1
Настоящее изобретение относится к области складского хозяйства, а именно к штабелерам для перемещения, установки ,и съема грузов.
Известны . штабелеры для перемещения, установки и съема грузов, содержащие те-, лежку с приводом для горизонтального перемещения, на которой смонтирована лодвижная по вертикальным стойкам подъемная каретка с приводом, лесущая выдвижную грузовую нлощадку, .перемещающуюся в направляющих.
У этих щтабелеров .рабочая поверхно.сть выдвижной грузовой площадки, на которую иепосредственно устанавливают груз, лежит в гориз.онтальн10Й плоскости и движение грузовой площадки происходит в той же .плоскости. Это приводит -к тому, что при установке грузов в наклонные гравитационные стеллажи, например в гравитационные рольганги, и съеме грузов требуется дополнительный .вертикальный ход выдвижной грузовой площадки. При этом увеличивается расстояние по высоте между смежными рольгангами и, соответственно, уменьщается лолезво используемый объем рабочего помещения, например склада.
Для улучщения использования объема рабочего помещения складов с гравитационными стеллажами направляющие выдвиж.ной грузовой площадки смонтированы на опорах.
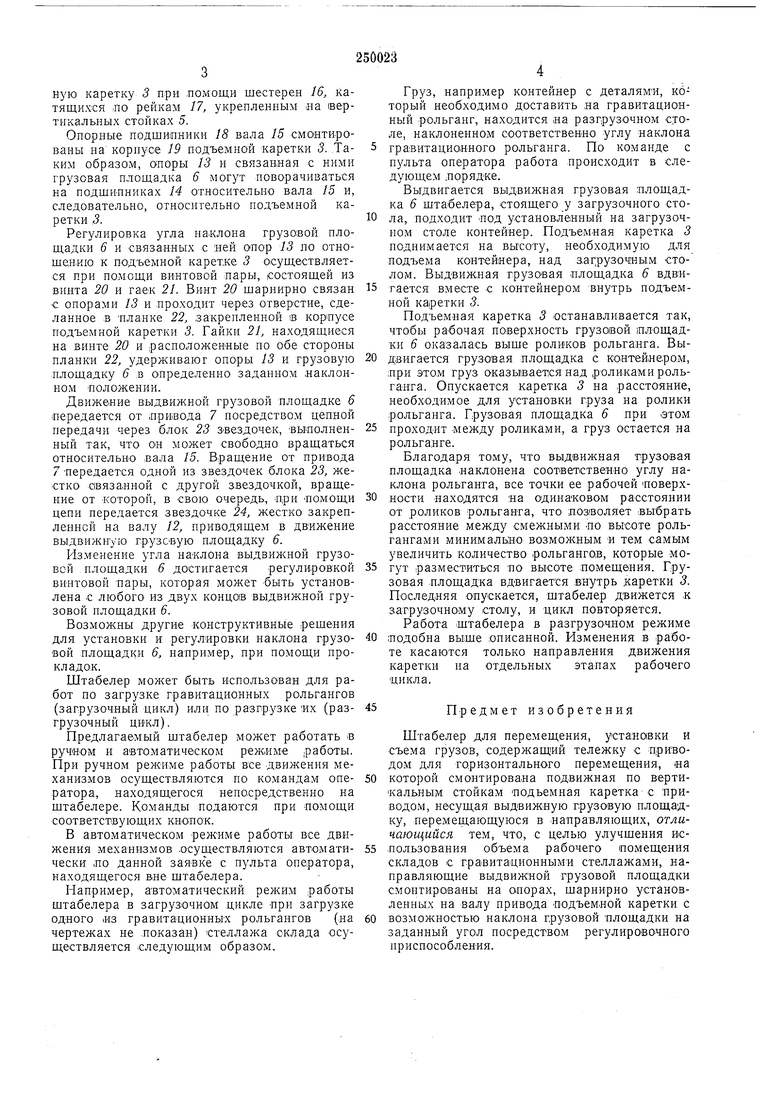
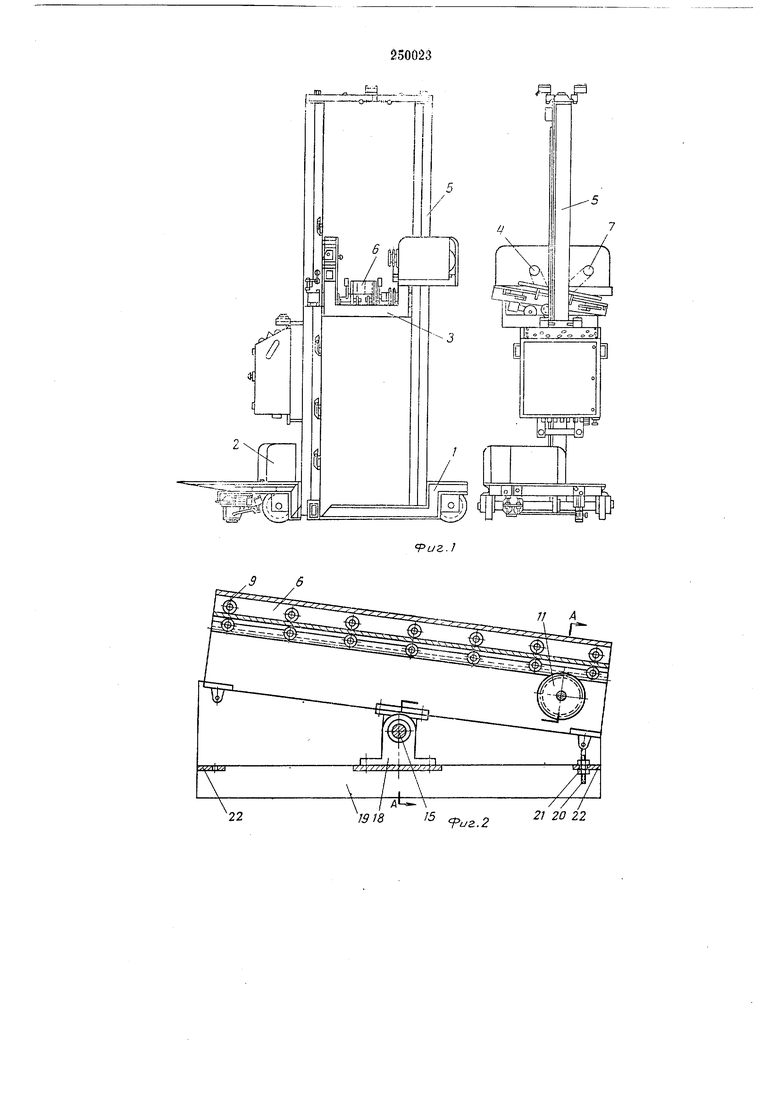
шарнирио установле.нпых на валу привода подъемной каретки с возможностью наклона грузовой площадки на заданный угол посредством регулировочного приспособления. На фиг. 1 изображен предлагаемый щтабелер в двух проекциях; на фиг. 2 - выдвижная грузовая площадка, продольный разрез; на фиг. 3 -.разрез по А-А на фиг. 2. Штабелер содержит тележку / с приводом
2 для горизонтального перемещения, на которой смонтирована подъемная каретка 3 с приводом 4 вертикального перемещения. Каретка 3 двигается по .вертикальным стойкам 5, закрепленным на тележке /.
На подъемной каретке 3 смо.нтирована 1выдвил иая грузовая площа.дка 6 с приводом 7 для ее выдвижения.
Грузовая площадка 6 снабжена жестко связанными с .ней расположенными по всей длпне направляющими выступамп 8, которые могут перемещаться в направляющих ролпках5. Грузовая площа.дка, к которой жестко .присоединены зубчатые рейки 10, нолучает перемепдение относительно подъемной каретки 3
.от шестерен 11, жестко закрепленных па валу 12 и взаимодействующих с зубчатыми рейками 10. Направляющие ролики 9 и вал 12 смонтированы на опорах 13, к. которым прикреплены подщипники 14, в которых вращаную каретку 3 при ломощи шестерен 16, катящихся ло рейкам 17, укрепленным на вертикальных стойках 5.
Опорные подшипники 18 вала 15 смонтированы на корнуое 19 подъемной каретки 3. ТаКИМ образом, опоры 13 и связанная с ними грузовая площадка 6 могут поворачиваться на подшИПниках 14 относительно вала 15 и, следовательно, относительно подъемной каретки 3.
Регулировка угла наклона грузовой площадки 6 и связанных с ней опор 13 по отношен.кю к подъемной каретке 3 осуществляется при помощи винтовой пары, состоящей из винта 20 и гаек 21. Винт 20 шарнирно связан с опорами 13 и лроходит через отверстие, сделанное в Планке 22, закрепленной в корпусе подъемной каретки 5. Гайкн 21, находящиеся на винте 20 и расположенные по обе стороны планки 22, удерживают опоры 13 и грузовую ллощадку 6 в олределенно заданном наклонном положении.
Движение выдвижной грузовой нлощадке 6 передается от .привода 7 посредством цепной передачи через блок 23 3Вездоче.к, выполненный так, что он может свободно вращаться относительно вала 15. Вращение от привода 7 Передается одной из звездочек блока 23, жестко связанной с другой звездочкой, вращение от Которой, в свою очередь, яри помощи цепи передается звездочке 24, жестко закрепленной на валу 12, приводящем в движение выдвил ную грузовую площадку 6.
Изменение угла наклона выдвижной грузовой площадки 6 достигается регулировкой винтовой пары, которая может быть установлена с любого из двух концов выдвижной грузовой площадки 6.
Возможны другие конструктивные решения для установки и регулировки наклона грузовой площадки 6, например, при помощи прокладо:к.
Штабелер может быть использован для работ по загрузке гравитационных рольгангов (загрузочный цикл) или по разгрузке их (разгрузочный цикл).
Предлагаемый штабелер может работать в ручном и автоматическом режиме работы. При ручном режиме работы все движения механизмов осуществляются по командам олератора, находящегося непосредственно на штабелере. Команды подаются при помощи соответствующих кнопок.
В автоматическом режиме работы все движения механизмов осуществляются автоматически ,по данной заявке с пульта оператора, находящегося вне штабелера.
Например, автоматический режим работы щтабелера в загрузочном цикле при загрузке одного 1из гравитационных рольгангов (на чертежах не показан) стеллажа оклада осуществляется следующим образом.
Груз, например контейнер с деталямИ, который необходимо доставить на гравитационный рольганг, находится на разгрузочном столе, наклоненном соответственно углу наклона гравитационного рольганга. По команде с пульта оператора работа происходит в следующем порядке.
Выдвигается выдвижная грузовая площадка 6 штабелера, стоящего у загрузочного стола, подходит под установленный на загрузочном столе контейнер. Подъемная каретка 3 поднимается на высоту, необходимую для подъема контейнера, над з.аг;рузоч1ным столом. Выдвижная грузовая площадка 6 вдвигается вместе с контейнером внутрь подъемной каретки 3.
Подъемная каретка 3 останавливается так, чтобы рабочая поверхность грузовой площадки 6 оказалась выше роликов рольганга. Выдвигается грузовая площадка с контейнером, лри этом груз оказы1вает1ся над роликам и рольганга. Опускается каретка 3 на расстояние, необходимое для установки груза на ролики рольганга. Грузовая площадка 6 при атом проходит между роликами, а груз остается на рольганге.
Благодаря тому, что выдвижная грузовая площадка наклонена соответственно углу наклона рольганга, все точки ее рабочей поверхности находятся на одинаковом расстоянии от роликов рольганга, что позволяет выбрать расстояние между смежными по высоте рольгангами минимально возможным и тем самым увеличить количество рольгангов, которые могут разместиться по высоте помещения. Грузовая площадка вдвигается внутрь каретки 3. Последняя опускается, щтабелер движется к загрузочному столу, и цикл повторяется.
Работа штабелера в разгрузочном режиме подобна выше описанной. Изменения в работе касаются только направления движения каретки на отдельных этапах рабочего цикла.
Предмет изобретения
Штабелер для перемещения, установки и съема грузов, содержащий тележку с приводом для горизонтального перемещения, на которой смонтирована подвижная по вертикальным стойкам подьемная каретка с приводо.м, несущая выдвижную грузовую площадку, перемещающуюся в направляющих, отличающийся тем, что, с целью улучшения использования объема рабочего помещения складов с гравитационными стеллажами, направляющие выдвижной грузовой площадки смонтированы на опорах, щарнирно установленных на валу привода подъемной каретки с возможностью наклона грузовой площадки на заданный угол посредством регулировочного приспособления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШТАБЕЛЕР ДЛЯ ПЕРЕМЕЩЕНИЯ УСТАНОВКИ И СЪЕМАГРУЗОВ | 1970 |
|
SU268993A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯШТАБЕЛЕРОМ | 1969 |
|
SU257577A1 |
| ШТАБЕЛЕР ДЛЯ ПЕРЕМЕЩЕНИЯ, УСТАНОВКИ И СЪЕМА ГРУЗОВBtttUtUolifl?! | 1969 |
|
SU254390A1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО АВТОМАТИЗИРОВАННОГОСКЛАДА | 1971 |
|
SU299418A1 |
| БИБЛИОТЕКА | | 1971 |
|
SU302308A1 |
| ВЗССО'гОЗНАЯ | 1973 |
|
SU368153A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Грузоподъемная платформа крана- шТАбЕлЕРА | 1979 |
|
SU793906A1 |
| КРАН-ШТАБЕЛЕР | 1970 |
|
SU282143A1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
22
П А
// / 21 20 22 15
иг.2
13 9 8 Ю Л 6 12
5 7 ц Т 24
/// / / / /
А-А
.3
