Известны гибочные механизмы в устройствах для изготовления змеевиков, содержащие установленную на оси с возможностью качательного движения платформу с размещенной на ней гибочной головкой с роликами и направляющее устройство.
Предлагаемый механизм отличается от известных тем, что на платформе установлены с возможностью радиального перемещения две каретки, на каждой из которых установлена гибочная головка. Последняя снабжена стержнем со смонтированной на нем поворотной плитой, на которой в кронгптейне на эксцентричных осях установлены-гибочный и калибрующий ролики с механизмом подвода их к. стержию. При этом головкам сообщено вращательное движение, а направляющее устройство может перемещаться со скоростью, согласованной по величине и направлению с движением платформы.
Кроме того, стержень закреплен на приводном валу и часть его срезана, что облегчает съем заготовки со стержня. Паправляющее устройство установлено на салазка.х с возможностью перемещения по ходовому винту, смонтированному на плоскости и снабженному приводом. ,
Такое конструктивное выполнение устройства позволяет осуществить процесс перекрестной навивки при высоком качестве гиба.
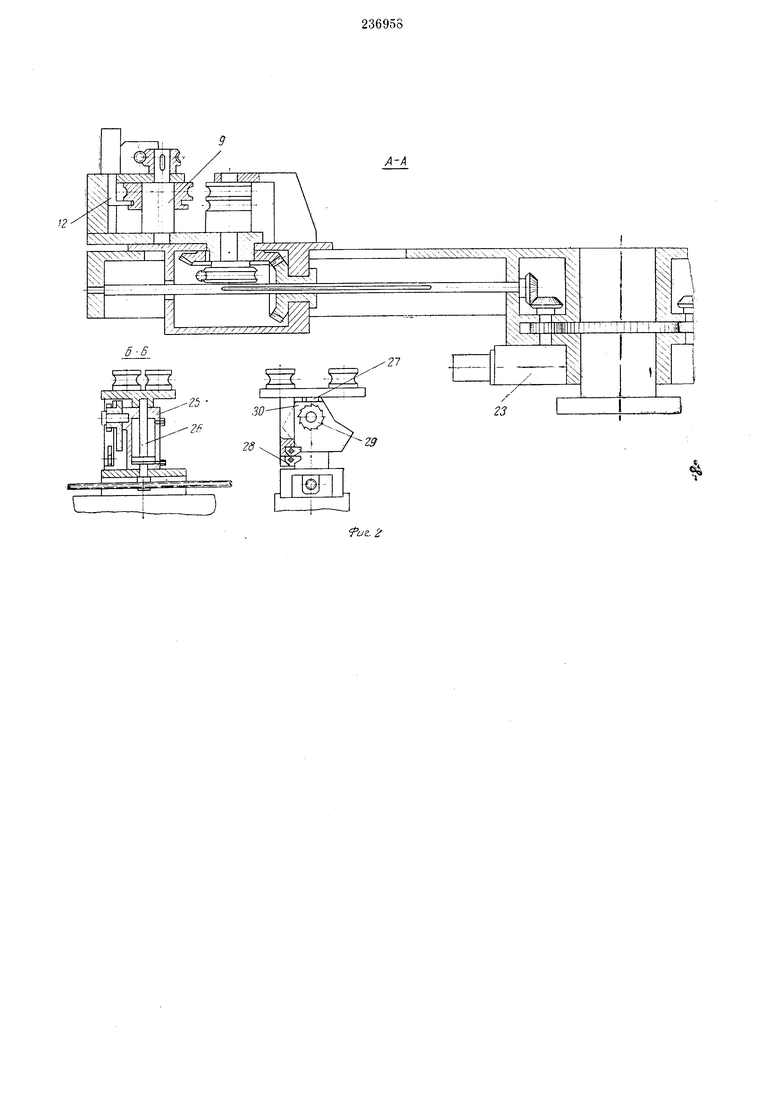
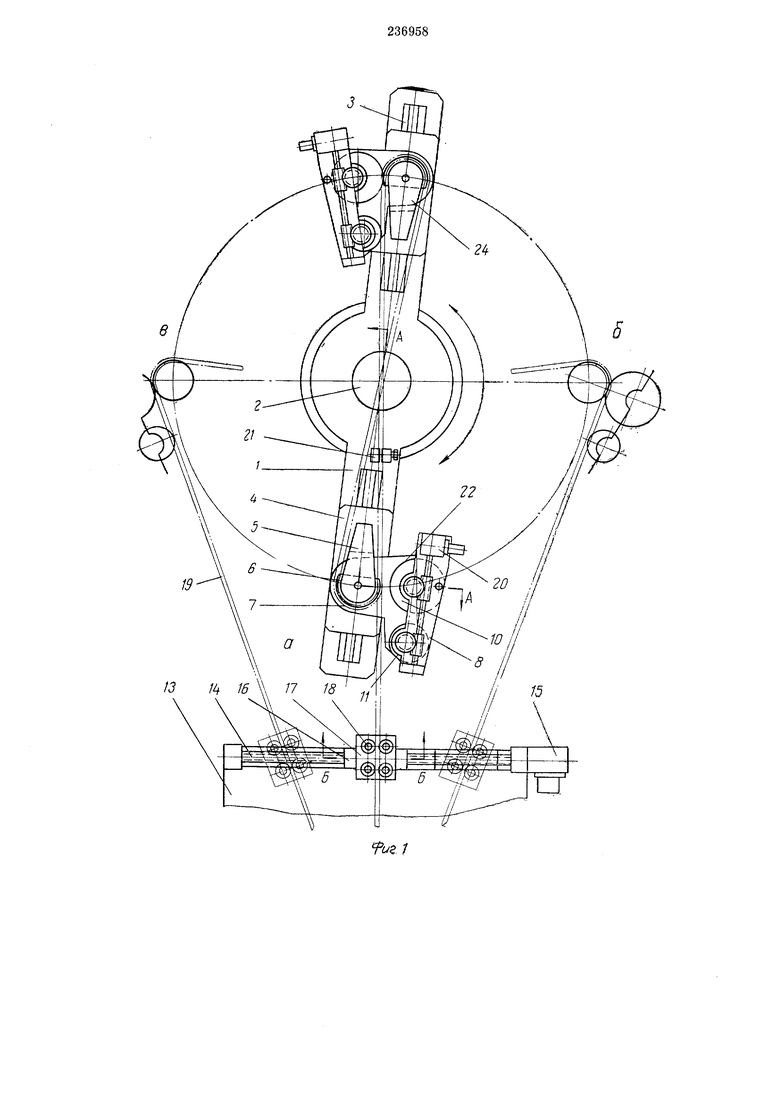
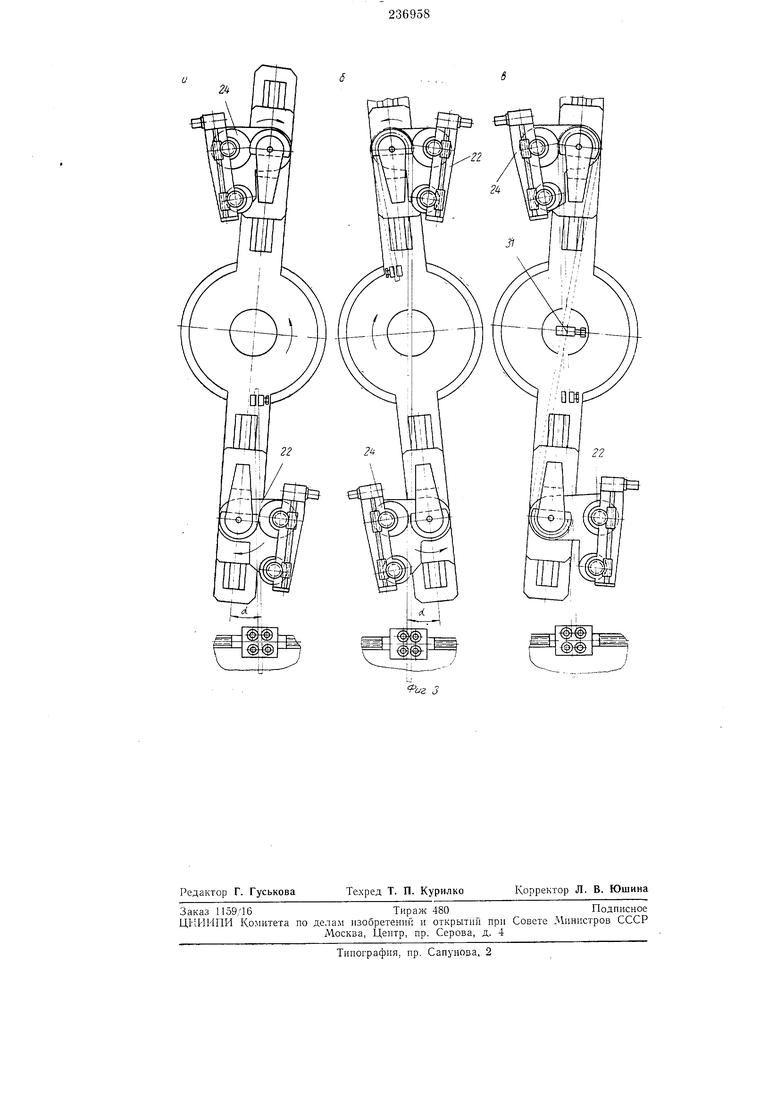
На фиг. 1 изображен описываемый механизм, вид в плане; на фиг. 2 - разрезы по А-А и Б-Б на фиг. 1; на фиг. 3 - взаимное положение узлов в процессе гибки.
Платформа 1 гибочного механиз.ма выполнена в виде балки и снабжена в центральной части отверстием, которым она монтируется на колонне 2. Па направляющих 3 платформы установлены каретки 4. На каждой из
кареток в кронштейне 5 установлен стержень 6, снабженный ручьями, количество которых равно числу шагов змеевика, а профиль соответствует наружному диаметру трубной заготовки. Па валу стержня размещена поворотная плита 7, на которой в кронштейне 8 на эксцентричных осях 9 установлены гибочный 10 и калибрующий 11 одноручьевые ролики, перемещае.мые вдv/ль оси шаговым механизмом 12 и совместно со
стержнем 6 образующие гибочную головку.
Профиль ручья ролика 10 выполнен соответственно диаметру изгибаемой трубы, а ролика // - по кривой, обеспечивающей выправление сечения трубы при гибке.
Для направления заготовки в процессе навивки на плоскости 13 смонтирован ходовой БИНТ 14, вращаемый приводом 15, по которому перемещаются салазки 16 с площадкой 17 п направляющими роликами 18.
Работает гибочный механизм следующим образом. В начале работы платформа установлена, нод. угаом к оси заготовки 19 так, что зарототса располагается но касательной к диад1ет,ру ..-впадин ручОя стержня 6, а нлита 7 - так,..даойил т ния, нроходяндая через центрыстержня н ролика 11, была иернеидикуляриа оси заготовки. Враи,ением привода 20 ролики 10 и // отведены на расстояние, достаточное для прохода заготовкн, н мехаинзмом 12 установлены в нижнее положеине. Салазкн 16 установлены так, чтобы ролики 18 расиолагалнсь по осн заготовки. Зажнм 21 освобожден.
В начале навивки (исходиое положение а узлов) заготовку проводят между роликами /S сквозь ннжинй ручей стержня 6 в зажим 21, где ее конец закрепляют. Включив привод 20 головки 22, иодводят ролнкн 10 н 11 до контакта с заготовкой 19, после чего, включив привод 23, приводят во вращение платформу. Прн этом одновременно вращаются поворотные илиты 7 с роликами 10 и //, изгибая заготовку вокруг стержия 6 головки 22 в инжнем его ручье. В ироцессе иавнвки головки 22 ц 24 вращаются обе в одном наиравлеиии, противоположном иаиравлеи ио вращення нлатформы.
После окончания выполнения первого гиба платформа останавливается в положеиие б с отклонением от оеи заготовки и а угол перегиба а, величина которого подбпраетея оиытиььм путем.
Прн подходе стержня головки 24 к окончательному положению подается сжатое масло внпз цилиндра 25, вследствие чего порщеиь со иггоком 26 подни.мает площадку 27 с роликами и установлеииой в ней заготовкой иа высоту, достаточную для прохождения головки 24 под заготовкой. В процессе перемещеиия площадки с роликами в верх собачки 28 повернут храповик 29 и миогопознциоцный унор 30 так, что после уетановки платформы в исходное положеиие для второго гиба заготовка при оиускаинн ее между стержнем н отодвинутыми в исходное положение роликами головки 24 устаиавливается соосно с иервым (от низа стержня) ручьем.
Цикл вынолнеиия первого гиба змеевика заканчивается.
Работа головки 24 при выполнении второго, иротивоиоложного по расположению н иаправлепию первому гибу, идептична работе головки 22 с тем отличием, что направления поворотов платформы и головки 24 будут оеущеетвляться в протнвоноложные нервому стороны.
Пикл гибки заканчивается при установке платформы в положение в, аиалогичиое иоложению а, с TeiM отличием, что заготовка устаиавливается соосио со вторым (от ииза стержня) ручье:, а гибочный и калибрующий ролнки также иодннмутея на уровень второго ручья стержня до совмещеиня профилей их ручьев.
В результате выиолиения двух изгибов образуется виток змеевика, ирямолинейные участки которого перекрещены.
Повторяя многократно указанный цикл, получают з.меевик, навитый перекрестно вокруг двух стержней гибочных головок.
Снимают навитую заготовку со стержней следующи1М образом.
В месте перекрещивания прямолинейных участков устанавлнвают съемный зажим 31, предотвращающий самопроизвольное вынрямление иавнтой заготовки. Затем иосредством привода и передачи перемещают каретки обеих головок иа некоторую величину к колонне платформы, вследствие чего ручьи стержней выйдут из ко гтакта с навитой заготовкой и образуется зазор между наружной поверхпостью стержня и в)утренней поверхностью навнтой заготовки. Это позволит свободно снять заготовку со стержней. Положив иавитую заготовку на плоскость, зажил снимают. ВиткИ освобождепной от зажима навитой заготовки под воздействием упругих сил в местах изгиба выпрямятся, вследствие чего образуется змеевик.
Предмет изобретен и я
1. Гибочный механизм к устройству для изготовлеиия змеевиков, содержащий уетановлеиную на оси с возможностью качательного движеиня илатформу с размещенной на ней гнбочной головкой е роликами и иаиравляющее устройство, отличающийся тем, что, с целью осуществления перекрестной навивки и
иовышения ироизводительности, иа платформе установлены с возможностью радиальиого иеремещения две каретки, на каждой из которых расположеиа гибочная головка, снабженная стержнем с моитированной на нем
новоротиой ИЛ1ГГОЙ, на которой установлены гибочный и калибрующий ролики с механизмом иодвода их к стержию, нричем головкам сообщено вращательное движение, а направляющее устройство может перемещаться со
скоростью, согласованной ио велнчнне и направлению с движением платформы.
2.Механизм по п. 1, отличающийся тем, что, с целью облегчения еъема заготовки со стержня, последний закреплен иа приводном
валу и часть его срезана.
3.Механизм по пи. 1 и 2, отличающийся тем, что направляющее устройство установлено па салазках с возможностью перемещения ио ходовому винту, смоитированному на илоскости и снабженному приводом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перекрестной навивки змеевиков | 1968 |
|
SU269687A1 |
| Станок для изготовления змеевиков | 1977 |
|
SU725766A1 |
| Устройство для перекрестной навивки змеевиков | 1976 |
|
SU662198A1 |
| Установка для навивки змеевиков | 1980 |
|
SU919781A1 |
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
| Способ гибки змеевиков и устройство для его осуществления | 1988 |
|
SU1814575A3 |
| Устройство для навивки цилиндрических спиралей | 1986 |
|
SU1480924A1 |
| Станок для изготовления змеевиков | 1981 |
|
SU997905A1 |
| Трубогибочная машина | 1985 |
|
SU1299655A1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |