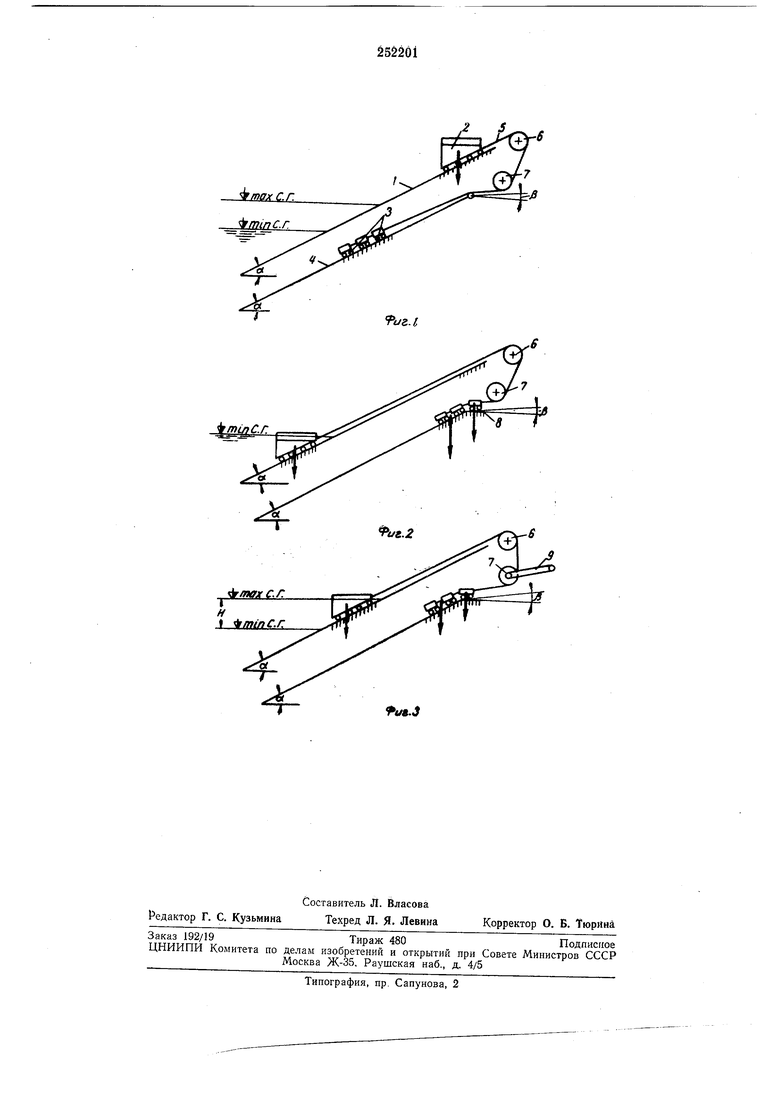
ТЙзобретение относится к наклонным судоподъемникам, в которых перевозка судов из одного бьефа в другой производится наплаву Ё заполиеняой водой судовозной камере. Известные судоподъемники, содержащие рельсовые пути и устаиовленяую на «их судовозную камеру, соединенную с помощью тросо-блочной системы с подвижным лротийовесом, ,не обеспечивают равновесия между камерой и .противовесом ири заходе 1камеры в воду. С целью устранения этого недостатка путь противовеса выполнен ломаного или криволинейного очертания, .причем уклои каждого участка определяется ino формуле: (1ЬпIn т BK-наибольшая ширина камеры;/к-наибольшая длина камеры; Ь„ -ширина противовеса; /п - длина противовеса; Yn -удельный вес лротивавеса; Тв -удельный вес воды; а -уклон иутей камеры; rt -нуклон противовеса участка лути; камеры для данной глубины погружения; Vi - погруженный объем судовозной камеры; А Г;-глубина (Погружения днища камеры под уровнем бьефа. На фиг. 1 изображена схема судоподъемника; на фиг. 2 - то же, но в момент, когда судовозная камера погрузилась в воду; на фиг. 3 - схема судоподъемника в случае, когда бьеф имеет значительные навигационные колебания. Описываемый судоподъемник содержит наклонные рельсовые пути /, на которых установлена судовозная камера 2, уравновешиваемая противовесами 3. Последние перемещаются по наклонным путям 4. Противовесы связаны с судовозной камерой тросами 5, переброшен«ыми через стационарный блок 6 и дополнительный блок 7, смонтированный в направляющих с возможностью перемещения по ним. Все силы трения, сопротивление ветра и вес вытравленных тросов преодолеваются приводным механизмом (на чертеже не показан), встроенным в блок 6. Уравнение равновесия системы сил наклонного судоподъемника представлено в виде
где Gk-вес судовозлой камеры с водой; Ga-1вес противовесов; а-угол уклона лутей / «амеры 2 и путей 4 противовесов 3.
Когда часть противовесов 3 выходит на участок 8 {.см. фиг. 2) путей 4, имеющий уклон меньший, чем уклон путей 1 судовозной камеры 2, то очевидно, что камера потеряет в весе на величину
Д GU А Г Тв / А А Тв sin а г, где ATi -ALslna- глубина, на которую погрузилась камера в бьеф;
Vi
коэффициент общей лолно iiВк./к-ДП
ты погрул енного объема при данной глубине погружения;
AL-путь, который при этом проходит камера; В -щирина камеры; 4-длина камеры; YB-удельный вес воды; F;-погруженный объем камеры. Составляющая .веса камеры по уклону:
T-.CG.-AGJ.slna.
Составляющая веса противовесов 3 по уклону:
Г„ (0„ - Д GJ-sin 7. + А 0„.sin ,3,
где AGn-вес части противовесов 3, вышедших на другой уклон.
Из условия равенства .Т„.
(Gk - А ) - sin а - (Оп-А Gn) sin а + А Gn sin Рл
о ДО,, -AGij .
откуда sin 3 - sm а.
Д (7„
Вес части противовесов 3 можно выразить через геометрические характеристики. При этом необходимо учесть, что, если камера 2 прошла путь AL, то этот же путь должны пройти противовесы 3.
АОп А/..6п./г„.уп,
где Ьа - щирина всех противовесов; йп-высота; Хп-удельный .вес противовесов.
да,
sin р ( 1 -
sin а ±
AGn
Дг.,-Тв- Sin а ) sin я
Окончательно имеем формулу для определения уклона путей 4 противовесов 3.
(r. А . А. . J .sina) -sinа,
7п
Т. е. уклон путей противовесов зависит только от геометрических размеров судовозной камеры 2 и тележек противовесов 3.
При поднятии горизонта бьефа на величину Я судовозная камера 2, зашедшая в воду, остановится выще по уклону, а противовесы 3 - ниже, так .как длина связывающих их тросов 5 осталась без изменения.
Для того чтобы обеспечить остановку противовесов 5 .в одном и том же месте при колебании уровня бьефа, блок 7 перемешается специальным полиспастовым устройством 9 в направляющих.
Предмет изобретения
Наклонный судоподъемник, содержащий рельсовые пути и установленную на них судовозную камеру, соединенную посредством тросо-блочной системы с подвижным противовесом, отличающийся тем, что, с целью сохранения равновесия между камерой и противовесом при заходе камеры в воду, путь противовеса выполнен ломаного или криволинейного очертания, причем уклон .каждого участка определяется по фо.рмуле:
Sin.3, ( 1 . А . JL- .Yi,.slna
sin я,
ii in Тп
де jSjj -наибольшая ширина камеры;
/к- наибольшая длина камеры; ft,,-щирина противовеса; /п-длина противовеса; Yn-удельный вес противовеса; Тв-удельный .вес воды; а-уклон путей камеры; /-уклон противовеса участка пути;
-коэффициент общей полноk-/k-Ar/
ты погруженного объема камеры для данной глубины погружения;
Vi- погруженный объем судовозной камеры;
А Г -глубина погружения днища камеры под уровнем бьефа.
fuz.l
м.3
| название | год | авторы | номер документа |
|---|---|---|---|
| НАКЛОННЫЙ СУДОПОДЪЕМНИК | 1968 |
|
SU211406A1 |
| Наклонный судоподъемник | 1984 |
|
SU1227766A1 |
| Наклонный судоподъемник | 1981 |
|
SU1004523A1 |
| Наклонный судоподъемник | 1983 |
|
SU1244235A2 |
| Наклонный судоподъемник | 1983 |
|
SU1193232A1 |
| Наклонный судоподъемник | 1984 |
|
SU1154406A1 |
| Наклонный судоподъемник | 1979 |
|
SU861469A1 |
| Наклонный судоподъемник | 1981 |
|
SU1000514A1 |
| Наклонный судоподъемник | 1985 |
|
SU1285111A1 |
| НАКЛОННЫЙ СУДОПОДЪЕМНИК | 1969 |
|
SU235642A1 |