Предложенный автооператор может быть использован в области машиностроения при создании автоматических линий.
Известны автооператоры для перемещения заготовок, содержащие рабочий орган с захватами, силовой цилиндр и ролик, взаимодействующий с цилиндрическим копиром, имеющим продольные и наклонные пазы. Однако в известных автооператорах не исключен ооворот рабочего органа в направлении, лротивОПоложном заданному.
Предлагаемый автооператор для перемещения заготовок отличается от известных тем, что наклонные пазы цилиндрического копира выполнены переменной глубины с постепенным подъемом в сторону, обратную направлению его вращения, и образуют уступ с продольными пазами, а ролик выполнен подпружиненным.
Такое выполнение автооператора исключает поворот рабочего органа в направлении, противоположном заданному.
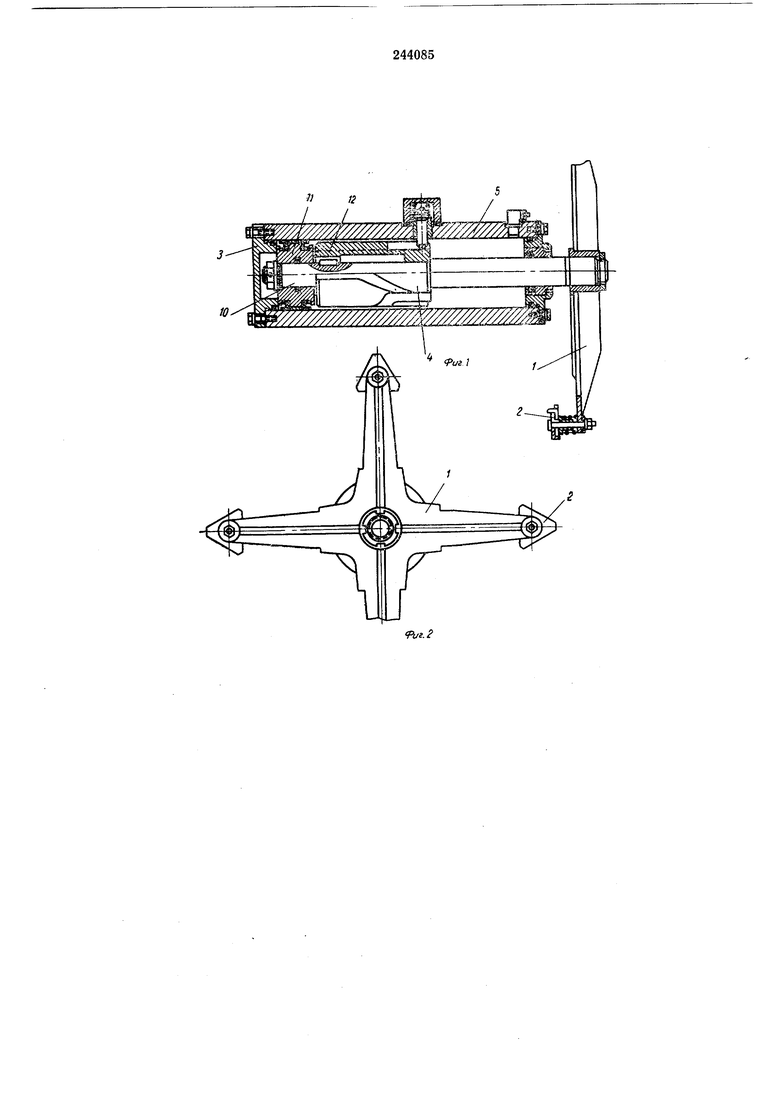
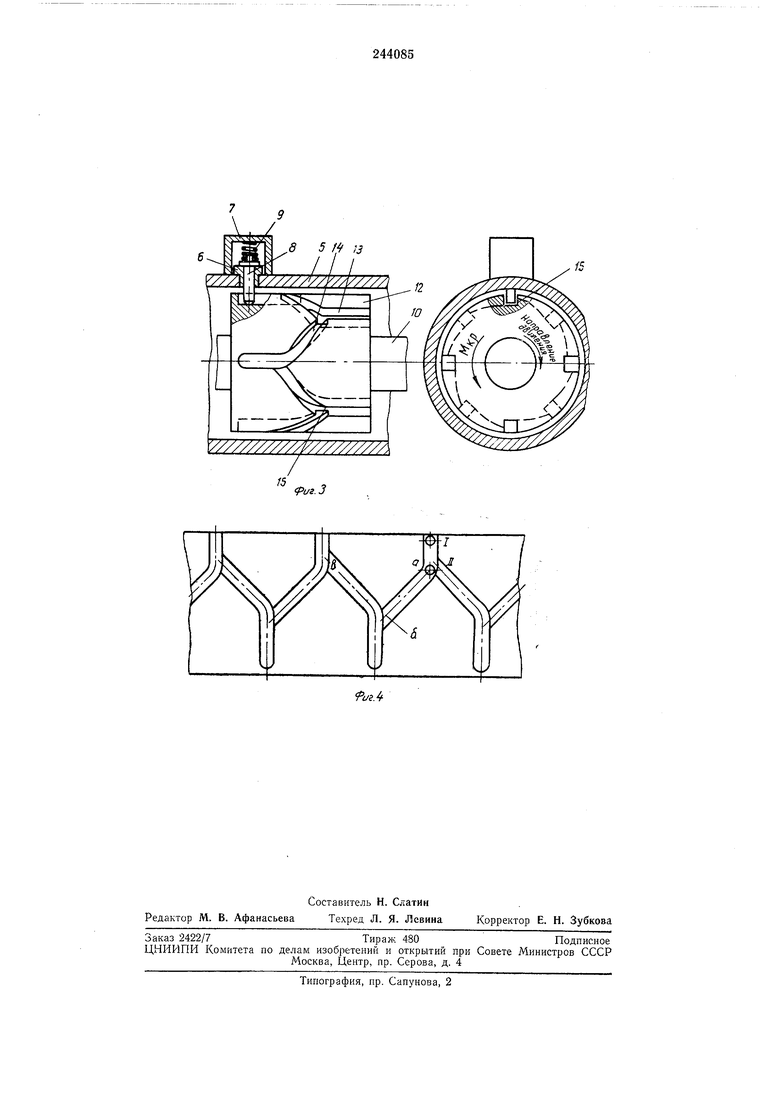
Па фиг. 1 изображен предложенный автооператор в крайнем заднем поло}кении (продольный разрез); на фиг. 2 - рабочий орган с захватом; на фиг. 3 - узел цилиндрического копировального механизма в крайнем переднем положении; на фиг. 4 - развертка цилиндрического копира.
Автооцератор для перемещения заготовок состоит из рабочего органа / с захватами 2, выполненного в виде равноплечего рычага, служащего для захвата, переноса, установки и снятия заготовок с позиции на позицию, силового пневмо-(гидро) цилиндра 3, сообщающего рабочему органу / возвратно-поступательное движение, узла цилиндрического копировального механизма 4 для сообщения рабочему органу i направленного вращательного движения. В корпусе 5 силового цилиндра закреплены направляющая втулка 6 и крышка 7; во втулке устанавливается ролик 8, а в крышке 7- дружина 9. На штоке W силового цилиндра жестко закреилены поршень 11, цилиндрический копир 12 и рабочий орган /. На цилиндрическом копире 12 выполнено несколько расположенных е шахматном порядке продольных пазов 13, соединенных между собой наклонными пазами 14. В свою очередь, наклонные пазы М выполнены с переменной глубиной, т. е. образующая их дна имеет постепенный подъем от точки а до точки б; в пепеходных точках б и а образуется уступ 15, по высоте равный, например, 0,5 глубины продольного паза 13.
Работа автоолератора осуществляется следующим образом.
местно со штоком 10 и установленным на чем копиром 12 получают поступательное движение вперед. Ролик 8, скользя по продольному пазу 13 из позиции / движется до позиции //, т. е. до начала наклонного паза 14. Скользя по наклонному пазу 14, ролик 8 -принудительно сообщает вращательное движение штоку 10, который, в свою очередь, сообщает вращательно-поступательное движение рабочему органу / совместно с заготовкой. В результате постепенного подъема дна наклонного паза 14 ролик 8, скользя в направляющей втулке 6, сжимает пружину 9. Пройдя уступ 15, ролик под действием пружины 9 опускается в следующий продольный паз 13 и вращательнопоступательное движение рабочего органа 1 с заготовкой переходит только в поступательное до момента подачи команды на остановку поршня 11. При обратном движении поршня //, а следовательно, и штока 10 с рабочим органом 1 и цилиндрического копира 12 ролик 8, скользя по iBTopOMy продольному пазу 13, минует, даже при приложении -крутящего момента (Мкр), первый наклонный паз 14, из которого он вышел, так как его вхождению препятствует уступ 15.
Далее ролик 8 начинает скользить по следующему наклонному пазу 14, сообщая вращательное движение штоку 10 и рабочему
органу / с деталью. Как и в первой половине цикла ролик 8, скользя по наклонному пазу 14, сжимает пружину 9, а при прохождении второго уступа 15 опускается под ее воздействием. Пройдя второй уступ 15, ролик скользит по третьему пазу 13, тем самым прекращая вращение щтока 10 с рабочим органом 1. По окончании возвратного движения поршня // ролик, в третьем продольному пазу 13 устанавливается в исходном полол ении, а рабочий орган 1 - на заданный угол для передачи заготовки на следующую позицию. В дальнейшем цикл повторяется.
Предмет изобретения
Автооператор для перемещения заготовок, включающий рабочий орган с захватами, силовой цилиндр и ролик, взаимрдействуюпщй
с цилиндрическим копиром, снабженным продольными и наклонными пазами, отличающийся тем, что, с целью исключения поворота рабочего органа в направлении, противоположном заданному, наклонные пазы цилиндрического копира выполнены переменной глубины с постепенным подъемом в сторону, обратную направлению его вращения, и образуют уступ с продольными пазами, а ролик выполнен подпружиненным.
Л12
штуут
Z,
Ш2
////////////1//////////А
fS
Pui.3
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочно-разгрузочное устройство | 1990 |
|
SU1710288A2 |
| Загрузочно-разгрузочное устройство | 1987 |
|
SU1491656A1 |
| АВТООПЕРАТОР | 1965 |
|
SU176166A1 |
| Устройство для отделения от стопы плоской заготовки и подачи ее в пресс | 1983 |
|
SU1117105A1 |
| УСТРОЙСТВО ДЛЯ ФРЕЗЕРОВАНИЯ ЗАМКНУТЫХ ПРОДОЛЬНЫХ ВИНТОВЫХ И СПИРАЛЬНЫХ КАНАВОК | 2011 |
|
RU2458763C1 |
| Устройство для определения листовых заготовок от стопы и подачи их в пресс | 1984 |
|
SU1183254A1 |
| Роторный станок для шлифования отверстий деталей | 1989 |
|
SU1660940A1 |
| Устройство для подачи листовых заготовок в рабочую зону пресса | 1991 |
|
SU1777569A3 |
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| Агрегат для химической подготовки поверхности | 1982 |
|
SU1168631A1 |