, содержащий захваты, отличающийся
тем, что, с целью упрощения конструкции и повышения надежности путем исключения деформации подвесок при перекосе захватов, он снабжен упорами, выполненными в виде подиружниенных штоков, кинематически не связанными между собой и установленными соосно с захватами.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР №272755, М. Кл.2 С 23В 5/69, 1968.
2.Авторское свидетельство СССР №291990, М. Кл.2 С 23В 5/70, 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм подъема подвесок автооператора | 1980 |
|
SU1014997A1 |
| Механизм подъема подвесок автооператора | 1984 |
|
SU1180408A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Автооператор для гальванических линий | 1981 |
|
SU990889A1 |
| Автоматическая линия для гальванохимической обработки деталей на подвесках | 1974 |
|
SU505756A1 |
| Установка для гальванической обработки деталей | 1981 |
|
SU996527A1 |
| УСТРОЙСТВО для ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ | 1971 |
|
SU321408A1 |
| Автоматическая линия для химической обработки деталей | 1974 |
|
SU653199A1 |
| Автооператор для гальванохимических линий | 1985 |
|
SU1330057A1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
f4M|, и и
LJ
tinr-n
nsKf
//// //////
