Известны автооператоры для загрузки и разгрузки станков, содержащие храповой и копировальный механизмы с гидропневмоцилиндром.
Предлагаемый автооператор позволяет повысить производительность процесса питания станков заготовками и обеспечить поворот рабочего органа автооператора в заданном направлении.
С этой целью шток гидропневмоцилиндра привода автооператора выполнен поворотным относительно цилиндра и жестко соединен с рабочим органом автооператора, а оси вращения собачек храпового механизма размещены вокруг штока на втулках, снабженных роликами, взаимодействующими с коиирным механизмом.
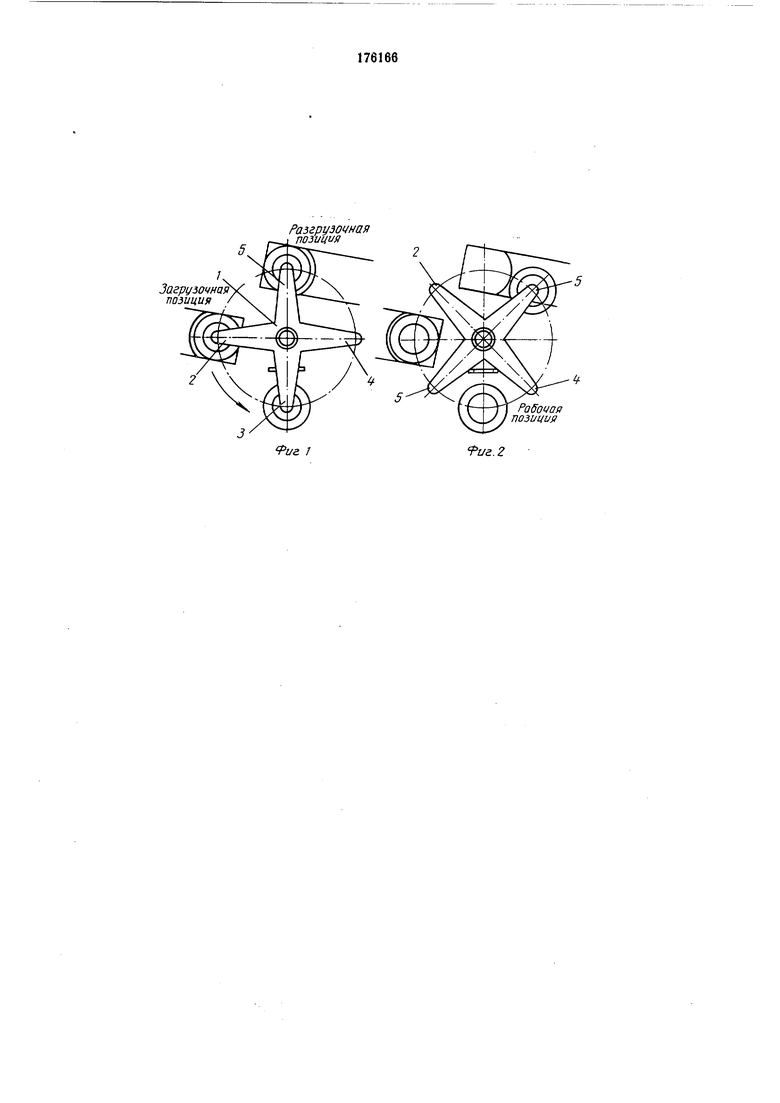
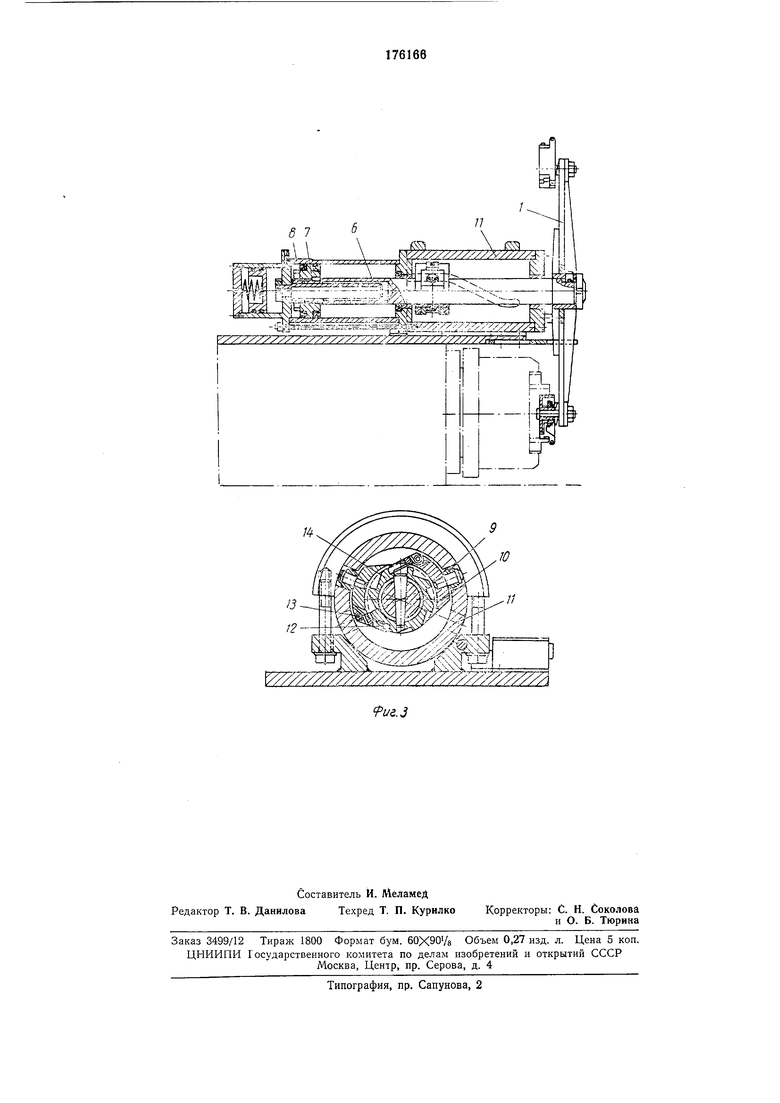
На фиг. 1 изображена схема автооператора; на фиг. 2 - то же, положение в момент обработки; на фиг. 3 - то же, конструктивное выполнение в двух проекциях.
Рабочий орган 1 автооператора представляет собой жестко связанные друг с другом руки 2, 3, 4, 5, две из которых (руки 2 и 4) снабжены захватами для заготовок и переносят их с загрузочной позиции на рабочую, а две другие (руки сЗ и 5) - захватами для готовых деталей и переносят последние с рабочей позиции на разгрузочную.
При ходе поршня 7 в одну сторону копирные ролики 9, закрепленные в свободно вращающихся на штоке 6 втулках 10 и перемещающиеся по пазам копира 11, через собачки 12, оси 13 которых закреплены в тех же втулках 10, поворачивают храповое колесо 14, жестко сидящее на штоке, на угол 45°. При прямом и обратном ходе поршня 7 поворот рабочего органа осуществляется в одну сторону благодаря храповому механизму.
Обработка заготовки происходит, когда рабочий орган занимает промежуточное положение.
15
Предмет изобретения
Автооператор для питания рабочих позиций станков заготовками, содержащий храповой
и копировальный механизмы с гидропневмоцилиндром, отличающийся тем, что, с целью повышения производительности процесса питания станков заготовками и обеспечения поворота рабочего органа автооператора в заданном направлении шток гидропневмоцилиндра выполнен поворотным относительно цилиндра и жестко соединен с рабочим органом автооператора, а оси вращения собачек храпового механизма размещены вокруг штока на втулРазгрузо наяno3vijua
fuz /
Работая позиция
fuz.Z
8 1
7/
, A...., 
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТООПЕРАТОР ДЛЯ ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК | 1969 |
|
SU244085A1 |
| Автооператор | 1970 |
|
SU355848A1 |
| Автооператор | 1976 |
|
SU729028A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Автооператор | 1986 |
|
SU1379055A1 |
| АВТООПЕРАТОР | 1971 |
|
SU305035A1 |
| Гальваническая автооператорная линия для обработки мелких деталей | 1981 |
|
SU986972A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в зону обработки | 1986 |
|
SU1524959A1 |
| ПРИВОД ПЕРЕМЕЩЕНИЯ РАБОЧЕГО ОРГАНА | 1992 |
|
RU2042489C1 |