НИИ диска механизма загрузки относительно диска автооператора. В загрузочноразгрузочном устройстве при перемещении вверх стороны 6 двустороннего штока силового цилиндра 5 автооператора вместе с ней поднимается закрепленный на ней диск 9 с захватами и цилиндрический копир 8. При движении стороны 7 двустороннего штока начинает подниматься соединенный с ней рычаг 31. В свою очередь, рычаг 31 сообщает поступательное движение валу 25 и связанному с ним диску 27 со шприцами 28, при
этом шприцы 28 с набранной жидкостью выходят из ванны. До момента остановки поршня 18 сторона б двустороннего штока с диском 9 и захватами 10 совершает только поступательное движение. При опускании стороны 7 двустороннего штока начинает идти вниз рычаг 31, который через вал 25 опускает диск 27 со шприцами 28, одна группа которых, заполненная жидкостью, заходит в детали на захвате 10, а другая группа,пустая, - в ванну 4. 3 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочно-разгрузочное устройство | 1987 |
|
SU1491656A1 |
| Автооператор | 1979 |
|
SU837757A1 |
| Автооператор | 1979 |
|
SU772809A1 |
| Установка для очистки торцов цилиндрических изделий | 1988 |
|
SU1556770A1 |
| Устройство для укладки бутылок в ящики | 1982 |
|
SU1098869A1 |
| Автомат для горячего нанесения покрытий на трубы | 1981 |
|
SU998576A1 |
| АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1991 |
|
RU2022752C1 |
| Автооператор | 1981 |
|
SU1047653A1 |
| Гибкий производственный модуль для резки заготовок из прутков круглого и квадратного проката | 1986 |
|
SU1431915A1 |
| Устройство для изготовления и надевания чехлов на конденсаторы | 1985 |
|
SU1372394A1 |
Изобретение относится к машиностроению и может быть использовано при подаче деталей к технологическому оборудованию, а также для заливки жидкости и является усовершенствованием устройства по авт.св. N2 1491656. Цель изобретения - расширение технологических возможностей за счет создания возможности осевого перемеще-« 37 36 / / / / <шзйзда—V/^^Ою00 00>&ю
Изобретение относится к машиностроению, может быть использовано при подаче деталей к технологическому оборудованию и является усовершенствованием устройства по авт.св. fsfe 1491656.
Цель изобретения - расширение технологических возможностей за счет создания возможности перемещения диска механизма загрузки относительно диска автооператора.
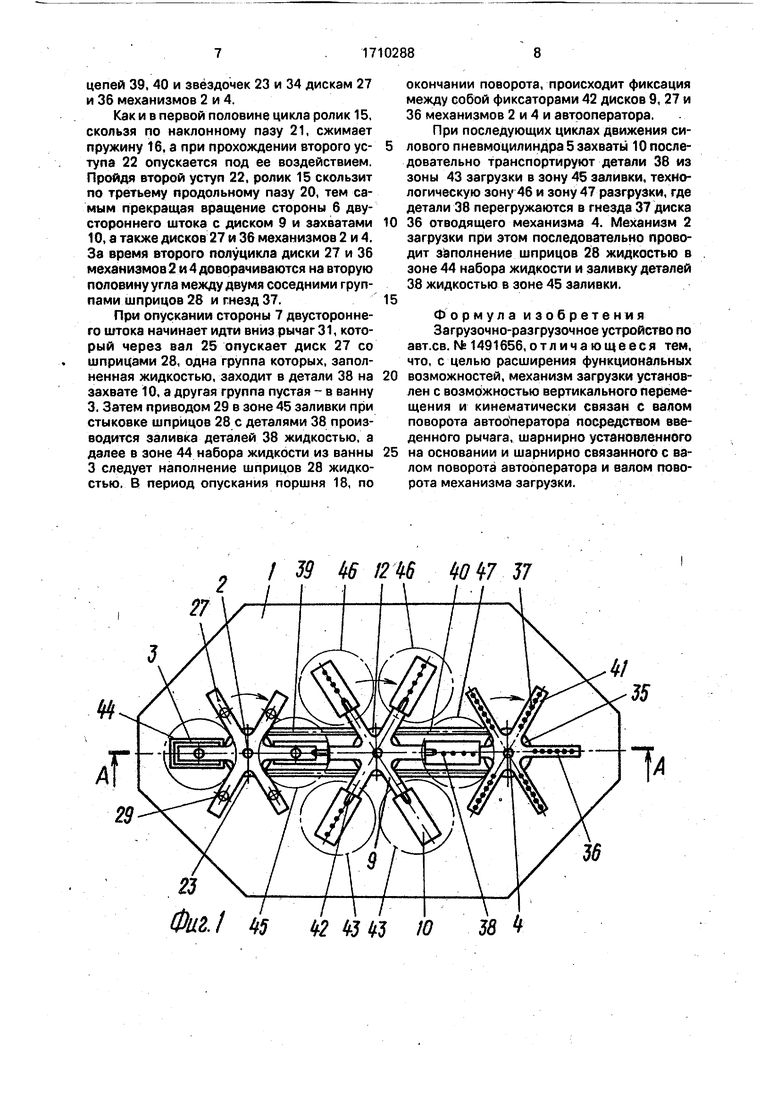
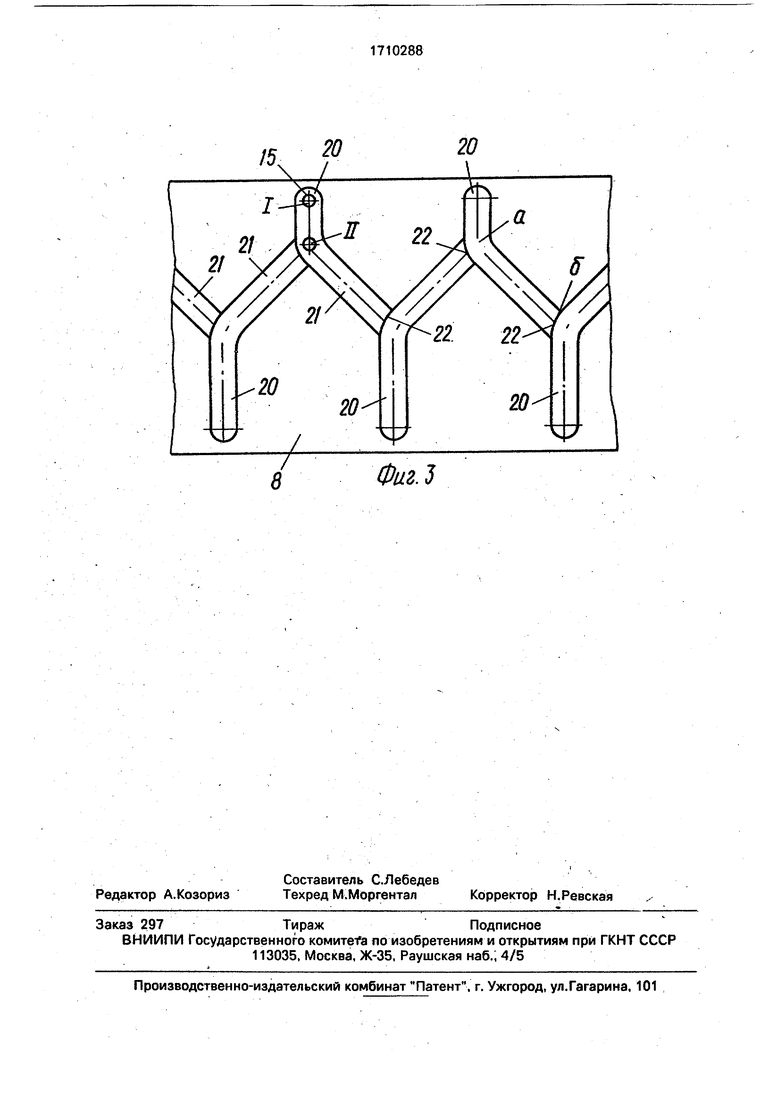
На фиг.1 показано загрузочно-разгрузочное устройство, общий вид; на фиг.2 разрез А-А на фиг.1,-.на фиг.З - развертка цилиндрического копира.
Загрузочно-разгрузочное устройство содержит основание 1, автооператор, механизм 2 загрузки, ванну 3, заполненную, например, электролитом и установленную на основании 1, и отводящий механизм 4. Автооператор включает силовой пнёвмоцилиндр 5, вертикально закрепленный на основании 1. с двусторонним штоком со сторонами 6 и 7, и жестко установленные на стороне 6 двустороннего штока цилиндрический копир 8 и диск 9 автооператора с захватом 10. Силовой пневмоцилиндр 5 имеет фланец 11, на котором размещена звездочка 12 с возможностью вращения на подшипнике 13. Внутри звездочки 12 размещена сторона 6 двустороннего штока с возможностью взаимодействия со звездочкой 12 посредством закрепленной на ней шпонки 14. Во фланце 11 силового пневмоцилиндра 5 установлен направляющий ролик 15, подпружиненный пружиной 16 относительно крышки 17, при этом цилиндрический копир 8 установлен с возможностью взаимодействия с направляющим роликом 15. Силовой пневмоцилиндр 5 имеет поршень 18. Сторона 6 двустороннего штока соединена с поршнем 18с возможностью вращения в подшипнике 19, а сторона 7 деустороннего штока жестко соединена с
поршнем 18. На цилиндрическом копире 8 (фиг.З) выполнено несколько расположенных в шахматном порядке продольных пазов 20, соединенных между собой
наклонными пазами 21. В свою очередь, наклонные пазы 21 выполнены с переменной глубиной, т.е. образующая их дна имеет постоянный подъем от точки а до точки б (фиг.З), в переходных точках б и а образуется
уступ 22, по высоте равный, например, 0,5 глубины продольного паза 20. Угловое размещение продольных пазов 20 на цилиндрическом копире 8 соответствует угловому размещению захватов 10 на диске автооператора (фиг.1).
, Механизм 2 загрузки снабжен звездочкой 23, установленной с возможностью вращения в подшипнике 24, Внутри звездочки 23 размещен вал 25, установленный вертикально с возможностью взаимодействия со звездочкой 23 посредством закрепленной на нем шпонки 26. На верхнем конце вала 25 жестко закреплен диск 27 механизма 2 загрузки с расположенными на нем шприцами 28 и приводом шприцов 29. Механизм 2 загрузки снабжен шарниром 30 и рычагом 31. Вал 25 посредством рычага 31, установленного на шарнире 30, связан со стороной 7 двустороннего штока силового пневмоцилиндра 5, при этом ось 32 вращения рычага 31 расположена на неподвижной опоре 33. Отводящий механизм 4 состоит из звездочки 34, установленной на подшипнике 35, на которой жестко закреплен диск 36 с гнездами 37 для загрузки в. них обработанных деталей 38. Звёздочка 34 отводящего механизма 4 и звездочка 23 механизма 2 загрузки соединены со звездочкой 12 цепными передачами 39 и 40. Причем, передаточное отношение цепных передач 39 и 40 ведущей 12 и ведомой 23 и 34 звездочек равно или кратно угловому размещению шприцов 29 на диске 27 и гнезд 37 на диске
36, а также продольных пазов 20 на цилиндрическом копире 8. На дисках 27 и 36 механизма 2 загрузки и отводящего механизма 4 выполнены продольные пазы 41, а на захватах 10 установлены фиксаторы 42 с возможностью взаимодействия с продольными пазами 41.
Устройство имеет также зоны 43 загрузки (фиг.1), зону 44 набора жидкости, зону 45 заливки, технологическую зону 46, зону 47 разгрузки, а также верхнюю полость 48, нижнюю полость 49 и уплотнительные кольца (фиг.2) силового пневмоцилиндра 5.
Устройство работает следующим образом,
В исходном состоянии диск 9 с захватами 10 находится в крайнем нижнем положении. Механизмы 2 и 4 через продольные пазы 41 удерживаются фиксаторами в ориентированном положении относительно захватов 10. Группа шприцов 28 (фиг.2) находится в это время в ванне 3, где приводом 29 производится набор жидкости, например танталовой суспензии-электролита, в шприцы 28. В этом положении в зоне 43 загрузки (фиг.З) производится загрузка захватов 10 (фиг.2) деталями 38 (фиг.З), например корпусами конденсаторов. Загрузку можно производить как вручную, так и использовать для этого загрузочный механизм, однотипный по конструкции с отводящим механизмом 4, связав их цепной передачей. При подаче сжатого воздуха в нижнюю полость 49 (фиг.2) силового пневмоцилиндра 5 поршень 18 с двусторонним штоком начинает поступательное движение вверх. Вместе со стороной 6 двустороннего штока поднимаются закрепленные на нем диск 9 с захватами 10, цилиндрический копир 8 и направляющая шпонка 14. При движении стороны 7 двустороннего штока начинает подниматься соединенный с ней рычаг 31, поворачиваясь на оси 32. В свою очередь, рычаг 31 сообщает поступательное движение валу 25 и связанному с ним диску 27 со шприцами 28. При этом шприцы 28 с. набранной в них жидкостью выходят из ванны 3. Так как точка соединения вала 25 с рычагом 31 находится на большем плече рычага 31, чем точка соединения рычага 31 ер.стороной 7 двустороннего штока, то скорость движения , диска 27 механизма заливки больше, чем скорость диска 9 автооператора, вследствие чего происходит расфиксация дисков 9 и 27 между собой. Одновременно при этом расфиксируются между собой диск 9 автооператора и диск 36 отводящего механизма 4.
При движении цилиндрического копира 8 (фиг.З) взаимодействующий с ним направляющий ролик 15 вначале скользит по продольному пазу 20 из первой позиции во вторую, а затем переходит на наклонный паз 21. Скользя по наклонному пазу 21, направляющий ролик 15 (фиг.2) принудительно сообщает дополнительное вращательное движение цилиндрическому копиру 8. В результате постепенного подъема дна наклонного паза 21 (фиг.З) от точки а до точки б направляющий ролик 15 (фиг.2), скользя во фланце 11, сжимает пружину 16, которая упирается другим концом в крышку 17. Цилиндрический копир 8 сообщает вращение концом в крышку 17. Цилиндрический копир 8 сообщает вращение стороне 6 двустороннего штока силового пневмоцилиндра 5, которая поворачивается в подшипнике 19 относительно поршня 18, удерживаемого от поворота трением уплотнительных колец 50 и, в свою очередь, приводит во вращение диск 9 с захватами 10 и через направляющую шпонку 14 звездочку 12 в подшипниках 13.
Со звездочки 12 вращение посредством цепей 39 и 40 передается на звездочки 23 и 34, установленные на подшипниках 24 и 35 механизмов 2 и 4. От звездочки 23 через шпонку 26 начинает вращаться вал 25 с диском 27 со шприцами 28, а от звездочки 34 - диск 36 с гнездами 37. При этом вал 25 вращается в шарнире 30, Пройдя уступ 22, направляющий ролик 15 под действием пружины 16 опускается в следующий продольный паз 20 цилиндрического копира 8, вращательное движение стороны 6 штока, а вместе с.ней диска 9, захватов 10 и звездочки 12 прекращается. До момента остановки поршня 18 сторона 6 двустороннего штока с диском 9 и захватами 10 совершает только поступательное движение.
За время вращения диск 9 поворачивается на половину угла между двумя соседними захватами 10, а механизм 2 и 4 - на. половину угла между двумя соседними группами шприцов 28 и гнезд 37.
При обратном движении поршня 18 вниз, при переключении сжатого воздуха из полости 49 в полость 48 силового пневмоцилиндра 5, а вместе с ним и двустороннего штока цилиндрического копира 8 и диска 9 с захватами 10, направляющий ролик 15, скользя по второму продольному пазу 20, минует первый наклонный паз 21, из которого он вышел, так как его вхождению препятствует уступ 22. Далее ролик 15 начинает скользить по следующему наклонному пазу 21, сообщая вращательное движение через цилиндрический копир 8 стороне 6 двустороннего штока и через него диску 9 с захватами 10 и звездочке 12, а далее посредством цепей 39, 40 и звёздочек 23 и 34 дискам 27 и 36 механизмов 2 и 4. Как и в первой половине цикла ролик 15, скользя по наклонному пазу 21, сжимает пружину 16, а при прохождении второго уступа 22 опускается под ее воздействием. Пройдя второй уступ 22, ролик 15 скользит по третьему продольному пазу 20, тем самым прекращая вращение стороны 6 двустороннего штока с диском 9 и захватами 10, а также дисков 27 и 36 механизмов 2 и 4. За время второго полуцикла диски 27 и 36 механизмов2 и4 доворачиааются на вторую половину угла между двумя соседними группами шприцов 28 и гнезд 37. При опускании стороны 7 двустороннего штока начинает идти вниз рычаг 31, который через вал 25 опускает диск 27 со шприцами 28, одна группа которых, заполненная жидкостью, заходит в детали 38 на захвате 10, а другая группа пустая - в ванну 3. Затем приводом 29 в зоне 45 заливки при стыковке шприцов 28 с деталями 38 производится заливка деталей 38 жидкостью, а далее в зоне 44 набора жидкости из ванны 3 следует наполнение шприцов 28 жидкостью. В период опускания поршня 18, по / 9 6/246 / / . . Фаг.1 « 2 4J «J Ю окончании поворота, происходит фиксация между собой фиксаторами 42 дисков 9, 27 и 36 механизмов 2 и 4 и автроператора. При последующих циклах движения силового пневмоцилиндра 5 захвать 10 последовательно транспортируют детали 38 из зоны 43 загрузки в зону 45 заливки, технологическую зону 46 и зону 47 разгрузки, где детали 38 перегружаются в гнезда 37 диска 36 отводящего механизма 4. Механизм 2 загрузки при этом последовательно проводит з)аполнение шприцов 28 жидкостью в зоне 44 набора жидкости и заливку деталей 38 жидкостью в зоне 45 заливки. Формула изобретения Загрузочно-разгрузочное устройство по авт.св.NK 1491656,отличающееся тем, что, с целью расширения функциональных возможностей, механизм загрузки установлен с возможностью вертикального перемещения и кинематически связан с валом поворота автооператора посредством введенного рычага, шарнирно установленного на основании и шарнирно связанного с валом поворота автооператора и валом поворота механизма загрузки. fiOVJ 7 . , 38
20
/5.
Фиг.5
| Загрузочно-разгрузочное устройство | 1987 |
|
SU1491656A1 |
| кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
