Известны авторулевые, содержащие гирокомпас, дифференцирующее и интегрирующее устройства, фазочувствительный выпрямитель и следящий привод руля, охваченный жесткой обратной связью, позволяющие осуществить стабилизацию угла курса корабля.
Предложенное устройство отличается от известных тем, что оно позволяет уменьшить время восстановления заданного курса и увеличить срок службы рулевых мащин путедМ уменьшения числа перекладок руля в единицу времени.
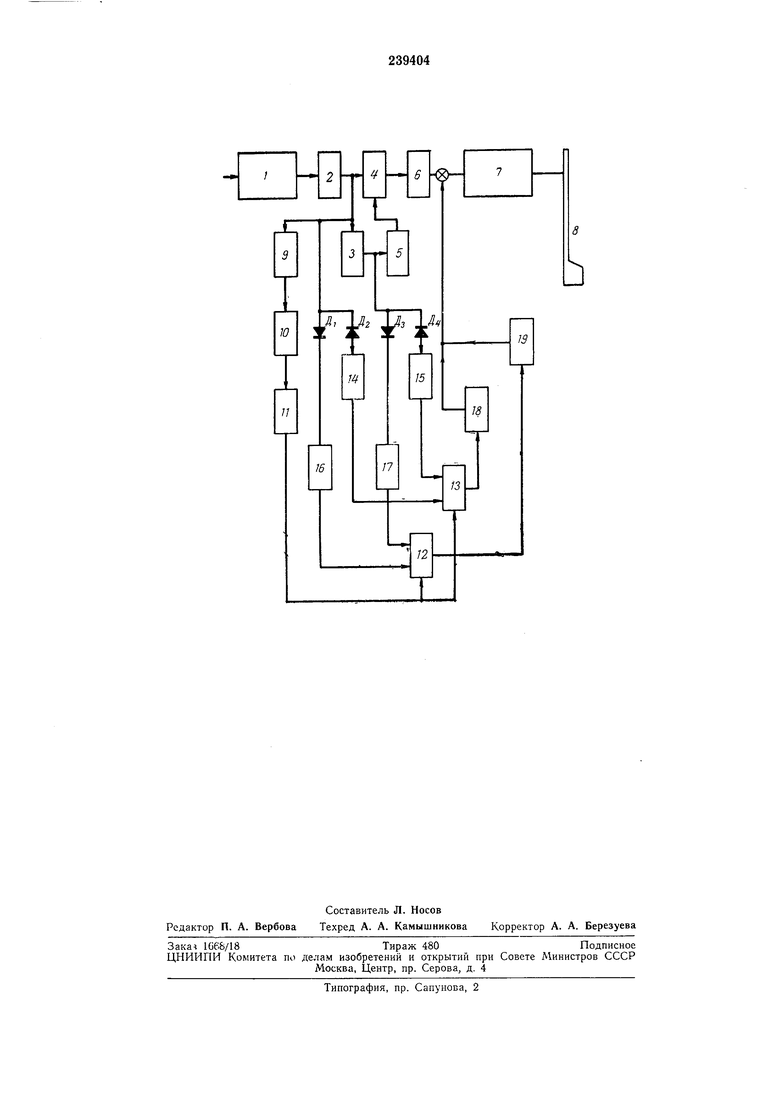
На чертеже представлена блок-схема предлагаемого устройства.
Датчик щрса гирокомпаса / подключен ко входу фазочувствительного выпрямителя 2, к выходу которого подсоединены дифференцирующее устройство 3 и блок 4 измерения постоянной времени интегрирования. Выход устройства 3 соединен со входом выпрямителя 5, который подключен на второй вход блока 4. Выход блока 4 соединен с интегрирующим устройством 6 и далее последовательно- со входом следящего привода 7 руля 8. Выход выпрямителя 2 последовательно соединен с двухполупериодным выпрямителем 9, блоком сравнения 10 и пороговым устройством II, выход которого соединен с двумя входами параллельно включенных логических блоков «И 12 и 13. Кроме того, выходы выпрямителя 2 и устройства 3 через встречно включенные диоды соединены со входами соответствующих пороговых устройств 14-17.
Выходы пороговых устройств, соответствующие одинаково включенным диодам Д1-Д, связаны со вторыми и третьими входами блоков 12 и 13, выходы которых через ключи 18 и 19 подсоединены на вход привода 7.
При отклонении корабля от заданного курса при малых значениях угла и скорости изменения угла рыскания, например, при волнении моря 2-3 балла автоматическая стабилизация корабля по курсу осуществляется в основном по цепочке блоков и устройств /-2- 4-6-7-8. Сигнал управления в этом случае содержит информацию об отклонении корабля от заданного курса, обусловленного действием морского волнения и длительными возмущениями, подобными моменту от разности тяг гребных винтов.
Интегрирующее устройство 6 накапливает во времени сигнал отклонения корабля, пропорциональный прилол енному к нему возмущению, который через следящий привод 7 проходит на руль 8, обеспечивая его смещение в положение, пропорциональное этому возмущению.
нении, которая уменьшается по мере уменьшения средней скорости рыскания, поступаюш,ей в блок 4 из устройства 3 через выирямитель 5. Уменьшение постоянной времени равносильно увеличению коэффициента усиления интегрируюш,его устройства, вследствие которого возрастает скорость интегрирования и увеличивается быстродействие замкнутой системы «корабль-регулятор. По мере увеличения волнения и средней скорости рыскания коэффициент усиления блока 4 автоматически уменьшается до величины, при которой скорость интегрирования уменьшается так, что при волнении 4-5 баллов обеспечивается такое же быстродействие, как при малой оалльности.
b условиях возросшего волнения но стабилизации корабля па заданном курсе работают устройства и блоки о-17, в которых производигся оценка и сравнение величин модулей текуш,его и допустимого значений углов рыскания и скорости его изменения. Сигнал, пропорциональный углу рыскания, проходит через выпрямитель 9 иа блок сравнения JO модулей текущего и допустимого значений угла рыскания. В случае превышения модуля текуш,его значения угла рыскания допустимого значения сигнал проходит на устройство /J, имеюш,ее релейную характеристику. При наличии сигнала па выходе устройства 11 на один из входов блоков 12 н 3 поступают сигналы, одновременно с которыми на вторые и третьи входы этих блоков с выпрямителя 2 и устройства с) поступают сигналы через диоды и пороговые устройства 14-17. При совпадении знаков угла рыскания и скорости его изменения срабатывают указанные пороговые устройства, и сигналы проходят па соответствующие блоки «И 12 или .
Если текущее значение модуля больше допустимого, то па выходе одиого из этих блоков появляется сигнал управления, который поступает через ключи 18 либо 19, имеющие
релейную характеристику, на вход привода 7, который отклоняет руль 8 в нужную сторону с максимальной скоростью. Под действием отклоненного руля скорость отклонения угла рыскания уменьшается и затем изменяет знак. В результате на входе пороговых устройств 15 или 17 пропадает сигнал, что приводит к отключению соответствующих блоков «И 12, 13 и ключей 18, 19, и руль 8 сигналом обратной связи возвращается в исходное положение.
Предмет изобретения
Авторулевой, содержащий гироскопический датчик курса, дифференцирующее и интегрирующее устройства, фазочувствительный выпрямитель и следящий привод руля, охвачепный жесткой обратной связью, отличающийся
тем, что, с целью уменьщения времени восстановления заданного курса и увеличения срока службы рулевых мащин путем уменьшения числа перекладок руля в единицу времени, в нем установлены дополнительно блок изменег ия постоянной интегрирования интегрирующего устройства, два двухполупериодных выпрямителя, блок сравнения, четыре диода, пороговые устройства, ключи и два блока «И, подключенных первыми входами через одно
пороговое устройство, блок сравпения и двухполуперподный выпрямитель к выходу фазочувствптельпого выпрямителя, к которому через два встречно включенных диода и пару пороговых устройств подсоединены вторые
входы блоков «И, подключенных третьими входами через вторую пару пороговых устройств и встречпо включепных диодов к выходу дифференцирующего устройства, причем выход дифференцирующего устройства подключей к блоку изменения постоянной интегрирования интегрирующего устройства, а выходы блоков «И через ключи подсоединены ко входу следящего привода руля.
А
, .Л ,/3 ...
11
SH19
15
18
| название | год | авторы | номер документа |
|---|---|---|---|
| Авторулевой | 1988 |
|
SU1579851A1 |
| Устройство автоматического управления курсом судна | 1984 |
|
SU1237555A1 |
| Авторулевой | 1988 |
|
SU1527092A1 |
| Автоматическая система управления силовым приводом судового руля | 1983 |
|
SU1102715A2 |
| АВТОРУЛЕВОЙ ДЛЯ СУДОВ | 1969 |
|
SU254356A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| Судовой авторулевой | 1982 |
|
SU1017594A1 |
| Устройство для управления бортовыми рулями успокоителя качки судна | 1983 |
|
SU1147636A1 |