1
Изобретение относится к обработке металлов давлением, в честности к трубогибочному оборудованию для гибки труб в холодном состоянии, и может найти применение во многих отраслях машиностроения, в частности в энергомашиностроении для изготовления плоских змеевиков из оребренных трубных плетей, используемых в конструкциях мембранных, экономайзеров.
Изобретение .предназначено для решения технологических проблем, связанных с расширением технологических возможностей и повышением производительности, трубогибочного оборудования при освоении в кот.лостроении новых мембранных конвективных поверхностей нагрева.
Наиболее близким по технической сушности к предлагаемому является станок для гибки змеевиков из трубных плетей, содержаш,ий установленную на оси с возможностью попеременного вращения сменную платформу с подвижно установленными на ней двумя каретками с рабочими головками, механизмами фиксации и выталкивания трубы, приводными шестернями, связанными между собой синхронизирующей рейкой, и ме ханизма вывода изогнутого участка из зоны
гибки, установленный на соответствующих каретках, каждый из которых выполнен в виде ползуна, закрепленного на ползуне поворотного захвата с кулачком, связанных с ним тяги и кула-чка, а также силового цилиндра, связанного с тягой и закрепленного на корпусе, а также расположенных на ползуне подпружиненных упоров, имеющих возможность взаимодействия с тягой и кулачком.
10
Станок позволяет механизировать трудоемкие вспомогательные операции, включая операции надежной фиксации заготовки, выталкивания колена змеевика из ручья гибочного шаблона, перемещение колена из зоны 15 гибки на шаг, равный размеру между сформированными ветвями змеевика 1.
Однако в связи с расширением производства мембран их экономайзеров и увеличе2Q нием типоразмеров змеевиков технологические возможности станка и его производительность несколько снижены,, в связи с чем появилась необходимость расширить зону действия механизмов вывода изогнутых участков из зоны гибки.
Целью изобретения является повышение производительности и упрощение конструкции.
С этой целью в станке для изготовления змеевиков, содержащем установленную на станине с возможностью поворота на оси сменную платформу, две каретки с гибочными роликами, смонтированные в корпусах на оси платформы и имеющие возможность вращения относительно своей оси, приводные шестерни, установленные на осях кареток, синхронизирующую рейку, взаимодействующую с обеими приводными шестернями, два механизма фиксации, кинематически связанные с соответствующими каретками, и два механизма вывода изогнутого участка из зоны гибки, каждый механиз-м вывода изогнутого участка из зоны гибки выполнен в виде кривощипа, поворотно закрепленного в корпусе соответствующей каретки, снабженного приводной звездочкой, в котором смонтирован исполнительный вал со съемНИКОМ, несущим щестерню, и жестко закрепленного в корпусе соосно кривощипу центрального вала, на котором установлена базовая щестерня, взаимодействующая посредством промежуточной щестерни с шестерней, установленной на съемнике.
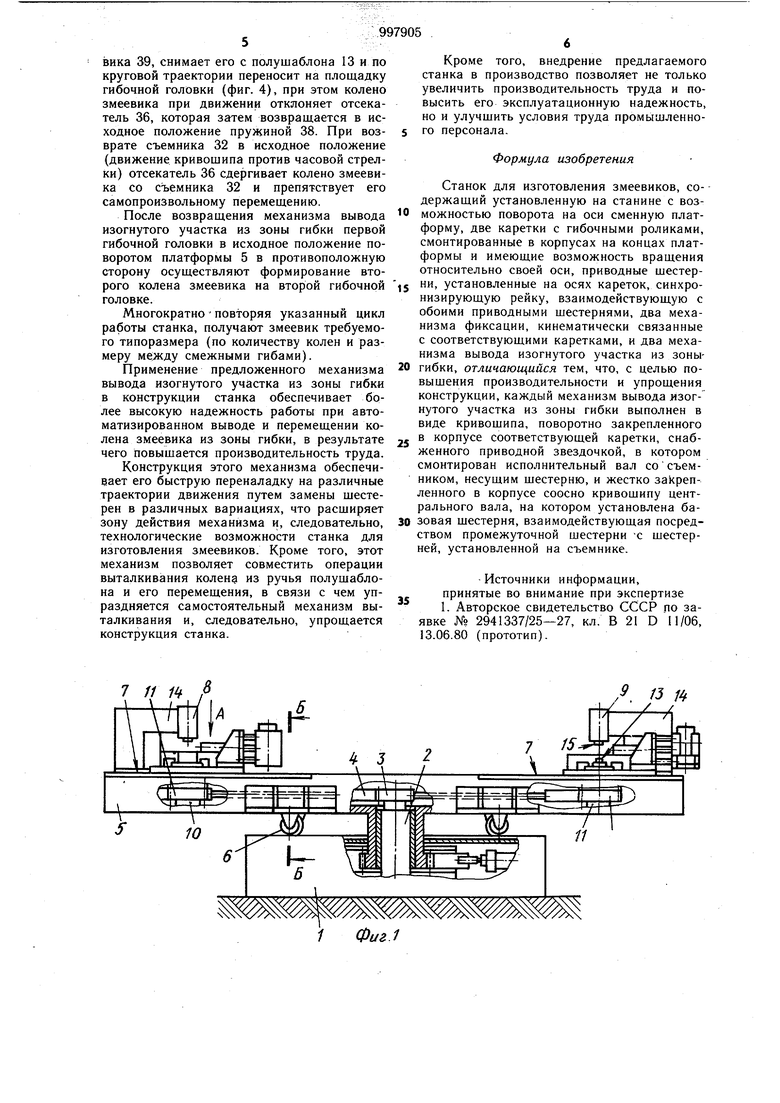
На фиг. 1 изображен станок; на фиг. 2 вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1 (исходное положение подающего механизма); на фиг. 4 - положение подающего механизма в конце хода); на фиг. 5 - разрез В-В на фиг. 3.
Станок для изготовления змеевиков содержит станину I с жестко закрепленным в ней валом 2 с центральной щестерней 3, сопряженной с синхронизирующей рейкой 4. На валу 2 подвижно смонтирована поворотная платформа 5, посредство.м катков б .опирающаяся на верхнюю плоскость станины.
В продольных направляющих 7 платформ с возможностью перемещения установлены каретки с гибочными головками 8 и 9, каждая из которых содержит ось 10 с подвижно укрепленной на ней приводной щестерней 11, шестерни обеих кареток взаимодействуют с синхронизирующей рейкой 4, которая подвижно смонтирована в направляющих 12 поворотной платформы. В верхней части оси 10 укреплен нижний полушаблон 13 (разъемно с шаблона), соосно с которым на кронштейне 14 с возможностью вертикального перемещения смонтирован верхний полущаблон 15.
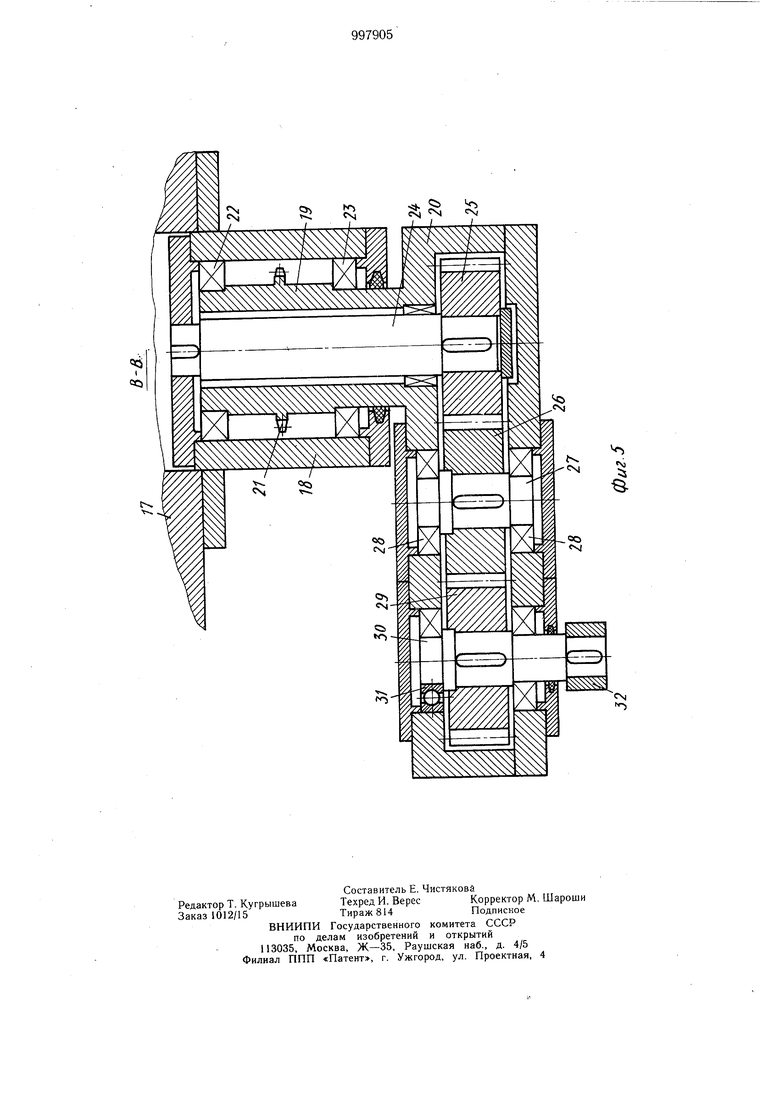
Каждая каретка с гибочной головкой снабжена механизмом вывода изогнутого участка из зоны гибки 16, смонтированным на плите 17 и содержащим корпус 18, в котором поворотно закреплена щейка 19 кривошипа 20, шейка кривошипа снабжена приводной звездочкой 21 и опирается на подшипники 22 и 23. Соосно с шейкой кривошипа в корпусе 18 неподвижно укреплен
центральный вал 24, на (ротором жестко установлена базовая шестерня 25, контактирующая посредством промежуточной шестерни 26, закрепленной на пальце 27 в подшипниках 28, с шестерней 29, смонтированной на валу 30 в подшипниках 31, на конце вала 30 жестко укреплен съемник 32.
Привод механизма вывода .изогнутого участка из зоны гибки осуществляется гидроцилиндром 33 двустороннего действия посредством цепи 34, контактирующей с приводной звездочкой 21 и промежуточными звездочками 35.
Каждая гибочная головка снабжена отсекателем 36, установленным поворотно на оси 37 и удерживаемым в рабочем положении пружиной 38.
Станок работает следующим образом.
В исходном положении перед гибкой кривощип 20 механизмов вывода изогнутого участка из зоны гибки устанавливают ниже плоскости расположения заготовки (фиг. 3), полущаблоны 15 подняты вверх - рабочая зона гибочных головок открыта.
Трубная плеть подается в рабочую зону одной из гибочных головок и при смыкании полушаблонов 13 и 15 жестко фиксируется. Поворотом платформы 5 осуществляется гибка на заданный угол участка плети на первой гибочной головке, при этом вторая гибочная головка автоматически занимает исходное положение для формирования второго гиба (колено змеевика), а свободный участок плети устанавливается (также автоматически) в;зону гибки этой головки. При смыкании полущаблонов 13 и 15 второй гибочной головки плеть жестко фиксируется в ней, одновременно с этим полущаблон 15 первой гибочной головки поднимается вверх, освобождая сформированное колено змеевика.
Перед выполнением гибочной операции на второй гибочной головке и подготовки первой гибочной головки к работе сформированное на ней колено необходимо вывести из зоны гибки. Для этого включением гидроцилиндра 33 на рабочий ход кривошипу 20 сообщают вращательное движение по часовой стрелке (фиг. 3 и 4) относительно корпуса 18, при этом базовая шестерня 25 остается неподвижной, а шестерня 26, обкатываясь по ней, сообщает вращение шестерне 25 и, следовательно, съемнику 32, жестко связанному с ней посредством вала 30. Наличие в конструкции механизма вывода изогнутого участка трех шестерен с одинаковым диаметром делительной окружности позволяет синхронизировать поворот кривошипа 20 и вала 30 со съемником 32, обеспечивая последнему плоско-параллельное перемещение относительно гибочной головки.
Во время рабочего перемещения кривощипа съемник 32 захватывает колено змеевика 39, снимает его с полушаблона 13 и по круговой траектории переносит иа площадку гибочной головки (фиг. 4), при этом колено змеевика при движении отклоняет отсекатель 36, которая затем возвращается в исходное положение пружиной 38. При возвраге съемника 32 в исходное положение (движение кривошипа против часовой стрелки) отсекатель 36 сдергивает колено змеевика со съемника 32 и препятствует его самопроизвольному перемещению. После возвращения механизма вывода изогнутого участка из зоны гибки первой гибочной головки в исходное положение поворотом платформы 5 в противоположную сторону осуществляют формирование второго колена змеевика на второй гибочной головке. Многократно повторяя указанный цикл работы станка, получают змеевик требуемого типоразмера (по количеству колен и размеру между смежными гибами). Применение предложенного механизма вывода изогнутого участка из зоны гибки в конструкции станка обеспечивает более высокую надежность работы при автоматизированном выводе и перемещении колена змеевика из зоны гибки, в результате чего повышается производительность труда. Конструкция этого механизма обеспечивает его быструю переналадку на различные траектории движения путем замены шестерен в различных вариациях, что расширяет зону действия механизма и, следовательно, технологические возможности станка для изготовления змеевиков. Кроме того, этот механизм позволяет совместить операции выталкивания колена из ручья полушаблона и его перемещения, в связи с чем упраздняется самостоятельный механизм выталкивания и, следовательно, упрощается конструкция станка. Кроме того, внедрение предлагаемого станка в производство позволяет не только увеличить производительность труда и повысить его эксплуатационную надежность, но и улучшить условия труда промышленного персонала. Формула изобретения Станок для изготовления змеевиков, содержащий установленную на станине с возможностью поворота на оси сменную платформу, две каретки с гибочными роликами, смонтированные в корпусах на концах платформы и имеющие возможность вращения относительно своей оси, приводные шестерни, установленные на осях кареток, синхронизирующую рейку, взаимодействующую с обоими приводными шестернями, два механизма фиксации, кинематически связанные с соответствующими каретками, и два механизма вывода изогнутого участка из зоныгибки, отличающийся тем, что, с целью повышения производительности и упрощения конструкции, каждый механизм вывода лзогнутого участка из зоны гибки выполнен в виде кривощипа, поворотно закрепленного в корпусе соответствующей каретки, снабженного приводной звездочкой, в котором смонтирован исполнительный вал сосъемником, несущим шестерню, и жестко закрепленного в корпусе соосно кривошипу центрального вала, на котором установлена базовая шестерня, взаимодействующая посредством промежуточной шестерни -с шестерней, установленной на съемнике. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2941337/25-27, кл. В 21 D 11/06, 13.06.80 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для изготовления змеевиков | 1980 |
|
SU863072A1 |
| Станок для гибки змеевиков | 1985 |
|
SU1333437A2 |
| Станок для изготовления змеевиков | 1980 |
|
SU946724A1 |
| Станок для изготовления змеевиков | 1977 |
|
SU725766A1 |
| Станок для гибки змеевиков | 1980 |
|
SU935162A1 |
| Станок для гибки змеевиков | 1979 |
|
SU854507A1 |
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| Станок для гибки змеевиков | 1985 |
|
SU1248692A1 |
| Станок для гибки змеевиков | 1984 |
|
SU1207562A2 |


7 // /4« / Фиг.1
