Известны питатели для загрузки роторных линий деталями пилиндрической формы, в которых подача деталей из .приемника в захваты транспортного ротора осуществляется под действим шибера, жестко связанного с подпружиненным лолзуном, движущимся по неподвижному корпусу от кулачка, установленного на валу транспортного ротора.
Описываемый питатель позволяет производить периодическую подачу деталей различлых типоразмеров в захватные органы транспортного ротора, для чего его приемник подпружинен и выполнен ПОДВИЖНЫМ относительно корпуса и шибера и жестко связан с упорным пальцем, средняя часть которого свободно входит в паз шибера, а концы - в пазы корпуса. При этом соотношение размеров пазов шибера и корпуса соответствует необходимой величине Подачи детали.
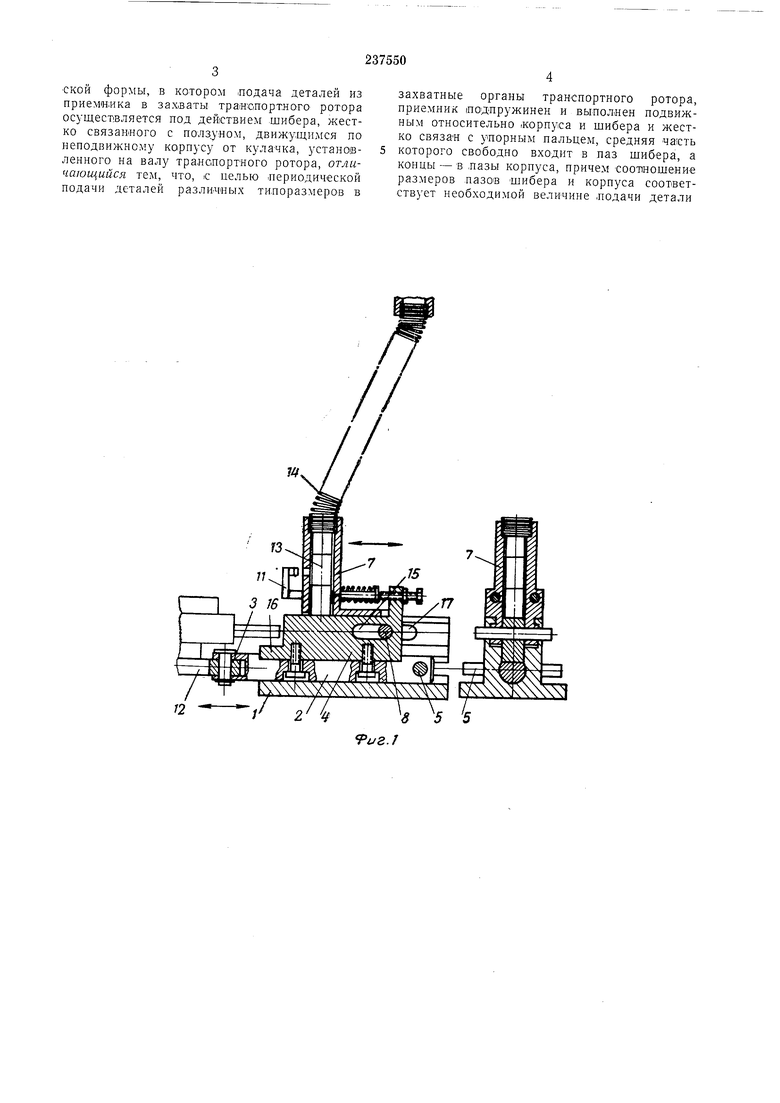
Описываемый питатель показан на фиг. 1 и 2 в трех проекциях с разрезами.
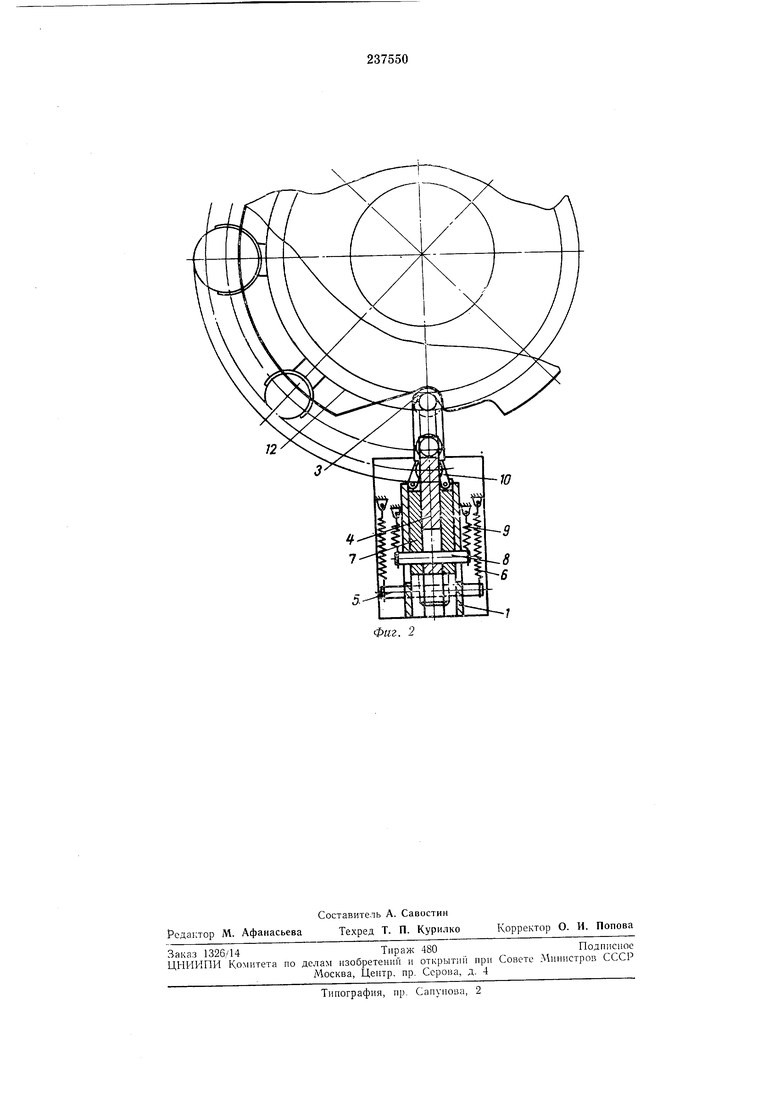
Питатель смонтирован в корпусе /, в цилиндрической расточке которого размещен ползун 2 с роликом 3, шибером 4 и пружииодержателем 5. К последнему крепятся концы пружин 6, другие коицы которых крепятся к Корпусу У. В продольном пазу корпуса установлен приемник 7 с жестко укрепленным пальцем 8, связанным посредством пружин 9 (см. фиг. 2) с корп} ом /. Приемник
снабжен подпружиненными п бками 10 тл, отсекателем //. Перемещение ползуна 2 происходит под дей)ствием установленного на оси транспортного poTopai кулачка 12, контактирующего с роли.ком 3.
Заготовки 13 по витому трубчатому магазину 14 поступают под действием собственного веса в приемник 7 на поверхность шибера 4. Под действием кулачка 12 ползун 2
с шибером 4 перемещается вправо и после упора торцом своего (Паза 15 в палец 8 увлекает за собой приемник 7. Отсекатель И удерживает столб заготовок; очередная загоTOBiKa, расположенная ниже отсекателя, падает в поддон 16 и захватывается губками 10. После этого ползун 2 с шибером 4 и приемник 7 под действием пружин 6 н 9 перемещаются влево. После первой части хода, равной длине имеющегося в корпусе паза 17,
приемник 7 останавливается, а ползун 2 с шибером 4, на поддоне 16 которого находится заготовка, продолжает двигаться в том же направлении под действием пружины 6, передавая заготовку в захватный орган транспортного ротора.
ской формы, в котором лодача деталей из приеми.ика в захваты транспортного ротора осуществляется под действием шибера, жестко связанного с ползумом, движущимся по неподвижному корпусу от кулачка, установленного на валу транспортного ротора, отличающийся тем, что, с целью периодической подачи деталей различ-ных типоразмеров в
захватные органы транспортного ротора, приемник подпружинен и выполнен подвижным относительно .корпуса и шибера и жестко связан с упорным пальцем, средняя чають которого свободно входит в паз шибера, а концы - в лазы корпуса, причем соот1ношение размеров лазов шибера и корпуса соответствует необходимой величине лодачи детали
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный автомат питания | 1987 |
|
SU1524988A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Роторно-конвейерная машина с вертикальной осью для листовой штамповки | 1986 |
|
SU1428562A1 |
| Загрузочный ротор | 1990 |
|
SU1780988A1 |
| Загрузочный ротор | 1989 |
|
SU1646783A1 |
| Захватный орган устройства для подачи заготовок в рабочую зону | 1978 |
|
SU740359A1 |
| Загрузочный ротор | 1989 |
|
SU1671441A1 |
| Загрузочно-разгрузочное устройство | 1985 |
|
SU1569175A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Плоскопрокатное устройство | 1978 |
|
SU764812A1 |
J2 -/ 2/ф
ГУ 5
i/aJ
