Лебедки с дистанционным управлением, включаюш,ие привод, тормозные и стопорные храповые устройства, известны.
Особенность предлагаемой лебедки состоит в ТОМ, ЧТО храповая собачка шарнирно связана с цилиндром-золотником, который пневматически или гидравлически соединен с пилотзолотником, управляющим реверсом двигателя, а в цепи управления цилиндра-золотника установлен дроссель с обратным клапаном. Такое усовершенствование позволяет автоматизировать освобождение-накладывание храповой собачки и ПОВЫСИТЬ надежность работы лебедки.
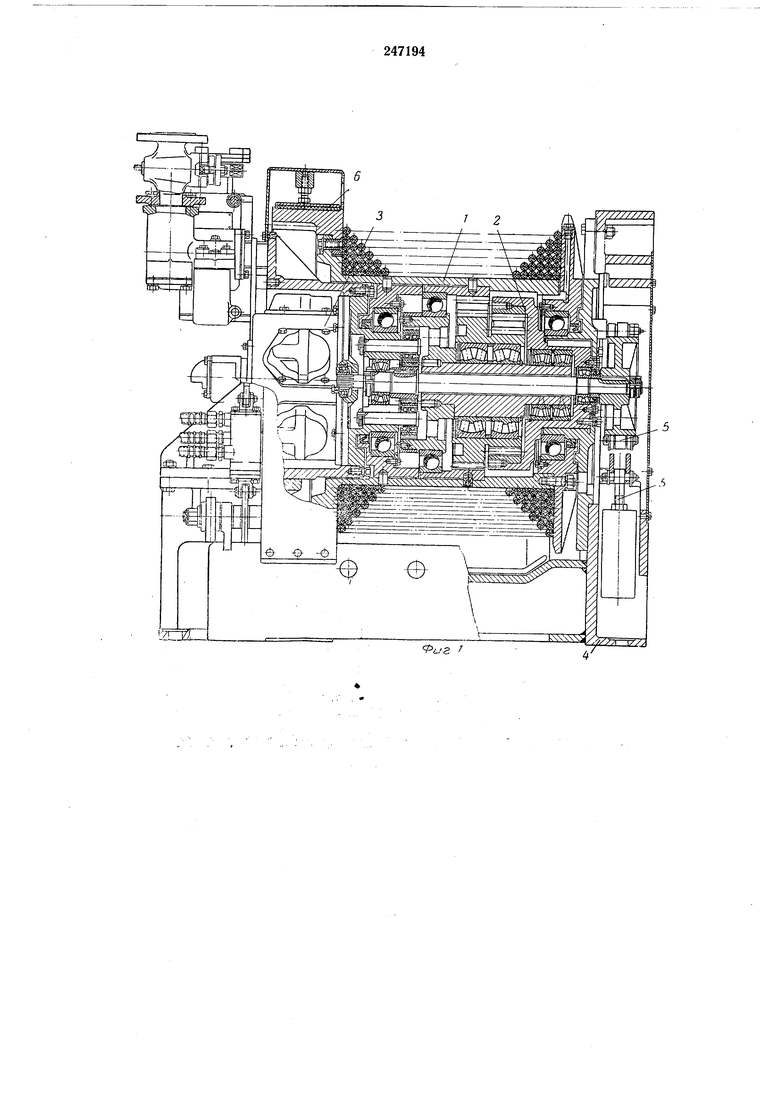
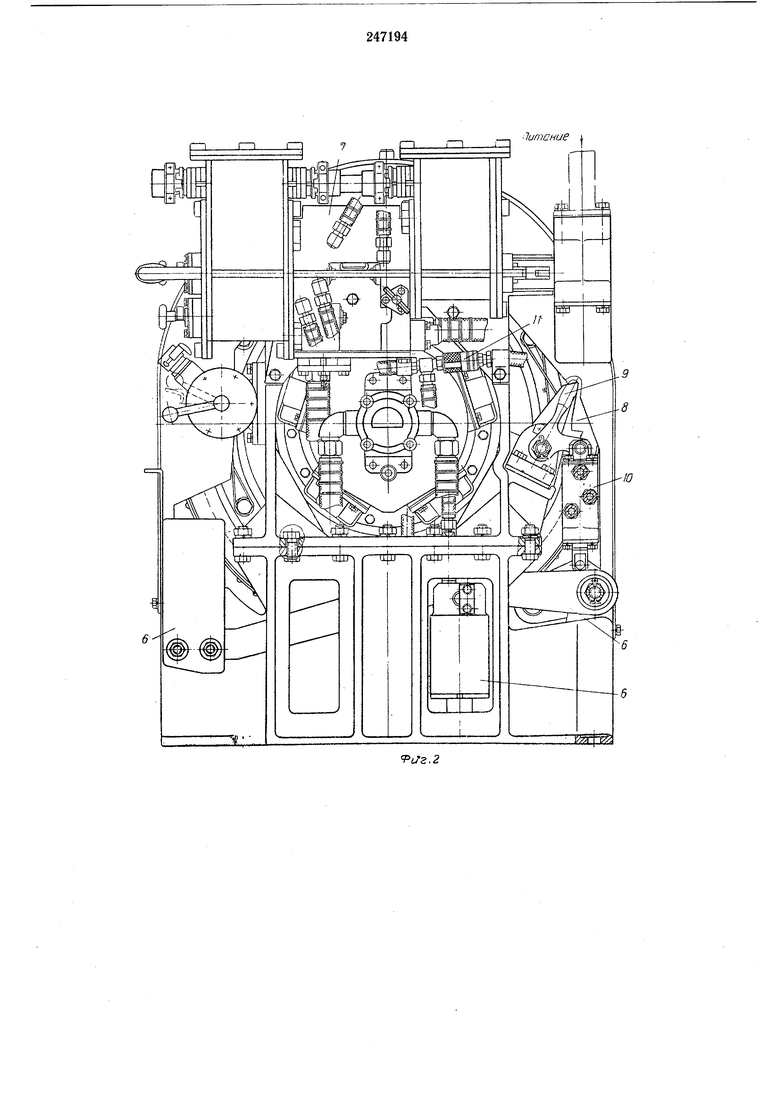
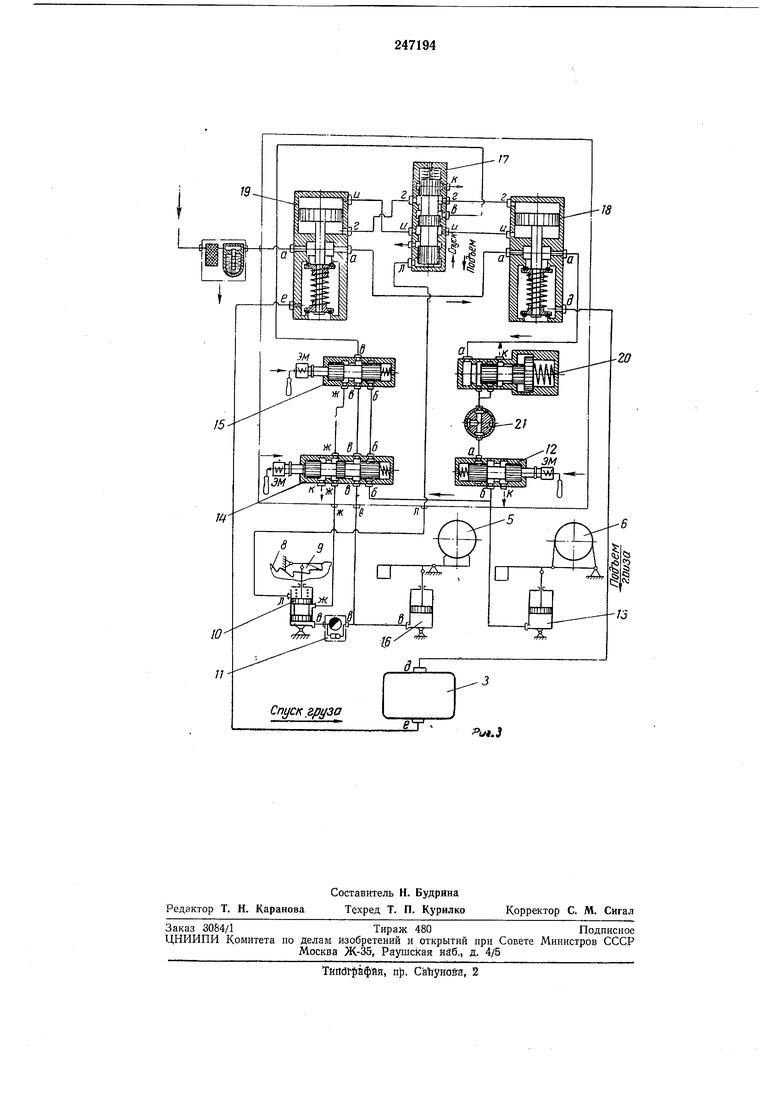
На фиг. 1 схематически изображена описываемая лебедка, разрез по оси барабана; на фиг. 2 - ТО же, вид на торец с изображением пневмо(гидро)двигателя, пульта управления, стопорного устройства, предохранительного тормоза и дросселя с обратным клапаном; на фиг. 3 - пневматическая (или гидравлическая) схема управления лебедкой.
Лебедка состоит из барабана 1 с встроенным редуктором 2, реверсивного пневмо- или гидродвигателя 3, рамы 4, маневрового тормоза 5, предохранительного тормоза 6, пульта управления 7 с пилот-золотником, храпового устройства с храповым колесом 8, собачкой 9 я цилиндром-золотником 10. в пневмогидрокоммуникацию встроен дроссель с обратным клапаном 11.
Лебедка работает следующим образом.
Включением золотника 12 влево производится подготовка лебедки к пуску на подъем или спуск. Рабочая среда (сжатый воздух или рабочая жидкость) из канала аа поступает к цилиндру 13 и растормаживает предохранительный грузовой тормоз 6. Одновременно по каналу бб рабочая среда подводится к золотнику М управления спуском и золотнику 15 управления подъемом груза.
Включение лебедки на подъем груза производится перемещением золотника 15 вправо, благодаря чему магистраль бб соединяется с магистралью ев, по которой сжатый воздух поступает одновременно к цилиндру 16 растормаживания маневрового тормоза 5, к цилиндру-золотнику 10 храпового устройства и к пилот-золотнику 17. Последний, находясь в нижнем положении, направляет рабочую среду по каналам гг в поршневую (рабочую) полость клапанного устройства 18 подъема и в штоковую ПОЛОСТЬ (выхлопную) клапанного устройства 19 спуска груза.
Под воздействием рабочей среды в клапанном устройстве подъема открывается верхнее отверстие, а в клапанном устройстве спуска- нижнее отверстие, и рабочая среда из магистрали аа поступает в магистраль дд и далее
в двигатель, обеспечивая вращение барабана лебедки на иодъем груза. Часть отработанного воздуха из двигателя по магистрали ее через нижнее отверстие клапанного устройства 19 выходит в атмосферу. Одновременно с этим снимается маневровый тормоз 5, а цилиндрзолотник 10 выводит храповую собачку 9 из зацепления с храповым колесом 8.
Выключение лебедки на спуск груза осуществляется перемещением золотника 14 вправо, при этом магистраль бб соединяется с магистралью ев и посредством золотника 15, находящегося в выключенном состоянии (крайне левом) - с магистралью жж, которая подключена к цилиндру-золотнику 10. Если собачка 9 храпового стопорного устройства будет защемлена в зубьях храпового колеса, то цилиндр-золотник 10 и пилот-золотник 17 будут находиться в нижнем положении, и двигатель включится в сторону подъема груза. При повороте барабана на некоторый угол собачка под действием рабочей среды выйдет из зацепления с зубом храпового колеса и позволит золотнику 10 занять верхнее положение в цилиндре, при котором магистраль жж соединится с магистралью лл, по которой рабочая среда поступит под торец пилот-золотника 17 и перебросит его в верхнее положение. В этом положении пилот-золотник 17 соединит магистраль ев с магистралью ии, а магистраль гг с выхлопом /С. Произойдет автоматический реверс двигателя на режим спуска груза.
При останове лебедки все золотники под действием пружин возвращаются в исходное
положение, перекрывая пути рабочей среде и сообщая все рабочие полости с атмосферой. В этом случае дроссель с обратным клапаном // обеспечивает наложение собачки на х-ра-. повое колесо после останова двигателя и торможения Маневрового тормоза 5, что исключает ударные нагрузки Е лебедке при ее стопорении.
В системе предусмотрено .клапанное устройство 20 для автоматического выключения лебедки при падении давления ниже допустимого и аварийный клапан 21.
Предмет-изобретения
Лебедка с дистанционным управлением,
включающая привод с пилот-золотником для
реверса двигателя, тормозные « стопорное
храповое устройства, отличающаяся тем, что,
с целью автоматического освобождения-накладывания храповой собачки и повышения надежности работы, она снабжена цилиндромзолотником, пневматически или гидравлически соединенным с пилот-золотником и шарнирно связанным с храповой собачкой, а в
цепи управления цилиндра-золотника установлен дроссель с обратным клапаном.
lurncHue
/5
20
i/.J
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическая поршневая таль | 1974 |
|
SU552285A1 |
| Гидравлический привод лебедки | 1990 |
|
SU1763350A1 |
| Врубовая машина тяжелого типа для круто падающих пластов | 1933 |
|
SU34486A1 |
| ГИДРОПРИВОД ЛЕБЕДКИ | 2000 |
|
RU2196722C2 |
| Система управления пружинно-гидравлическим приводом тормоза шахтных подъемных машин | 1979 |
|
SU787327A1 |
| Пневматическая барабанная лебедка на тележке | 1931 |
|
SU31111A1 |
| Буксирная лебедка для трактора | 1971 |
|
SU1034984A1 |
| Гидравлический привод крана- трубоукладчика | 1978 |
|
SU719960A1 |
| Ручная лебедка | 1980 |
|
SU919979A1 |
| Протаскивающее устройство сучкорезной машины | 1978 |
|
SU729051A1 |